电动舵机核心部套件结构仿真
2021-06-22 08:28黄强强王永爽
机电设备 2021年2期
徐 维,邓 攀,夏 占,黄强强,王永爽
(上海船舶设备研究所,上海 200031)
0 引言
舵机是用于保持和改变船舶航向的专门装置,是船舶重要辅机之一[1]。常规的船舶舵机以液压型式为主,通过电动机驱动主泵运转,输出油液驱动执行机构从而进行转舵。目前,液压舵机技术虽已相对成熟,但仍存在一些固有问题:例如结构复杂且占用空间大、介质泄漏、维护工作量较大等[2-3]。
随着电驱动控制及精密制造技术的发展,制约其发展的瓶颈被突破,逐渐形成了新一代电动舵机技术。电动舵机具有集成度高、重量轻、噪声低及维护简单等优点,有利于推进新一代舰船装备技术发展,尤其是操舵控制系统技术水平的提升。
电动舵机的输出性能是否满足设计要求将直接决定船舶能否正常稳定运行,而其核心部套件的性能则直接决定了设备的可靠性。因此,有必要对电动舵机及其核心部套件进行结构仿真分析。
1 基本结构与原理
1.1 电动舵机组成及工作原理
电动舵机使用电动缸作为驱动机构,设计为摆缸式单舵型式,舵柄的中心轮毂与舵杆相连,两端分别与2只电动缸的输出轴铰接,结构如图1所示。
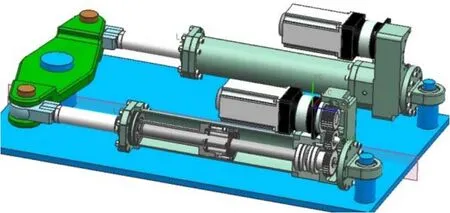
图1 电动舵机几何模型图
操舵时,舵机控制柜接收舵角指令信号,驱动器将控制器的信号与电动缸的伺服电机编码器反馈信号进行比较,按要求驱动电动缸运动输出,从而带动舵柄转动。当舵机旋转至指令舵角时,电动缸的伺服电机停止运转并保持所需扭矩。电动舵机原理框图见图2。

图2 电动舵机原理框图
1.2 电动缸组成及工作原理
电动缸是电动舵机的核心部套件,由伺服电机、减速器、齿轮箱和丝杆等部件组成,其结构组成如图3所示。

图3 电动舵机几何模型图
电动缸工作原理:在伺服电机的驱动下,通过齿轮传动机构以定减速比将动力传给滚柱丝杆,经滚柱丝杆的动力变换作用,将电机旋转动力转换为滚柱螺母的直线动力。
1.3 电动缸主要技术指标
1)输出推力≥225.9kN;
2)工作速度≥0.0412m/s;
3)主要结构参数如表1所示。
2 仿真分析
2.1 丝杆有限元仿真分析
电动缸的承载与传动能力主要取决于行星滚柱丝杆。行星滚柱丝杆为承载的关键核心部套件,需要对其强度进行仿真分析。在行星滚柱丝杆承受载荷时,对丝杆及螺母进行有限元分析,校核其在额定动载荷和额定静载荷下的强度[4-5]。

表1 电动缸主要结构参数
如图4所示,对模型进行简化:传动螺纹部分 以螺纹底径代替螺纹处的直径。施加的边界条件,在丝杆挡肩B处固定,并在丝杆A处分别施加载荷:丝杆的额定动载荷(343.1 kN)及额定静载荷(869.6 kN)。得到对应结果分别如图5和图6所示。

图4 额定动载下丝杆边界条件施加

图5 丝杆计算结果(载荷为额定动载)

图6 丝杆计算结果(载荷为额定静载)
由有限元分析可知:在丝杆承受额定动载时,丝杆的最大应力小于材料的屈服强度(518.42 MPa);在丝杆承受额定静载时,丝杆的最大应力小于材料的屈服抗拉强度(861.3 MPa)。故丝杆的结构强度满足要求。
螺母简化模型见图7:对螺母的螺纹A处采取固定约束;在螺母的法兰B处分别施加轴向载荷,轴向载荷大小分别为丝杆的额定动载(343.1 kN)及额定静载(869.6 kN)。
计算结果分别如图8和图9所示。

图7 螺母边界条件施加

图8 螺母计算结果(载荷为额定动载)

图9 螺母计算结果(载荷为额定静载)
由有限元分析可知:在螺母承受额定动载时,螺母的最大应力小于材料的屈服强度(518.42 MPa);在螺母承受额定静载时,螺母的最大应力小于材料的屈服抗拉强度(861.30 MPa)。因此,丝杆的结构强度满足要求。
2.2 电动舵机运动学仿真分析
运动仿真目的,即为各分系统设计提供输入依据。建立三维模型,根据实际情况赋予质量或惯量属性,并按照给定输入曲线进行仿真。
2.2.1 三维建模
建立舵机三维模型(图1),并赋予质量和惯量属性。
2.2.2 添加运动关系
按照独立属性建立连杆,并根据实际运动关系建立各连杆的运动约束,如图10所示。

图10 电动舵机运动关系添加
运动输入:左侧电动缸按照(A,T)=(267 mm, 24 s)进行正弦位移曲线同步升降运动,运动函数y=267sin(πt/24),运动特性曲线见图11及图12;右侧电动缸按左侧位置随动。
2.2.3 运动仿真结果
设置完成后开展仿真,取2周期运动仿真曲线。
舵柄角度运动仿真结果如图13图14所示。
左侧电动缸运动与舵角运动关系仿真结果如图15和图16所示。

图11 电动舵机左侧电动缸位移曲线
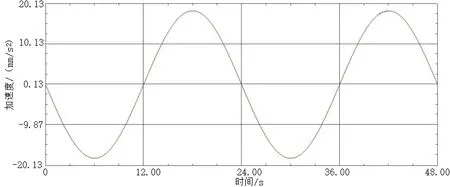
图12 电动舵机左侧电动缸加速度曲线
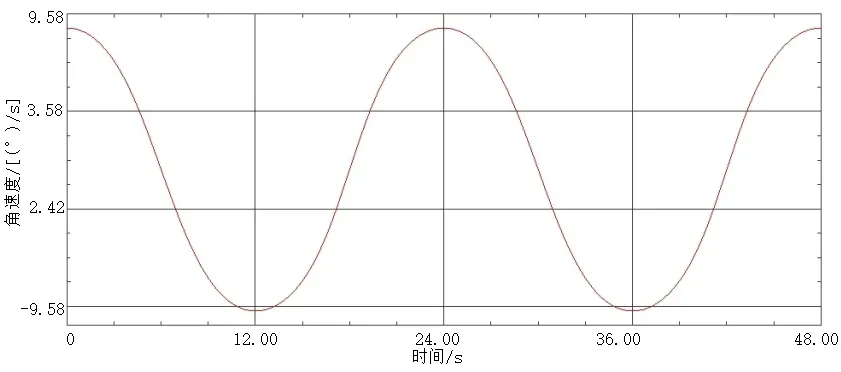
图13 电动舵机舵柄角速度曲线
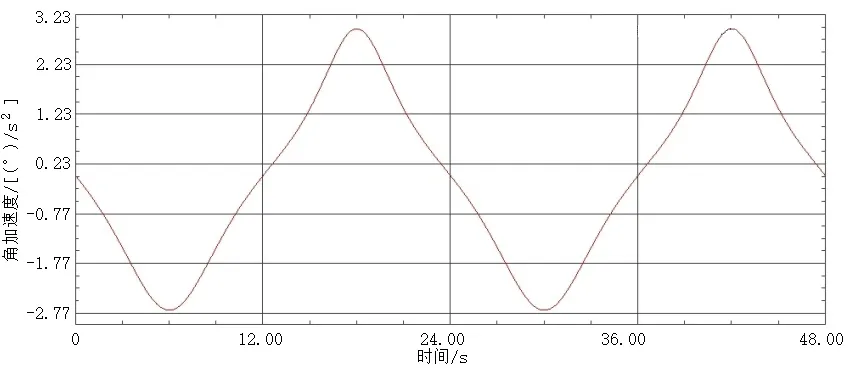
图14 电动舵机舵柄角加速度曲线

图15 舵柄角速度和左侧电动缸位移关系

图16 舵柄角加速度和左侧电动缸位移关系
输出运动动画,如图17所示。

图17 电动舵机运动仿真截图
由运动仿真结果可以看出:按照设计参数,电动舵机的输出性能指标满足设计要求,且结构设计、参数匹配关系合理。
3 结论
本文针对核心部套件电动缸,尤其是核心传动部套件滚柱丝杆,开展了结构仿真计算分析研究,并对整机运动学进行仿真分析,结果表明:当正常工作时,电动舵机核心部套件强度可靠;在规定设计参数下,舵机输出性能良好。
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
制造业自动化(2022年1期)2022-02-11
有色金属材料与工程(2021年4期)2021-11-27
机械制造与自动化(2020年6期)2021-01-04
装备制造技术(2020年3期)2020-12-25
装备维修技术(2020年4期)2020-11-23
山东陶瓷(2020年5期)2020-03-19
制造技术与机床(2019年1期)2019-01-14
中国照明(2016年5期)2016-06-15
西安航空学院学报(2015年3期)2015-05-09