基于Arduino的绘画教学机器人
2021-06-16 16:43刘璟瑶杨斌陈涛朱策梁永超
电子技术与软件工程 2021年4期
刘璟瑶 杨斌 陈涛 朱策 梁永超
(天津市南开大学滨海学院 天津市 300270)
1 引言
现今,随着各种先进技术装备的应用普及以及相关国家政策的扶持,贫困偏远地区的生活越来越好,但在保障物质生活的前提下,似乎却忽略了青少年的美育教育,贫困地区教育师资匮乏、教育水平参差不齐、教育区域不公平问题十分严重。目前社会十分注重美育教育,国家也大力开展了扶贫工作,要求加大对乡村教师队伍建设的倾斜和支持力度,继续实施乡村教师发展协作攻坚行动。智能绘画教学机器人以Arduino 为核心,结合图像识别等技术实现了更加自然科学的人机互动教学模式,代替了专业美术老师的角色。通过精密的算法提升绘画效果,并在教学过程中引入趣味小故事,使孩子们能在美术学习的同时感受其中的快乐,使偏远地区孩子们获得学习美术基础教育的机会。
2 机器人总体设计
绘画教学机器人是由图像处理部分、机械控制部分、图像处理算法组成。首先将摄像头采集的三通道彩色图像转换为单通道的灰度图像,采用自适应阈值算法,将得到的灰度图像转换为二值图像,然后使用图像细化方法提取二值图像的骨架信息,控制部分由Arduino 承担,Arduino 接收图片像素信息后,解析为驱动电机的Dir 信号和Step 信号,由I/O 口控制ULN2003,驱动左右两部步进电机转动通过两部步进电机的正反转动作,带动笔架部分,机器人进行自主绘画。系统原理图如图1 所示、流程图如图2 所示。
3 机器人硬件设计
3.1 笔架控制设计
绘画教学机器人用Arduino 控制两个步进电机驱动ULN2003,其机械结构主要由画笔支持部分和悬吊牵引部分组成。画笔的支撑部分相当于机器人的手掌,用来固定其装置。画笔支持结构模型如图3 所示。该装置通过固定支架连接,使画笔能准确地保持在固定支架的中间位置,并能随着位置的变化而改变开闭角度。画笔固定支撑设计,可调整画笔重心,使画笔稳定,作画时画笔直径显小,从而保证悬浮牵引部分的平衡,避免晃动。
笔架控制部分由步进电机、舵机、画笔支撑部分组成。与传统的绘图机器人相比,本设计在完成垂直平面二维绘图操作的基础上,创新了机器人的灵活性和实用性。现有的绘图机器人具有固定的绘图支点和有限的工作区域,影响了其应用范围。本设计的最大优势是,机器人的机械部分可以拆卸和组装,牵引电机十分灵活,可以安装在任何绘图区域,这样机器人的吸引范围并不局限,并且绘图区域的大小不再是一个限制因素而影响绘画机器人的发展。
3.2 电机控制部分设计
本设计的核心控制器是Arduino,晶体振荡器选择16MHz。ULN2003 也是一个7 路反向器电路,即当输入端为高电平时,ULN2003 输出端为低电平;当输入端为低电平时,ULN2003 输出端为高电平。
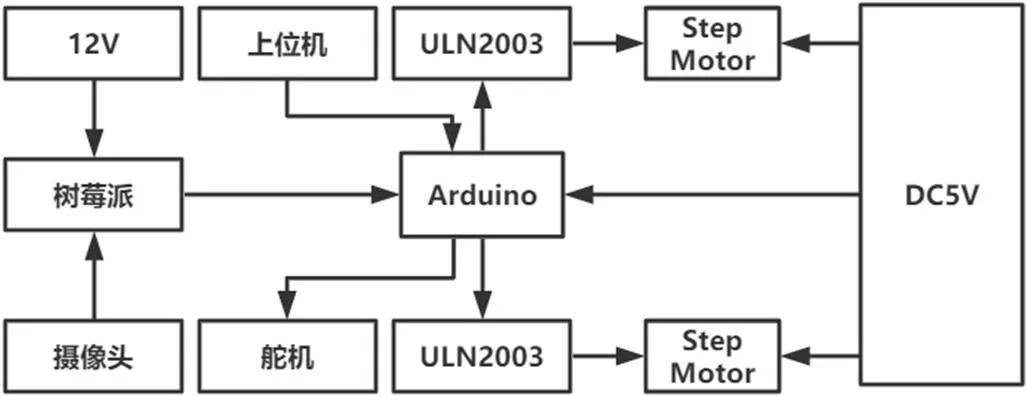
图1:系统原理图

图2:程序流程图

图3:画笔支持结构模型

图4:ULN2003 引脚功能说明图

图5:8BYJ-48 步进电机结构
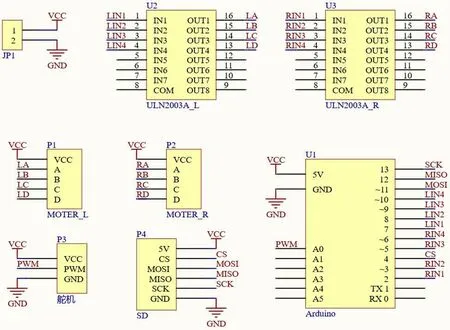
图6:绘画教学机器人部分原理图
电源部分采用5V 供电,DC 5V 直接为步进电机供电,另外DC5V 经过稳压模块输出DC5V 电压为Arduino 供电,正负极分别连接ArduinoMega2560 的VIN 和GND 引脚。根据设计需求和硬件配置要求,我们采用28BYJ-48 步进电机,其步进角为5.625/64 度。如果需要转动1 圈,那么需要360/5.625*64=4096 个脉冲信号。
步进电机变速比64:1,绕线轴直径35mm,绘图笔的平均移动速度13.7mm/秒,一般速度 9~27mm/秒。(笔架距离电机的不同速度会变化,横移竖移的速度也不同。)图4 图5 分别为ULN2003 引脚功能说明图与28BYJ-48 步进电机结构;图6 为绘画教学机器人的部分原理图。
3.3 图像处理

图7:图像识别
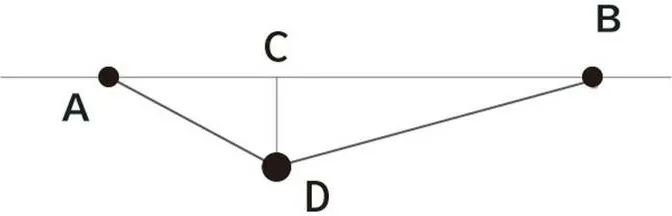
图8:程序设计原理图1
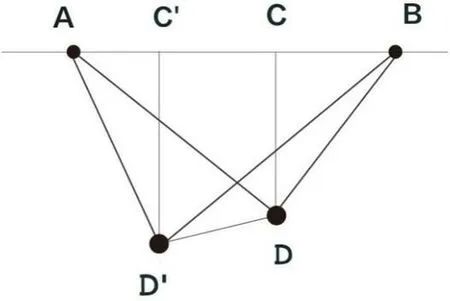
图9:程序设计原理图2

图10:拉线出口位置
轮廓是图像的重要特征之一,图像轮廓的提取是实现精准画图的关键技术。由于物体与背景在某些图像特征上存在差异,我们采用了OpenCV 进行图片边缘检测,并使图像分离出来,为了能获得更好的图像效果以及同时兼容OpenCV,所以我们采用了乐视体感摄像头连接树莓派和Arduino。
整个图像处理流程为,首先将摄像头采集的三通道彩色图像转换为单通道的灰度图像,采用自适应阈值算法,将得到的灰度图像转换为二值图像,为了得到单像素宽的图像轮廓,我们利用了图像细化方法提取二值图像的骨架信息。
为了使绘制出来的图像处于画布中心,我们对图像进行位置限定和裁剪,只保留有效的图像部分,最后我们将得到的图像与参考坐标进行映像,从而得到Gcode 文件,下一步Arduino 将控制电机按着Gcode 代码进行绘图。图7 为摄像头识别后的图像。
4 机器人程序设计
4.1 计算原理
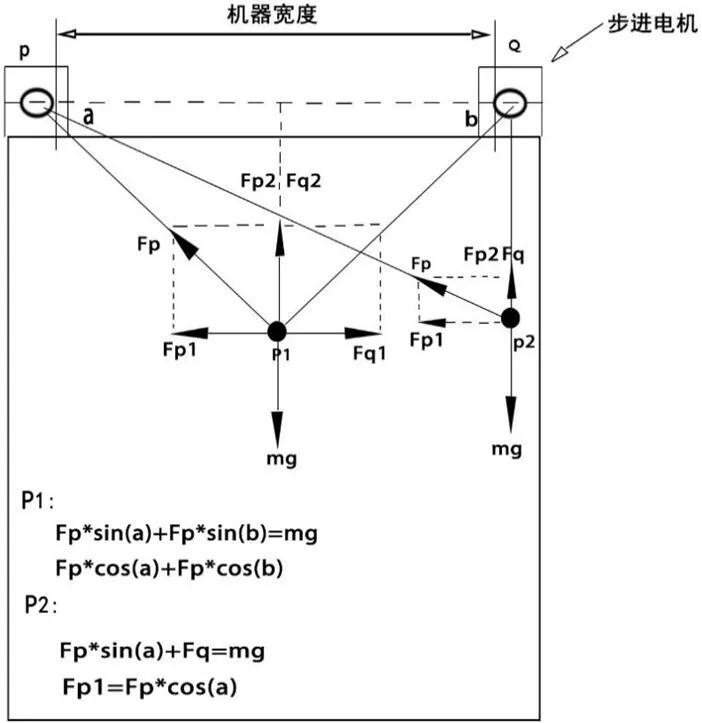
图11:绘图受力参数分析图

图12:区域说明

图13:最终实现结果
机器人使用了相对好控制的步进电机,力道可以满足其需求。一般空调的导风板都是用这种电机拉动的。接好线用程序就可以控制它转,一行代码,转一下,循环2048 次,转一圈。如果用 35mm 的线轴,转一步,可以拉动 0.027mm 的线。
如图8 所示,两个步进电机在 AB 点,电机转动线轴,收放两条线,笔就会跟着移动。只要让 A 电机拉线,B 电机放线,笔就可以移动到要的位置。
要从 D 移动到 D’的位置,只需要计算出AD 和 AD’的差,BD 和 BD’的差,计算放线和收线的长度,最后计算电机正转或是反转、所转的步数。如图9 所示。
4.2 画笔移动过程
两条拉线拴在笔架上,另一端绕在线轴上,由步进电机驱动,放线或收线。拉线在支架的出口位置是AB 点(如图10 所示)线轴到支架的距离不用计算。此两点的距离是程序中的X_SEPARATION 参数(单位mm)。需要测量实际宽度后修改X_SEPARATION 值。此段中心为X 轴原点,原则上左负LIMXMIN、右正LIMXMAX。
开机时笔架停留的位置是Y 轴原点。笔架到AB 的垂直距离为LIMYMIN,数值需要提前测量好,并且每次开机尽量保证让笔尖在此位置,误差过大会产生畸变,X 轴皆然。向下是LIMYMAX,只要线轴和幅面足够长,LIMYMAX 可以无限制大。一般情况下,让笔在画面中心,将LIMYMIN 和LIMYMAX 设置的一样大。
为了能够灵活绘制任意图形,需要对绘图机器人的移动进行精细控制。所以需要对绘图机器人进行几何结构建模。我们以两个悬挂点以及悬挂点到笔架的距离作为参考,可以得到他在画布上的参考坐标系,从而我们可以确定电机的转动角度与绘图机器人运动参数之间的关系。其绘图受力参数分析图如图11 所示。
图像并不能无限扩大,理论上图像只受AB 点的距离影响,越宽图像越大。实际上,并不能如此理想。笔架离AB 的垂直距离越近,电机的拉力就要越大,最后接近无限大。很显然步进电机达不到。所以图像的最高点不能达到LIMYMIN 的位置。也不能太靠两侧,因为横相的拉力又变得过于微弱。所以最佳的绘图区域见下图标注。超出最佳区域后,会有一定的畸变,越超区畸变越大,如图12 所示。
5 最终结果、功能实现
我们最终实现了绘画教学机器人的功能,其以Arduino 为核心,用夹子将两个电机夹在白板上,在电机上缠绕上绳子,引出两条拉线拴在笔架上,另一端绕在线轴上,由步进电机驱动,放线或收线,控制笔绘画。用摄像头连接树莓派和Arduino,摄像头识别图像后从而在白板上最佳区域内绘制出相应的图案。
该机器人的特色就是:电控部分与机械部分可拆卸不受绘图区域大小的影响。步进电机体积小,接线方便,程序简单,兼容性强,导电能力好,应用广泛,耐用寿命长。两侧有绕线架可粘贴在任何墙壁、画板的上角,无需登梯爬高,并且摄像头能够自主识别图案,进行绘画。我们积极响应国家政策,很好地将绘画机器人运用到教学白板上,更加智能化、专业化地教授孩子们进行绘画创作,激发孩子们的绘画兴趣。
6 结束语
随着科技与美术行业的发展,人类的生活越来越智能化,青少年更应该全方面发展,基础的美术教育尤为重要。绘画教学机器人与美术教育相结合起来,积极响应国家政策——教育强国,大力发展青少年的教育水平,实现多方位发展,实现美育教育的公平化、智能化,有效地改善了当今美术老师资源短缺问题,为中国美育事业献出自己的一份力量,在这个过程当中也能够提高孩子们的绘画兴趣。
猜你喜欢
——笔架鱼肚制作技艺
长江大学学报(社会科学版)(2021年4期)2021-11-20
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
中国科技教育(2019年9期)2019-11-12
科学导报·学术(2019年44期)2019-09-10
石油地质与工程(2019年4期)2019-09-10
学苑创造·B版(2019年8期)2019-08-09
农村青少年科学探究(2019年9期)2019-03-24
赤峰学院学报·自然科学版(2014年1期)2014-03-23