陀螺仪的发展与展望
2021-06-19 08:15史文策许江宁林恩凡
导航定位学报 2021年3期
史文策,许江宁,林恩凡
(海军工程大学 电气工程学院,武汉 430033)
0 引言
陀螺仪,简称陀螺,是用来测量、控制物体相对惯性空间角运动的惯性器件。陀螺仪技术自问世以来,发展至今已有160余年历史,在导航、制导与控制等领域得到了广泛应用。随着科学理论的进步和工艺水平的不断提高,基于不同原理的陀螺仪相继出现,各国对陀螺仪精度、稳定性、可靠性、成本、体积等性能指标的不懈追求,极大地促进了陀螺仪技术的发展。
陀螺仪按照工作原理可划分为:基于旋转质量陀螺效应的转子陀螺仪;基于萨奈克效应的光学陀螺仪;基于哥氏效应的振动陀螺仪;基于现代量子力学技术的原子陀螺仪[1-2]。
1 陀螺仪的发展
1852年,法国物理学家莱昂·傅科(Léon Foucault)提出了利用陀螺仪指向的设想,并成功研制出世界上第一台傅科陀螺仪(如图1所示),有效地验证了地球自转运动,开启了人类对工程实用陀螺仪的研究与设计。1908年,德国科学家赫尔曼·安许茨-肯普费(Hermann Anschütz-Kaempfe)设计了一种单转子摆式陀螺罗经,该系统可以凭借重力力矩进行自动寻找北方向,解决了当时的舰船导航问题。第二次世界大战期间,德国利用陀螺仪为V-2火箭装备了惯性制导系统,实现了陀螺仪技术在导弹制导领域的首次应用[3]。
图1 傅科陀螺仪
20世纪50年代,转子陀螺仪开始出现,美国麻省理工学院(Massachusetts Institute of Technology, MIT)的查尔斯·施塔克·德雷珀实验室(Charles Stark Draper Laboratory),采用液浮支承技术,研制出单自度液浮陀螺仪(fluid floated gyroscope, FFG),使得陀螺仪的精度达到了惯性级要求。20世纪 60年代初,美国人罗伯特·克雷格(Robert Craig)研制出了动力调谐陀螺仪(dynamically tuned gyroscope, DTG),埃卡尔福特公司研制的SKN-2416、SKN-2610、MODⅡ等型号产品,在战术导弹及军用飞机等平台进行了成功应用[4]。1964年,美国最先研制出静电陀螺仪(electrically suspended gyroscope,ESG),并于1979年首次为“三叉戟”弹道导弹核潜艇装备了静电陀螺监控器,使得潜艇的导航能力出现了质的飞跃。
20世纪60年代,光学陀螺仪的出现是惯性技术领域的一场重大变革。1963年,美国斯佩里公司最先研制出激光陀螺仪(ring laser gyroscope,RLG)。随后经过十余年的不懈努力,美国霍尼韦尔公司于1975年和1976年分别将激光陀螺仪应用到飞机和战术导弹;1982年,该公司利用GG-1342型激光陀螺仪,为美国海军研制出了第一台用于舰艇的高精度导航设备。光纤陀螺仪(fiber optical gyroscope,FOG)是出现稍晚于激光陀螺仪的另一类光学陀螺仪,与激光陀螺仪相比,FOG具有体积更小、成本更低、便于批量生产等显著优势,迅速获得了各大陀螺仪生产商的青睐。
进入 20世纪 90年代,随着微机电和量子技术的不断发展,以微机电系统(micro electro mechanical system gyroscope, MEMS)陀螺仪、半球谐振陀螺仪(hemispherical resonator gyroscope,HRG)为代表的振动陀螺仪和以核磁共振陀螺仪(nuclear magnetic resonance gyroscope, NMRG)、原子干涉陀螺仪(atomic interference gyroscope,AIG)为代表的原子陀螺仪等新型陀螺仪得到了快速发展,掀开了陀螺仪技术的崭新篇章。
2 新型陀螺仪
2.1 微机电系统陀螺仪
MEMS陀螺仪,主要采用微/纳米技术,将微机电系统装置与电子线路集成到微小的硅片衬底上,通过检测振动机械元件上的哥氏加速度来实现对转动角速度的测量。MEMS陀螺仪主要包括角振动式、线振动式、振动环式及悬浮转子式四种类型[5]。
20世纪 60年代,国外开始对 MEMS陀螺仪进行研究,直到1988年,德雷珀实验室才成功研制出世界上第一台MEMS陀螺仪。之后数十年,MEMS陀螺仪技术得到了国内外的高度重视。英国贝宜(BAE)系统有限公司,采用MEMS谐振环陀螺仪实现了 MEMS 惯性测量单元(inertial measurement unit, IMU)的系列化,如图2所示。

图2 英国BAE公司研制的MEMS IMU系列化产品
MEMS IMU系列化产品在高速旋转弹、中程导弹和美国155 mm制导神箭炮弹等武器系统中,得到了成功应用[6]。日本硅传感系统公司对MEMS谐振环陀螺仪的研制能力处于世界顶尖水平[7]。2019年,霍尼韦尔公司公布了其用于平台稳定的MEMS面外陀螺仪性能,角度中值的零偏稳定性优于0.2(°)/h,随机游走优于0.0060.5(°)/h ;同年9月,该公司推出了旨在取代光纤陀螺仪的两款新型HG系列MEMS陀螺仪[5]。
我国在MEMS陀螺仪领域研究起步较晚,经过近些年的努力,在MEMS陀螺仪设计技术、制作工艺技术、电路小型化技术等关键环节上不断取得突破,目前,多家单位研制的工程样机已基本满足应用要求,但是与先进的国外产品相比,综合性能上仍有较大进步空间。
2.2 半球谐振陀螺仪
半球谐振陀螺仪是一种固态波陀螺仪,它通过半球谐振子径向振动产生的驻波沿环向的进动效应来感测基座的旋转,进而确定旋转角度或速度。半球谐振陀螺仪按照结构形式可分为两件套构型和三件套构型[8],按照工作模式可分为全角模式和力平衡模式[9]。
半球谐振陀螺仪开始出现于 20世纪 60年代。自问世以来,备受各国关注,随着电子学技术和制作工艺水平的提高,半球谐振陀螺仪性能也不断提升。目前,美国、俄罗斯和法国在半球谐振陀螺仪的研制中处于领先地位。美国诺格公司研制的哈布尔(Hubble)HRG,其零偏稳定性达 0.000 08(°)/h ,角度随机游走达0.000 010.5(°)/h ,是当前公开报道中,性能指标最高的半球谐振陀螺仪[10]。俄罗斯米亚斯梅吉科科研生产所,利用其独有的离子束调平技术,很好地促进了半球谐振陀螺仪精度的提升[11]。法国赛峰电子与防务公司研制的、以 HRG克里斯特尔(Crystal)TM为基础的纯惯性导航仪奥尼克斯(ONYXTM),是当今世界上精度最高、体积最小的纯惯性导航仪[12],ONYXTM的结构如图3所示。
图3 法国赛峰电子与防务公司研制的ONYXTM纯惯性导航仪
我国自 20世纪 80年代起,开始对半球谐振陀螺仪展开研究,起步阶段受各种原因影响,发展相对缓慢,直到“十五”期间,中国电子科技集团第 26研究所与俄罗斯开展技术合作,于 2002年成功研制出了我国第一台力平衡模式 HRG样机,之后,其发展逐渐步入快车道,目前该所已建成一条半球谐振陀螺仪批量生产线,研制的力反馈式半球谐振陀螺仪的性能指标,满足了空间高精度、长寿命卫星的使用需求[13]。2017年和2018年,上海航天控制技术研究所研制的半球谐振陀螺仪,分别成功应用到了通信技术试验卫星二号和高分五号卫星上,实现了我国自主研发的半球谐振陀螺仪在空间领域的实际应用[14]。国防科技大学对半球谐振陀螺仪的谐振子振动特性检测、温度影响以及全数字电路设计等方面进行了深入研究,并于2019年成功研制出微半球谐振陀螺样机[15],如图4所示。
图4 国防科技大学研制的微半球谐振陀螺样机
2.3 核磁共振陀螺仪
核磁共振陀螺仪是通过敏感原子自旋在静磁场中拉莫尔进动的频率变化来确定运载体的转动的,是一种基于核磁共振原理的全固态陀螺仪[16]。
20世纪60年代,欧美先进国家开始对核磁共振陀螺仪技术展开研究并取得了阶段性成果。但是到了 20世纪 80年代,由于遭遇技术瓶颈和光学陀螺仪的迅速发展等多重原因,核磁共振陀螺仪发展出现停滞。直到21世纪初,随着量子技术理论体系不断完善,核磁共振陀螺仪再次进入人们视野。2005年,美国国防先进研究计划局(Defense Advanced Research Projects Agency, DARPA)在“基于微技术的定位、导航与时间系统”项目中,支持诺格公司开展相关技术研究,历经了四个阶段,2014年该公司成功研制出体积为5 cm3,零偏稳定性为0.01(°)/h的核磁共振陀螺原理样机(如图5所示),并于2017年构建了惯性导航系统[17]。

图5 美国诺格公司研制的核磁共振陀螺原理样机
“十二五”期间,我国开始研制核磁共振陀螺仪,北京航空航天大学、北京自动化控制设备研究所、国防科学技术大学等科研机构先后投入到核磁共振陀螺仪的研制工作并取得阶段性成果,大幅推进了我国相关技术的发展。
2.4 原子干涉陀螺仪
原子干涉陀螺仪,又称冷原子陀螺仪,其工作原理不同于核磁共振陀螺仪,而是基于物质波萨奈克效应[18]。原子具有波粒二相性,其物质波属性经激光深度冷却后将变得明显,通过物质波的干涉现象,可以量测运载体的角速度。由于原子的物质波波长远小于光波且速度远小于光速,原子干涉陀螺仪的理论精度可达光学陀螺仪的 1 × 1 0-10倍[19]。
1991年,美国斯坦福大学朱棣文小组,首次观察到了原子干涉仪的陀螺效应,由于原子干涉陀螺仪的巨大精度潜力,引起了美国、法国和德国等发达国家的密切关注。2003年,DARPA制定了利用超冷原子干涉原理实现高精度惯性导航系统研究计划,在该计划支持下,2019年,奥森塞(AOSense)公司研制的原子干涉陀螺仪精度达5× 1 0-6(°)/h。2018年,德国莱布尼兹大学构建了包括冷原子干涉陀螺仪在内的超高精度惯性传感器仿真平台,展示了冷原子干涉传感器应用于惯性导航系统的潜力[12]。
近年来,我国也加紧了对原子干涉陀螺仪技术的研究,目前已有多家科研单位和高等院校开展了冷原子陀螺仪的技术研究工作,包括清华大学、中国科学院武汉物理与数学研究所、北京航天控制仪器研究所和华中科技大学等。
3 陀螺仪的展望
通过阅读研究近年来国内外相关文献资料,对不同原理的陀螺仪性能指标进行比较分析可得表1,并可以此为基础展望各类型陀螺仪的未来发展趋势。
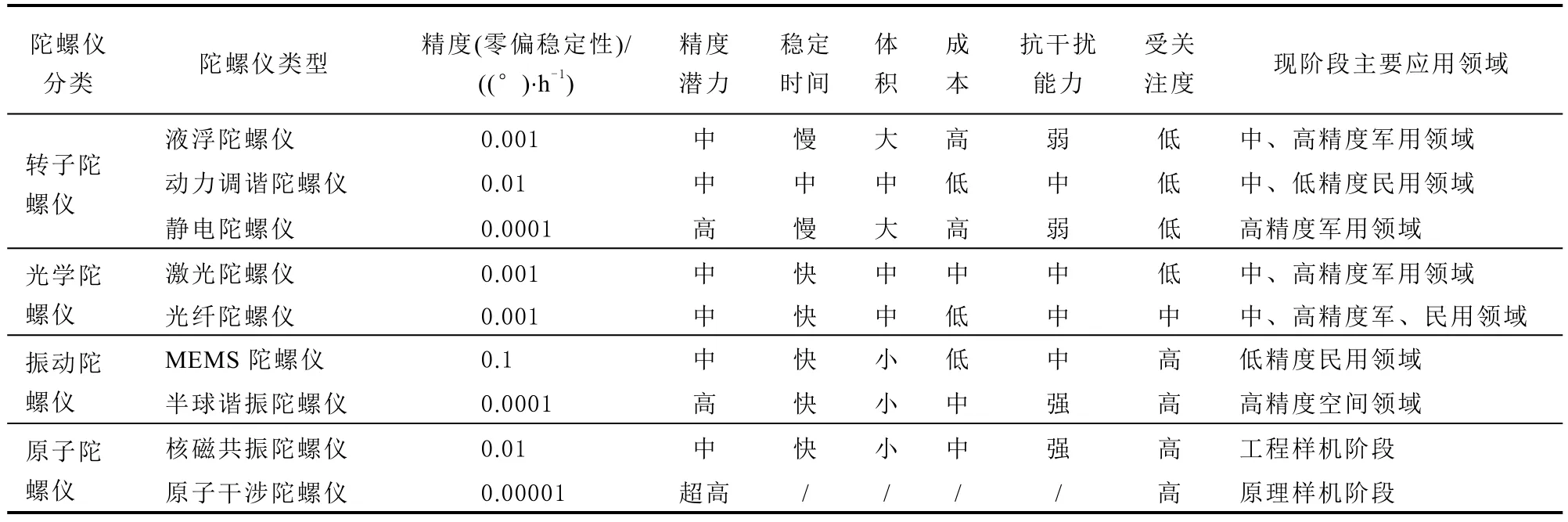
表1 不同陀螺仪的性能指标对比
3.1 转子陀螺仪
液浮陀螺仪经过几十年的发展,技术上已相对成熟,目前主要作为敏感传感器应用到武器系统上,以实现随动跟踪与制导,但在降低温控装置功耗和噪声等方面,仍有提升空间。动力调谐陀螺仪,在20世纪70年代到20世纪90年代被广泛应用,但随着光学陀螺仪技术的出现和发展,其各方面性能指标均不占优势,在各领域逐渐被光学陀螺仪所取代,目前国内外已基本停止了对动力调谐陀螺仪的研究。静电陀螺仪仍是目前实际应用中,精度最高的陀螺仪,但由于其工艺复杂、成本昂贵、抗干扰能力差等缺陷,如今仅在高精度惯性导航系统中继续应用,受关注度较低,各国正努力寻求其替代品,未来进一步发展的空间相对受限。
3.2 光学陀螺仪
光学陀螺仪因其精度高、稳定性高、体积小、抗干扰能力强等优势,是目前捷联式惯性导航系统中使用的主流产品,在市场中仍占据着主导地位。激光陀螺仪近年来不断朝着高精度、小型化、低成本的方向快速发展,但如何更有效地减小闭锁效应,更好地提升激光陀螺仪的精度仍是亟待突破的难题。光纤陀螺仪虽然晚于激光陀螺仪出现,但发展势头迅猛,美国、法国、俄罗斯和日本等发达国家,研制的新产品不断涌现,满足了不同领域的实际应用需求,下阶段,融合多种技术,从精度、稳定性、体积和成本等方面提高光纤陀螺仪的整体性能,并采用有效手段克服外界环境的影响,将是光纤陀螺仪的重点研究方向。
3.3 振动陀螺仪
MEMS陀螺仪因其体积小、成本低、易批量生产等优势,现阶段已基本占据低精度市场,随着工艺水平、计算机技术和数据算法的不断发展,其精度性能有望实现质的突破,进入惯性级陀螺仪应用领域。半球谐振陀螺仪较好地满足理想惯性传感器的性能指标,在成功应用到空间领域的基础上,向航海领域的推广已成为必然趋势,例如,法国已将半球谐振陀螺仪作为新一代海洋导航定位系统的主要惯性导航设备,赛峰电子与防务公司基于 HRG Crystal技术研发的布卢·瑙特(Blue Naute)系列惯性导航系统,已开始应用到工程船舶、科考船和海警船等载体上[20];另外,结合新型制作工艺,大力开发基于MEMS技术的微半球谐振陀螺仪(micro-HRG, MHRG)也是未来的热点研究方向。
3.4 原子陀螺仪
由于各国的高度关注,原子陀螺仪技术不断取得突破性进展,已开始逐渐从实验室步入工程化并最终通往产业化。核磁共振陀螺仪具有体积小、功耗低、抗干扰能力强等显著特点,与MEMS工艺技术相结合,有望实现芯片型惯性级陀螺仪,并以捷联式方案应用到微小型战术导弹、微小卫星、小型飞行器和自主式水下航行器等装备上。原子干涉陀螺仪具有超髙的理论精度,特别适合作为高精度平台式惯性导航系统的传感器,应用到战略武器装备上,但目前来看,原子干涉陀螺仪距离最终产业化应用仍面临许多技术困难,需要做好中长期的规划部署。
4 结束语
陀螺仪作为惯性技术体系的重要一环,是惯性导航系统中的核心传感器,其技术的更迭前进与惯性技术的发展需求密不可分。转子陀螺仪拉开了陀螺仪工程化应用的序幕;光学陀螺仪具有里程碑的意义,在捷联式惯性导航系统中的成功应用,大幅改善了陀螺仪精度与稳定性、体积之间的矛盾;振动陀螺仪和原子陀螺仪等新型陀螺仪,在现阶段展示出了巨大潜力,正处于高速发展状态。陀螺仪技术对国家综合定位、导航、授时(positioning, navigation and timing, PNT)体系的建设有着重要意义,未来将不断向着高精度、高可靠性和小型化、低成本两大方向迈进,对陀螺仪技术的持续探索研究,仍将是国内外广大科技工作者密切关注的焦点。
猜你喜欢
科技创新与品牌(2022年7期)2022-11-15
电工技术学报(2022年20期)2022-10-29
导航定位学报(2022年4期)2022-08-15
北京航空航天大学学报(2022年6期)2022-07-02
中国典型病例大全(2022年12期)2022-05-13
北京航空航天大学学报(2021年9期)2021-11-02
卷宗(2017年1期)2017-03-17
中学物理·高中(2016年4期)2016-05-11
红领巾·成长(2009年10期)2009-12-02
中学生英语·中考指导版(2008年7期)2008-12-19