某矿区1:1000比例尺的无人机数字航空摄影研究
2021-06-21 14:12康红星
世界有色金属 2021年4期
康红星
(中国有色金属长沙勘察设计研究院有限公司,湖南 长沙 410000)
无人机在航空摄影中的应用越来越广泛,能十分的方便、快捷且精确的完成摄影任务,为之后的测量工作提供可靠的参考依据,保证测量的准确度,值得大范围应用和进一步推广[1]。
1 项目概况
测区范围共有7个分区,界线图如图1所示。

图1 测区界线图
根据XXX的实际需求,本项目需要获取测区影像数据,完成DOM、DLG成果的生产。其中,第1分区需求比例尺为1:1000,其他分区需求比例尺为1:2000;地面分辨率均采样为0.1m。根据项目需求,本项目的主要工作有无人机航空摄影、像片控制测量、地物地貌要素调绘、航摄数据处理、相关图件输出等。具体任务量如表1所示。

表1 数据获取与生产计划面积(单位:km2)
2 无人机数字航空摄影
2.1 基本要求
2.1.1 相片重叠度
航摄分区的划分需按照地形特征进行,以分区要求为依据,航摄最低点的地面分辨率应达到0.1m以上。航向重叠度通常在60%~80%范围内,不能低于53%;旁向重叠度通常在15%~60%范围内,不能低于8%。
2.1.2 摄区边界覆盖保证
航向覆盖超出摄区边界线应达到两条基线以上。旁向覆盖超出摄区边界线通常要达到像幅50%以上;在方便对像片控制点进行施测量且不会对内业正常加密造成影响时,旁向覆盖超出摄区边界线应达到像幅30%以上。
2.1.3 航高保持
在同一条航线上,两个相邻的像片,其航高差应控制在30m以内,最大和最大航高,相差不能超过50m,而实际和设计航高之间相差不能超过50m。
2.1.4 漏洞补摄
在航摄中存在的相对与绝对漏洞都应及时进行补摄,采用前一次航摄过程中所用的数码相机进行,补摄时,航线两端需要超出漏洞以外两条基线。
2.1.5 影像质量
影像必须清晰,且层次丰富,反差适中,色调柔和;可容易分辨出地面分辨率良好的狭小地物影像,也可建立完整的立体模型。在影像上,不能存在缺陷,包括云、云影、烟、大面积反光、污点。确保因飞机地速的影响,在曝光瞬间造成的像点位移一般不应大于1个像素,最大不应大于1.5个像素。
2.1.6 平面位置与高程精度
平面位置中误差应满足表2的要求,高程中误差应满足表3的要求。

表2 平面位置中误差(单位:m)
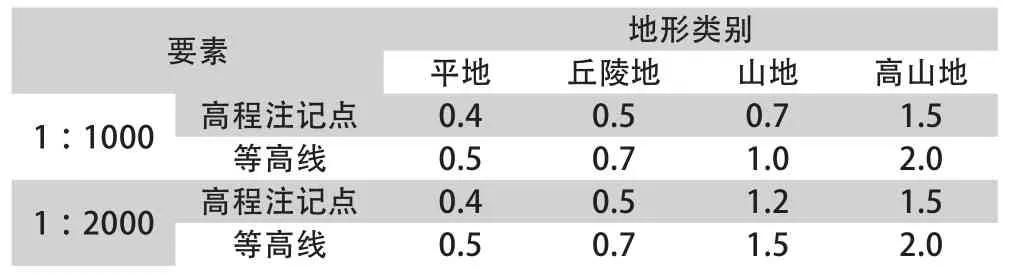
表3 高程中误差(单位:m)
2.2 航摄系统选择
2.2.1 飞行平台
飞行平台应达到以下要求:续航时间不少于1.5h;可在四级风力条件下安全飞行;巡航速度通常在120km/h以内,最快不得超出160km/h;对航路点及曝光点的存储数量应达到1000个以上;对于导航定位GPS,应达到以下要求:数据输出频率达到4Hz以上,可使用双频GPS差分定位或精密单点定位对实际曝光点的坐标进行解算[2]。
2.2.2 航摄分区划分
在对航摄分区进行划分时,应严格遵循下列基本原则:分区界线必须和成图范围线完全一致;分区中的地形高差应控制在航摄航高1/6以内;当地形高差可以满足以上要求,且可以保证航线保持直线的基础上,尽可能增大分区跨度,以覆盖整个摄区为准。
2.2.3 航摄设计计算
依据航摄相机参数、分区地形起伏、像片重叠度以及飞行安全条件等因素确定各分区基准面高度;同时计算摄区最高点重叠度、最低点地面分辨率等参数,并检验其能否达到设计要求。
2.2.4 航线生成和编辑
在地面站系统中进行航线的设计,分别将每个摄影分区的范围坐标输入到地面站软件,根据航飞设计来设置航线的间距和飞行的方向,软件可自动生成航线文件,根据需要可进行航线的局部编辑。
2.2.5 航摄时间选择
在航摄过程中,除了要有良好光照度,还要避免太大的阴影;通常情况,建议在正午前后1h之内进行航摄,在条件允许的情况下,可进行云下摄影。
2.3 航摄实施要求
2.3.1 场地选择
无人机的起飞和降落主要有两种方式,即滑起滑降落和弹射伞降落,现有无人机只有应急伞,在紧急状况下可使用伞降的方式,在条件允许的情况下优先选择滑起滑降。采用该方式时,要有长度不少于150m的平直跑道,可选择与摄区相距较近的公路或开阔工地。
2.3.2 起飞前检查
在航摄过程中,安全为第一要素,将飞机组装好后,必须做好检查与记录,在保证安全的前提下才能开始飞行。需检查的项目有:俯仰检查、滚转检查、水平设置、空速检查、高度计检查、转速检查、遥控器检查、GPS定位检查、震动测试、电池测试、数传发射对传感器的影响测试、接插件检查、风门设置检查、动态传感器数据观察、空速计系数、相机检查。
2.3.3 地面站监控
在无人机升空之后,通过地面站对无人机实际工作状态实施监控,对于地面站的工作人员,应随时检查无人机转速、飞行高度与飞行速度,当发现异常时应立即作出判断并采取有效措施解决。
2.3.4 现场数据整理和检查
航摄结束后,需在现场检查并整理航摄数据。通过检查确定曝光点数和影像数是否完全一致,如果不一致,应立即确定原因;通过检查确定航线记录值和实际飞机影像数是否完全一致。数据整理要在原始影像每张都可以打开,且每张都存储完整、不发虚、曝光适中的条件下进行。航摄完成后,需在现场填写记录表。
2.3.5 航摄补飞
以航摄鉴定表为依据,现场航摄负责人确定需要进行重新飞行或补充飞行的区域,同时组织人员进行,对鉴定表予以必要的修改及补充完善。
2.4 航摄数据预处理
2.4.1 预处理内容
①创建项目文件目录,导出影像数据文件并进行原始数据备份存档;②对影像的质量进行检查,包括清晰度检查、信息量检查、色彩、明暗、云、烟雾、重叠度、旋偏角的检查等;对存在小缺陷的影像予以辐射校正,并填写鉴定表;③对缺陷相对较大的区域实施补飞设计,并通知现场人员准备开始补飞;④制作真彩色像片索引图;⑤对项目资料进行整理,汇编其它成果。
2.4.2 航摄像片命名
根据相关技术规范,结合项目具体情况,像片的文件名主要由3位字母和9位数字组成,比如RHA01001001.jpg,具体规则如表4所示。

表4 航摄像片命名规则
2.4.3 补飞数据整理原则
①以航摄检查与修正完成后的设计文件为依据,分析补费数据,确定补飞具体类型,如替换航线、替换航片或插入航线。②当补飞为替换航线或航片时,在整理数据的过程中需将原片删除,但命名不变,将GPS点为修改成替换之后的数据。③对于插入航线的情况,航线编号应依据上一次航摄的最大航线编号顺延。
3 结论
(1)在大比例尺地形图测绘项目中,无人机数字航空摄影有很大技术优势,能有效减少人员工作量,并能提高测量精度[3]。
(2)在实际的无人机数字航空摄影过程中,应高度重视基本要求、航摄系统选择、场地选择、起飞前检查、地面站监控、现场数据整理和检查、航摄补飞、数据预处理等要点,保证摄影顺利完成,并达到预期的效果。
猜你喜欢
大众科学(2022年5期)2022-05-18
环球时报(2022-03-29)2022-03-29
资源信息与工程(2021年5期)2022-01-15
航空知识(2019年1期)2019-01-11
环球飞行(2018年7期)2018-06-27
北方文学(2017年20期)2017-08-01
北方文学·中旬(2017年7期)2017-07-27
科学与财富(2017年19期)2017-07-19
科技创新与应用(2017年5期)2017-03-16
中国新通信(2016年11期)2016-08-09