管道蛇形清洁机器人控制系统设计
2021-06-16 16:42于海文王斌郭岩宝
电子技术与软件工程 2021年4期
于海文 王斌 郭岩宝
(中国石油大学(北京)机械与储运工程学院 北京市 102200)
1 引言
在管道清洁工作中,复杂的管道形状对管道内壁的污垢清洁造成了极大地困难。本文依据其复杂环境的需求,设计了以STM32单片机为核心、多个传感器和模块融合的蛇形机器人控制系统,实现了机器人远程控制以及对管道内环境信息采集和处理等功能[1]。
2 控制系统
2.1 控制系统总体结构
为了满足油污管道环境清洁机器人的控制需求,设计了管道蛇形清洁机器人,如图1 所示,控制系统上层部分是监控系统,通过Gprs 无线模块将控制指令发送给主控系统,如游动、拐弯、清洁等。主控系统检测到的视频信号和超声震荡强度波形信号分别通过2.4G的无线收发模块和Gprs 模块传输给监控系统显示。主控模块通过Gprs 模块无线遥控从动系统完成机器人的移动、清洁等功能。
2.1.1 主控系统
主控系统主要由STM32 单片机、Gprs 无线通信模块、高频超声波清洁模块以及传感器组成。主控系统通过Gprs 无线模块控制涡轮电机工作推动机器人在管道内游走,当机器人头部的摄像头检测到管道内部油污后,主控模块控制超声波发生器和振子黑片启动完成清洁工作[2]。压电传感器检测超声波清洗装置的声波强度。各模块与主控板的连接图如图2 所示。
2.1.2 从控系统
从控系统使用高速ARM 处理芯片,可同时控制多路PWM 舵机运动。从控系统通过Gprs 无线模块从接收到主控系统的信号指令后,通过PWM 信号控制蛇形机器人各个关节机构的运动。
2.2 步态控制
本文采用Serpenoid 蛇形曲线来规划蛇形机器人的步态运动轨迹。蛇形机器人采用单关节自由度设计,关节与关节之间由一个舵机控制单方向摆动和一个伺服电机控制其转动。根据机器人游走时的Serpenoid 曲线,确定其波形推进函数。
Serpenoid 曲线的曲率方程为:

式中,Kn为曲线传播过程中“S”波形的数量;α0为清洁机器人的初始弯角;L 为清洁机器人的总长;S 为蛇形机器人沿Serpenoid 曲线方向上的位移大小。
为了方便研究和计算,可将式(1)简化为:

式中,x=-α0;为Serpenoid 曲线初始曲率,由(2)可知,曲率ρ 随S 的变化而变化,当传播过程中“S”波形数量一定时,曲率主要由波形的初始弯角决定。
将曲率公式积分可得偏转角公式,即对式(2)积分,可得清洁机器人前进S 长度时头部相对于前进方向的偏转角方程。
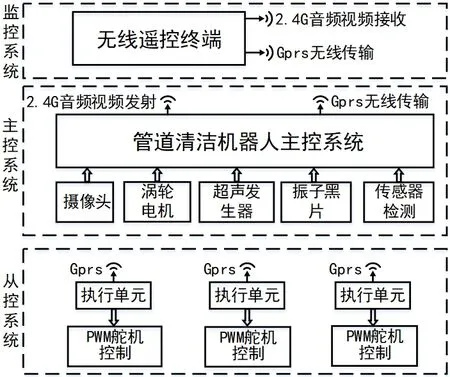
图1:机器人控制系统结构图
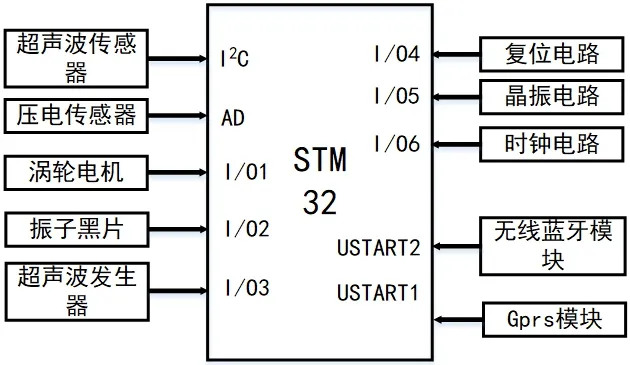
图2:各模块与主控板的连接图
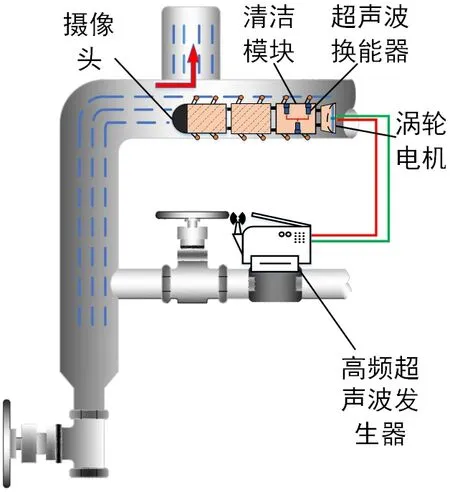
图3:机器人作业示意图
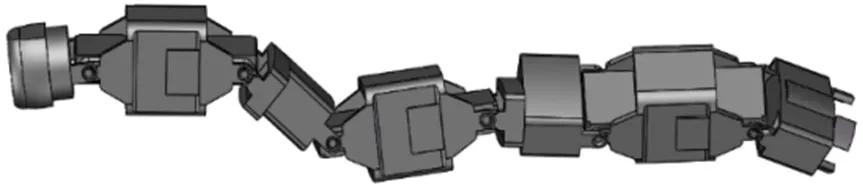
图4:管道蛇形机器人结构图
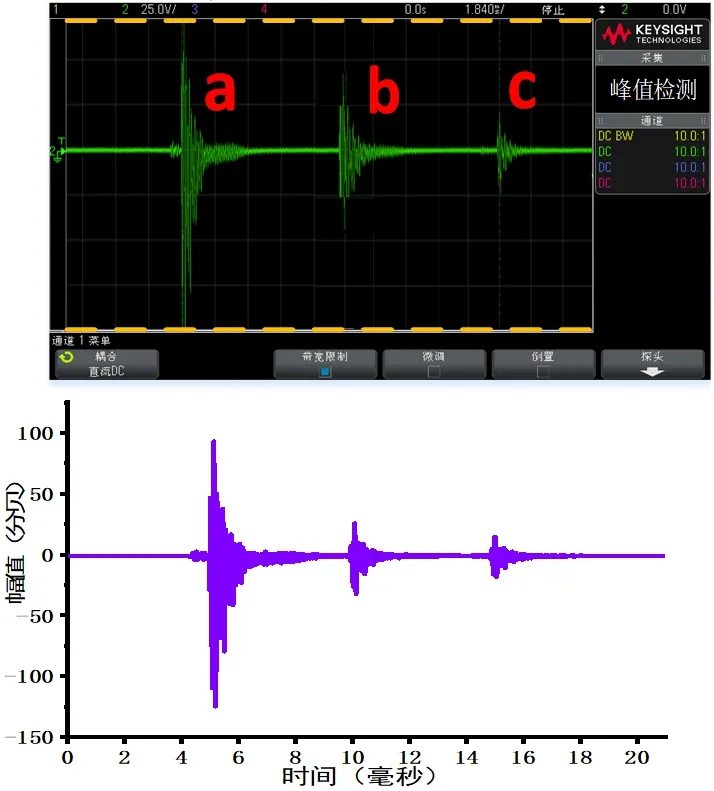
图5:超声波信号反射检测图

由(3)可知,固定参数y 和z 的值,参数x 变化,相对应的Serpenoid 曲线也随之而变,由此可得y,z 不变时,x 值越大,清洁机器人前进过程中摆动的幅值越大,并且单个“S”波形越长。
2.3 超声波清洗模块控制
超声波清洗模块利用多频超声波发生器和135KHz 高频振子黑片相结合的原理实现清洁管道作业。135KHz 超声波发生器置于管道外部,作业状态下,超声波发生器将135KHz 的交流电转换成超声频电振荡信号后,通过电缆输送给超声波换能装置,蛇形机器人游走带动超声波清洗模块完成清洗工作[3-4]。如图3 所示。
3 试验平台搭建测试
3.1 管道清洁机器人搭建
试验所需的管道蛇形清洁机器人的结构图如图4 所示,该机器人部分结构由3D 打印机打印而成,既符合质量轻的特点又节省了成本。
3.2 清洁效果检测实验
本文通过回波反射法来检测判断管道蛇形清洁机器人的清洁效果。
发射信号经过超声波换能装置的探头到机器人清洗模块的外壳,一部分能量脉冲回传至超声波换能装置的接受探头。其第三个峰值到第二个峰值,为超声波脉冲信号经过管道内部的液体以及管道内壁油污层返回的二倍时间值,其他的反射时间值因为幅值较微弱,被滤波电路处理后可忽略。电路实际测量的返回脉冲电压的峰值是第2 次峰值与第3 次峰值之间的时间差,即后面两峰值T2,根据时间T2 得到污垢的厚度。

式(4)中,Vs为污垢中的传播速度为4581m/s,为最后确定的管道内壁的污垢厚度。
3.3 清洗试验仿真结果
通过超声波反射法来检测污垢,检测探头即可发射脉冲信号,也可以接受脉冲信号。在检测系统中,管道壁的厚度是已知的,设其厚度为H1。STM32 单片机采集到二者回波信息的时间差为T。超声波回波检查电路的信号接收波形如图5 所示,其中a 为信号穿透污垢后返回的信号,b 为信号穿透管壁后返回的信号,通过计算b、c 两点波峰的时间点差值,根据公式(4)可得到污垢的厚度[5-7]。
由于管道内壁的污垢主要以铁锈为主,管道蛇形清洗机器人的外壳主要以铝制材料为主。将铁锈、铝和水声速的和取平均值,将该平均值作为实验污垢超声波传播速度参量,即VS的参考值为4581m/s,约为4581mm/μs。在计算最终污垢厚度的平均值时,首先将偏差较大的数据剔除,然后将剩余的数据取平均值操作,得到该污垢测试点最终的厚度值为:
4 结论
本文针对管道蛇形清洁机器人控制系统平台进行了设计,该平台实现了管道蛇形清洁机器人的蜿蜒、翻转和拐弯的运动步态以及无线远程控制机器人对管道内壁完成清洗和数据的采集,证明了该平台具有较好的扩展性和可行性。通过实验和仿真分析验证了无线通信的实时性和准确性,以及清洁机器人在管道环境中良好的运动稳定性和清洁能力,为工业和生活管道提供有效的清洁保证,并在太空机器管道的清洁工作上具有良好的应用前景。
猜你喜欢
疯狂英语·新读写(2023年7期)2023-08-19
军事文摘(2021年18期)2021-12-02
中国特种设备安全(2018年10期)2018-12-18
电子制作(2018年17期)2018-09-28
电站辅机(2017年3期)2018-01-31
金色年华(2017年13期)2017-04-04
军事文摘·科学少年(2016年7期)2016-09-20
现代工业经济和信息化(2016年6期)2016-05-17
电子制作(2016年21期)2016-05-17
水利科技与经济(2016年4期)2016-04-22