
基于Smart3D的实景真三维模型生产方法探析
2021-06-21 03:25:58杨林友安徽省第一测绘院安徽合肥230031
安徽建筑 2021年6期
杨林友 (安徽省第一测绘院,安徽 合肥 230031)
1 构建三维模型的意义
智慧城市建设方兴未艾,智慧城市是一项战略和进程,需要物联网基础设施、云计算基础设施、地理信息基础设施……。测绘是地理信息的基础,也是时空大数据的基础。位置、图像、图形是时空大数据的主体。实景三维模型数据就是其中之一。以三维模型数据模式,形象展示地面上建筑物、构筑物等的空间位置及当前权属性质和属性状态,为智慧城市的建设提供视角影像数据。形象地展示地面上建筑物、构筑物等的空间位置及当前权属性质和属性状态。为三维不动产登记管理、城市建设、矿山管理、公安等提供数据支撑。
2 实景真三维模型的应用
各地在城市化的进程中,土地资源愈来愈紧张,城市空间的利用愈来愈复杂化、规模化。传统的二维矢量数据已不能满足现代城市的城市管理。利用实景真三维模型数据,在解决模型单体化后整合、关联不动产登记二维矢量数据,进行三维不动产权籍生产。既能有效解决目前不动产登记过程中存在的空间定位困难、信息重叠等问题,又能将二维矢量数据管理升级为更直观的、立体感更强的三维数据管理模式。随着倾斜摄影测量技术的日渐成熟,探索利用倾斜摄影测量、Smart3D真三维建模技术在不动产登记管理、智慧城市建设等领域的应用,是一个热门的课题。
3 利用Smart3D构建真三维模型
3.1 前期资料准备
3.1.1 倾斜摄影
无人机倾斜航空摄影在小范围的三维模型制作是眼下常用的影像获取方式,但对大面积的三维模型制作,为了保证模型精度、为了保证倾斜摄影的分辨率和重叠度一般采用直升飞机,相机采用五个中画幅量测级PAN-U5相机。航摄分辨率为2cm~3cm(下视分辨率)。
3.1.2 影像数据预处理
使用航摄仪自配软件Capture one对影像数据进行预处理,生产出5个镜头的单幅影像数据。IMU/GPS数据处理、GPS数据解算、IMU和GPS数据联合解算、对检校场进行空中三角测量,计算偏心角以及线元素偏移值,用偏心角和线元素偏移值改正摄区每张像片的位置和姿态,得到每张像片的6个外方位元素(即像片的POS数据)。
3.1.3 像控点测量
为提高模型的进度,需实地测量一定数量的像片控制点,像控点的布设需依据航空摄影测量技术要求均匀布设。倾斜摄影时载机搭载高精度IMU/GNSS定位定姿系统辅助航空摄影,实时记录和解算每张像片的外方位元素,在满足三维模型精度的前提下,可大量减少外业像片控制点的布设数量,减轻外业劳动强度。因倾斜摄影分辨率高像机多、要求的像片重叠度又较大,所以像片数量庞大。为保证模型的精度拟每4km均匀布设6个像控点、1个检查点。点位应选择航片上清晰易判别的固定点,依据等级控制点施测的精度要求,实施野外高精度像控点测量。像控点点位精度按下表执行:
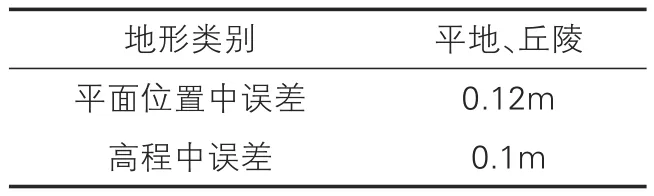
像控点点位精度执行
3.1.4 空三加密
传统的航空摄影测量空中三角测量是利用光束法进行区域网平差,像片的俯仰角和横滚角接近为零是其数学模型的基础。因而无法处理倾斜摄影获得的影像数据。需专业的多视角航空摄影测量空三加密软件,进行影像的联合空三加密平差。流程图如图1所示。

图1 空三加密流程图
各方向的中误差与最大误差限差,以及控制点的联合区域网平差应符合规范要求。
3.2 Smart3D三维重建
基于一个下视四个倾斜共五个不同焦距的镜头,获取的同一时点的连续影像,结合空三加密获得的每张像片的外方位元素成果,在Smart3D三维建模软件中,经如图2操作完成三维模型的生产。

图2 Smart3D三维模型生产
Smart3D能从获得的连续倾斜影像中生成最逼真的实景三维模型,在三维模型重建过程中已经实现了全自动计算,会依据内部算法规则,自动匹配像对,自动筛选像对,自动生成带有坐标(X、Y、Z)信息的密集的模型表面点集。自动构建不规则三角网TIN结构,自动检测优化三角网,同时将自助纹理映射错误的图像匹配进行删除和修复,并基于高程模型(DEM)数据以及内在的几何关系,剔除不合理的三角网,并将TIN模型进行平滑处理,达到最佳的模型视角效果。最后根据三维TIN的空间位置信息,自动寻找建筑物四周的倾斜影像信息匹配到白体模型上,完成模型纹理的构建,最终还原出最真实的实景真三维模型。
3.2.1 区块划分
因数据量大,模型的成果数据是按照分区分别进行计算和存储的。倾斜摄影获取的影像多、数据量庞大、计算复杂,再加上普通计算机的计算能力有限,必须对测区进行分块。结合高程模型(DEM)数据,依据配置的计算机的内存、计算节点的数量和影像数据量的大小,将整个测区按照合理的大小进行划分(2cm分辨率倾斜摄影一般情况下按每60m分块),将计算任务分配到不同的节点,在充分利用资源的前提下,提高作业效率。
3.2.2 建立三维像对
选择需要处理的区块,生成所需要影像的金子塔文件。
结合航摄过程中像机搭载的高精度IMU/GNSS定位定姿辅助航摄系统获取的POS数据,以及各个航摄相机的位置参数,根据每两张相邻下视像片摄影中心点之间的位置关系,同名地物来匹配像对。
在执行倾斜摄影时都有航向和旁向重叠的要求(航向和旁向均为60%要求),同一地物影像可以出现在5张~30张影像上。为此在程序运行前,先设置好组成像对的两张像片摄影中心长度限值。曝光间隔与航线间距的最小值≤摄影中心间间距≤曝光间隔与航线间距最大值的2倍。像对文件生成后,需逐个检查各个像对是否满足规范或技术设计书要求。
基于空三加密平差计算得出的每张像片主点即摄影中心的6个外方位元素成果和像机安置的位置关系,Smart3D软件可以依据同名影像自动寻找合适的相邻两张影像组成三维像对。
3.2.3 TIN网优化
获取的高分辨率倾斜影像,Smart3D可通过计算生成基于倾斜影像的超高密度点集即点云,并由此生成基于倾斜影像纹理的高分辨率实景真三维模型,对真实场景的还原已经达到了全要素级别。Smart3D软件内嵌了多种高级智能算法,可以自动构网,并且能够自动检测不规则的三角网,自动对不合理的三角网表面进行优化,剔除不合理的三角网。对平缓表面和模型复杂表面的三角网密度自动进行简化和保留处理。
合并模型点云文件,创建TIN网的三维模型,同时还要进行下列操作:
①调整点云密度使其三角网的尺寸尽量与原始影像地面分辨率相匹配;
②去掉点云中发生突变、不连续的点;
③通过对密集点云演示的表面变化的分析,降低平缓地区三角网密度。
3.2.4 白体三维模型创建
利用处理后的不规则三角TIN网,创建生成白体的三维模型(即初期模型)。
3.2.5 纹理渲染、匹配
根据优化的三角网结果,并结合关联的原始影像和拍摄的立面照片信息,为每个三角形建立一一对应的纹理信息。同时把纹理信息和模型之间的关联保存在关系表中。在进行纹理映射时需均衡色彩,以像素为单位设置纹理大小,一般情况下按影像长边的1.5倍设置。为使模型色彩均衡,将带纹理的模型建立更多细节和层次,便于优化文件组织结构。将得到的结构模型文件输出为obj、osg(osgb)等通用兼容格式,能够方便地导入目前各种主流GIS应用平台。
3.2.6 模型编辑、修改和成果整理输出
由于建模是由计算机全自动完成,因此不可避免会出现一些问题区域,主要是以下几种类型:
①由于拍摄视角盲区造成的漏洞:比喻因房檐过大导致在航拍时,房檐底下信息丢失引起的漏洞;建筑物密集导致建筑物侧面被遮挡而引起的信息丢失等;
②水体表面、反光严重的玻璃楼体表面,容易产生模型空洞、水面不平;
③由于影像质量问题引起的匹配错误;
④植被、路灯、广告牌等细小、结构单薄的物体,容易导致结构不完整、漂浮空中等现象。
对于以上问题,可以利用第三方软件 photoshop、Erdas imagine、Geo⁃magic等软件进行人工干预编辑,例如水面不平及漏洞修补、悬浮物删除、道路不平整修复、建筑变形及遮挡修饰等,实现TIN网的修复和重构。如部分区域存在拍摄盲区,采用在地面补拍照片的方式重新建模。另外,Smart3D可以对指定的区域进行TIN网的自动内插平滑处理,解决表面漏洞问题。
所有成果数据按要求进行组织存储。
3.3 精度统计
实景真三维模型数据是一种全新的地理信息数据,地理信息数据是有精度要求的:
位置精度:在模型上采集已实测坐标的地面检测点的内业坐标(共77个点)与实测坐标进行比对:
Ms(高精度)=±0.11m、Mh(高精度)=±0.073m。
几何精度:模型与实地核对没有变形。
纹理精度:表面纹理符合现场的真实情况。
4 结语
目前真三维模型制作技术比较成熟,ESRI、SkyLine等多种处理软件都能满足要求,有各自的优缺点。本文主要就基于Smart3D软件,通过直升飞机平台搭载五个中画幅量测级PAN-U5相机,获取地面分辨率为2cm~3cm(下视影像)连续的多视影像,结合外业控制、空三加密,探索快速构建实景真三维模型的方法。结果证明Smart3D三维建模方法具有高度的自动化和快速建模的特点。模型的位置精度、几何精度均能满足1:500地籍图,图上地物点中误差≤图上0.5mm的精度要求;纹理精度也较符合现场的真实情况。在解决模型单体化和分层分户的技术问题后,结合不动产二维矢量数据就可以完成分层分户的定位和属性赋值。直观、高效地服务于不动产管理登记,满足城市不动产管理需求。
猜你喜欢
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
现代测绘(2018年3期)2018-09-13 09:34:46
企业科技与发展(2018年5期)2018-09-10 00:20:39
科学与财富(2017年19期)2017-07-19 10:59:15
长江工程职业技术学院学报(2017年2期)2017-06-19 18:49:05
智能计算机与应用(2017年2期)2017-05-04 00:45:34
星星·散文诗(2015年34期)2015-10-26 19:25:18
长江工程职业技术学院学报(2014年4期)2014-11-30 02:41:40
