基于双射软决策理论的路段拥堵影响力识别
2021-06-21 03:30许茂增
重庆交通大学学报(自然科学版) 2021年6期
许茂增,张 莉
(重庆交通大学 经济与管理学院,重庆 400074)
0 引 言
交通拥堵增加了城市居民的出行成本,加剧了城市生活的能源消耗和污染,制约了城市的发展[1-2]。缓解城市交通拥堵是一项复杂的系统工程,不仅要关注局部交通状态,而且要关注城市整体的交通运行效率。在现有交通设施的基础上,有效识别并管理对城市整体交通状态影响较大的路段,可以提升交通路网的整体运行效率。
工作日早晚高峰期的交通拥堵是城市交通治理的难点。为提高治理的效果,学者们一直在研究拥堵的特性及治理方法。对静态交通瓶颈,SHEN Wei等[3]结合特殊拓扑结构设置通行费来管控交通流;L.C.DAVIS[4]重点研究了匝道附近的拥堵传播规律及缓解方法;QI Hongsheng等[5]指出路网中存在动态瓶颈即根据需求或供应而转移的瓶颈点,并应用聚类方法及等级信息来识别这些动态瓶颈;倪东生等[6]采用分等级来识别和管理的方法提出了与关键节点相关的现代范式。上述研究中的识别主要是找出交通网中的拥堵区域,是局部交通状态的识别,没有考察路段交通状态与整体交通状态变化之间的关系。笔者提出的方法可以在已知交通状态的基础上识别出对整体交通影响力大的路段,根据对该路段拓扑结构及周边环境的分析,提出了路段管理措施,从而达到提高整体交通运行效率的目的。
城市交通数据经历了从局部到整体、从数字到色彩的过程。最初,交通数据是通过在十字路口和快速通道上部署感应线圈或监控摄像头等传感器来采集的,对采集到的速度、流量和密度等交通流数据进行统计分析,识别局部区域交通状态和拥堵的时空传播规律。随着图像分析技术的发展,监控图像及视频也逐渐用于探测局部交通状态,而通信技术的发展使得基于GPS的手机信令数据、浮动车数据以及车联网数据逐渐被运用到大范围区域交通状态的识别中[7-11]。结合可视化技术,交通状态被离散化为色彩值[12],嵌入电子地图,广泛用于导航系统,地图中,红色表示拥堵,橙色表示缓行,而绿色表示畅通。路网像素色彩的变化蕴含着交通状态的变化,迄今,关于这方面的研究还不多。与其他数据不同的是,路况地图保留了整体区域交通状态的时空特征。用它来研究城市交通,可以同时发现时间维度和空间维度的特点。
笔者为了刻画路段对整体交通的影响,提出了拥堵影响力的概念及其计算和展示的框架,其核心为进行特征约简的双射软决策系统[13],输入是百度实时路况地图序列,输出是各路段的拥堵影响力。研究发现:①基于实时路况地图中的路网像素色彩,可实现路网状态的长向量表示和整体状态的离散化表示,适用于基于图像的交通领域研究;②拥堵变化关键路段是动态的,区别于常规拥堵路段。计算并可视化路段的拥堵影响力,可帮助交通管理部门科学、便捷地锁定位置,观察交通动态变化,提升城市路网交通运行效率。
1 城市路段拥堵影响力识别框架
识别框架的核心即基于路网像素色彩构造的一个双射软决策系统。该系统的参变量是路网色彩特征向量,决策变量是整体交通状态值。由于路网像素点数量庞大,在进行挖掘计算的时候,笔者采用了高维特征约简算法BSSReduce[14]。
1.1 路段及拥堵影响力的定义
定义1路段,在电子地图中,每个像素都对应1个路段。假设地图中包含的道路总面积为M,路网像素的个数为n,则每个像素代表路段面积为M/n。
定义2路段影响力E,即某路段对整体路网交通状态的影响程度。给定整体路网交通状态为Z,考察的路网集合R={r1,r2,…,ri,ri+1,…,rn},其中:ri表示第i个路段。
路段ri的影响力Ei定义为在全路段和不考虑ri时的整体路网交通状态Z变化,如式(1):
Ei=Z|f(R) -Z|f(R-ri)
(1)
式中:Z|f(R)为考虑路段全集合时的Z;Z|f(R-ri)为去掉路段ri时的Z。
定义3拥堵变化关键路段,即路段影响力E>0的像素点。
1.2 路段拥堵影响力的识别框架
路段影响力的计算逻辑与双射软集合理论中的贡献度很接近。在双射软集合理论中,通过特征约简,可以得到参数对决策变量变化的贡献度。基于双射软决策系统来构造计算路段拥堵影响力的框架的步骤如下。
1.2.1 城市路网实时路况的高维特征向量表示
观察宽度 × 高度=x×y的实时路况地图(图1),像素点个数为x×y。经程序处理,仅保留路网像素,得到路网像素图(图2)。像素的色彩值取决于对应路段的平均速度[12],可以反映路段的交通状态。
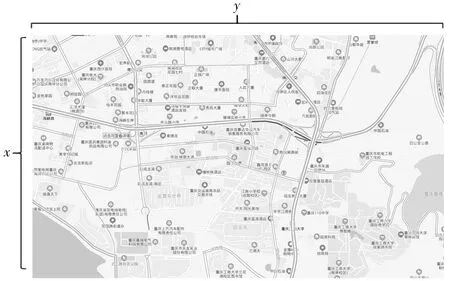
图1 百度路况地图示例Fig.1 Sample of Baidu traffic condition map
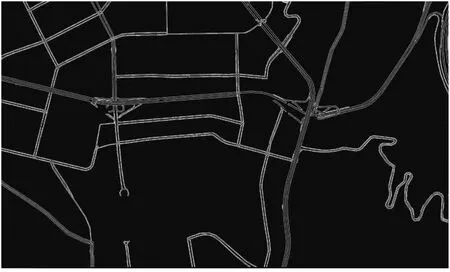
图2 路网像素示例Fig.2 Sample of road network pixels
为图2中的像素集构建像素索引Pindex=m×y+x,其中:m∈[0,-1]。
给定集合A={1,2,3}表示像素的色彩,元素1代表绿色,2代表橙色,3代表红色。每个像素点的色彩特征值PiV∈A,其中:i为像素索引,V为色彩值。
根据像素索引及其色彩值,将一幅地图表示为一个高维长向量。该向量的维度取决于像素的个数,向量元素为各像素对应的色彩值。将百度路况地图序列转化成长向量序列,跟踪地图每个像素点路况的变化。
图3中4个有图例标注的像素点构成道路。自左至右将像素点进行编号,分别是像素1、像素2、像素3、像素4。
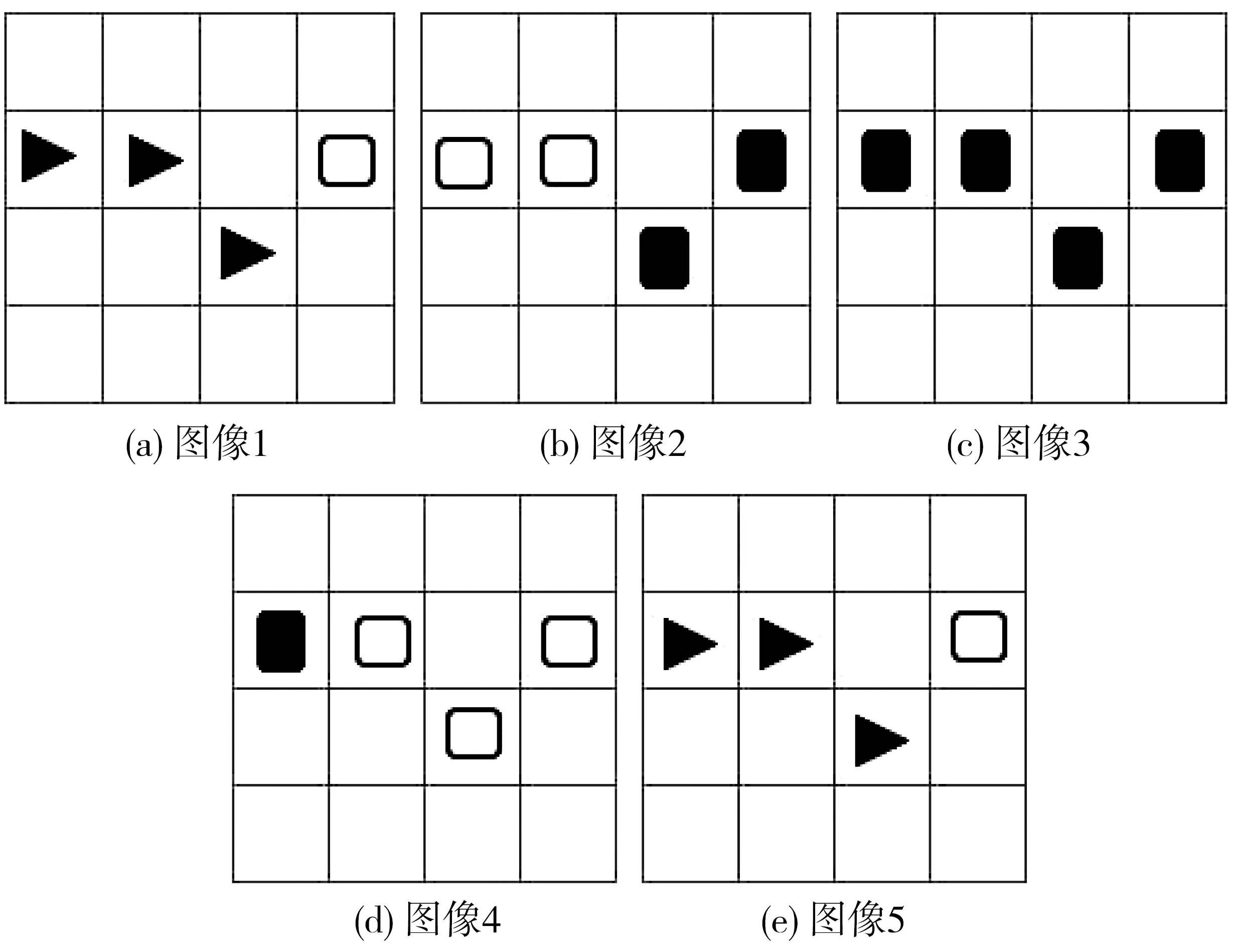
图3 图像序列示例Fig.3 Sample of image sequence
集合A可数值化图3中的色彩值,图像1~图像5的数值表示见表1。

表1 像素色彩及图像序列交通状态的数值表示Table 1 Numerical representation of pixel color and image sequence traffic status
1.2.2 基于像素色彩的整体交通状态计算
每幅路况地图都记录着某一时刻某区域整体的交通状态,可以通过一个多元线性计算式来计算该状态的分值S。为了区分畅通、缓行和拥堵3种整体交通状态,笔者将状态得分值均分为3份。
设一个红色、黄色、绿色像素分别得3、2、1分,统计得到地图中红、黄、绿3种颜色像素的个数分别为x1、x2、x3,由S=3x1+2x2+x3可计算整体交通状态得分S。
将所有地图序列所得的分值区间均分为3份,得到阈值θ1和θ2。定义地图表示的整体拥堵状态Z:
(2)
区域整体交通状态计算结果见表1。
1.2.3 双射软决策系统的构造
双射软决策系统((M,N),(G,B),U)可用于离散化的特征约简。该系统由参数集(M,N)和决策变量集(G,B)构成,通过挖掘这2个集合之间的关系,可计算参数对决策变量变化的贡献度,识别出对决策变量变化起重要作用的参数集。参数集(Mj,Nj)对(G,B)的贡献度由式(3)计算:
(3)

结合定义2,合理设定系统中的参数集和决策变量,就可以算得E。
将路网像素作为特征项,其色彩值为特征值,整体路网的交通状态为决策变量,构造一个双射软决策系统。通过计算,得到各路段对整体路网交通状态变化的影响力。根据影响力排名,锁定对整体路网交通状态变化影响力大的路段。但是,由于路网像素点非常多,其对应的特征向量维度非常高,在这样的集合中,要迅速找出特征参数与决策变量的关系,是一个挑战。GONG Ke等[14]提出了一种快速实现增量式高维数据特征选择的算法BSSReduce,该方法的计算复杂度仅与用例数量线性相关。
1.2.4 跟踪交通拥堵变化关键路段的变化
城市交通受到通勤影响,具有明显的周期性。为了便于分析,笔者以自然周为单位组织数据。视1周的数据集为一个用例集,输入双射软决策系统,以BSSReduce算法获得各像素点的影响力,关注影响力大于0的像素点,构成集合Bkeyset。
设定2个集合Kset和ΔKset,其中Kset记录迭代后的拥堵变化关键点,而ΔKset记录迭代过程中变化的关键点。

1)合并密集像素点
当Sig(pi+1,j) >Sig(pi,k),
且D(pi,k,pi+1,j) ≤r时,有
pi+1,j≈pi,k
(4)
Sig(pi,k)=Sig(pi+1,j)
(5)
式中:Sig(pi+1,j)、Sig(pi,k) 分别为2个像素点的贡献值;D(pi,k,pi+1,j)为2个像素点的距离;r为根据需要设定的距离阈值。
2)确定新的集合
(6)
(7)

1.2.5 拥堵变化关键路段的分类可视化呈现
整理得到拥堵变化关键路段的集合以及各路段对应的Sig值。为了形象地展示这些路段的位置及影响力大小,笔者设计了可视化算法,将这些路段的影响力形象地呈现在电子地图上。


将不同级别的像素点用不同的图例展示在电子地图上。
2 实例分析
2.1 数据说明
紧邻重庆南岸区四公里立交,海峡路至学府大道是重庆市工作日早高峰时段最拥堵的路段之一。笔者对四公里立交区域(图1)展开研究,图像宽度为1 366个像素,高度为768个像素,道路网络如图2。通过百度地图开放平台采集2018年12月9—31日的路况地图数据,有效图像共10 620张,其中07:00—10:00的早高峰数据有1 314张。
2.2 双射软决策系统挖掘结果记录
以周为单位,将地图数据顺序输入双射软决策系统,经计算得到各路段对整体交通状态变化的影响力。表2为对3周数据进行分析得到的Sig值排名前20的像素点坐标。计算像素点之间的切比雪夫距离,设定距离阈值r=30,对距离小于阈值的像素点进行合并整理。
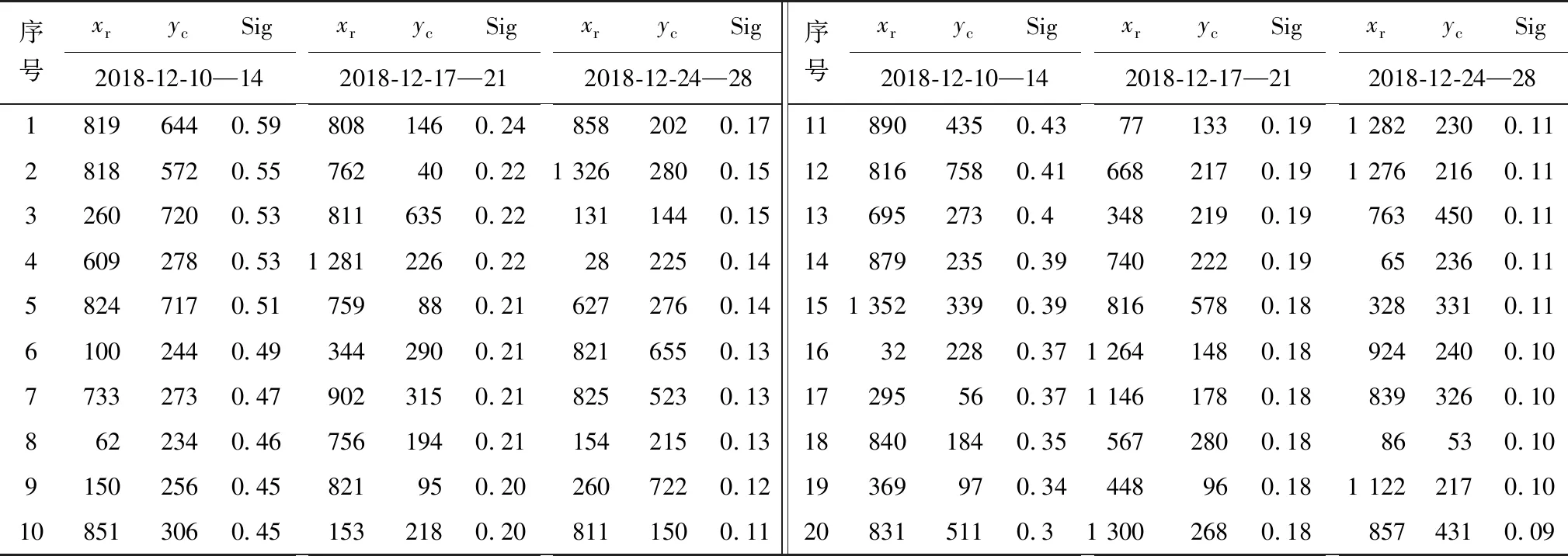
表2 根据Sig值排名前20的像素点信息Table 2 Top 20 pixels’ information ranking by their Sig values
从表3可以看出:某些点,如(819,644),(818,572),(811,635)可合并存入拥堵关键路段;而另一些点,如(1 352,399)仅出现在第1周的关键点中,可视为关键点变化集ΔKset中的元素。
根据像素色彩来统计各点拥堵出现的次数,排在前10的像素点如表3。

表3 像素点呈现红色的次数前10排名Table 3 Top 10 number of times that pixels appeared red
对比表2和表3中的像素点可以发现,出现红色次数多的像素点不一定是拥堵变化关键点,因为易拥堵的像素点位置与拥堵变化关键点的位置不一致。
2.3 分析及建议
将关键路段的影响力值均分为3类,即设K=3,降序依次用图标、、表示,结果如图4。
观察图4中拥堵变化关键路段,发现影响力靠前的路段是:①学府大道四公里至五公里路段;②海峡路至四公里立交匝道路段;③江南大道南坪隧道至四公里立交匝道路段;④万寿路路段;⑤回龙路与青龙路的交叉路口。
1)四公里立交匝道路段的拥堵是由于四公里立交匝道只有两车道,而该区域内有大量的住宅,居民早上出行需求量大,由于匝道道路狭窄形成了拥堵。因此,可在道路并道处部署交警进行适当的限流和疏导工作。
2)四公里至五公里之间的路段拥堵,原因是由于学府大道车流量大,回龙湾地区的车流并入学府大道主干道时有调头需求,调头车道位于主干道的最左侧且距离调头路口距离不到50 m,车辆需要通过2次并道才能并入调头车道,从而影响了直行车辆的通行,造成拥堵。因此,可将调头车道设为右侧车道,或将调头路口调整,使距离变长,车辆有更多的机会实现并道后调头。
3)万寿路路段是一个Y型单向车道,存在左右车道并道入4车道的现象。早高峰时期,南坪车辆出行量大,且存在大量并道行为,造成拥堵。因此,可采用多级车道信号灯控制车辆,以缓解拥堵。
通过走访重庆南岸区交警相关部门,证实了笔者对这几个路段交通情况的分析结论:拥堵变化关键点的形成与道路拓扑结构和周边设施有关。
3 结 论
1)考察了百度实时路况地图序列中道路网络的像素色彩变化,以像素点为图像特征维度,以色彩为特征值,将图像序列转化为高维向量序列;构造多元线性计算式,确定区域整体交通状态。
2)结合双射软决策系统,以基于路网像素的高维向量为特征参数向量,整体交通状态为决策变量,计算特征参数对决策变量变化的贡献度,得到了各路段的拥堵影响力。
3)应用BSSReduce算法,将像素点进行分类,并呈现在电子地图上,锁定了Sig值较高的拥堵变化关键路段。
4)拥堵变化关键车道的形成与道路拓扑结构和周边设施有关;立交匝道、掉头车道及特殊结构车道需要得到更多的关注。
5)实时路况地图可以作为数据输入,应用到交通分析领域,拥堵影响力与拥堵严重度是不一样的路段属性;基于双射软决策理论识别路段拥堵影响力,是对现有拥堵识别研究的有力补充,具有较大的实际应用价值。
猜你喜欢
工会博览(2022年5期)2022-06-30
现代电子技术(2021年1期)2021-01-17
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
上海大学学报(自然科学版)(2018年5期)2018-11-02
环球飞行(2018年7期)2018-06-27
电脑知识与技术(2018年35期)2018-02-27
中国公路(2017年11期)2017-07-31
中国公路(2017年7期)2017-07-24
中国公路(2017年10期)2017-07-21