
车载终端经典休眠唤醒电路设计方案
2021-06-16 06:31王涛
电子技术与软件工程 2021年8期
王涛
(北汽福田汽车股份有限公司 北京市 102206)
随着互联网汽车的诞生与快速发展,车载终端在互联网汽车里担当着非常重要的角色,也是汽车电子电气架构设计中需要重点关注的部件之一。这些终端包括了远程信息系统车载终端(Telematics-Box, T-Box)、车载信息娱乐系统(In-Vehicle Infotainment, IVI)等设备。
在传统汽车电子电气架构设计中,工程设计时最关注各个ECU的耗电指标。最终ECU 完成汽车总装后,各ECU 在满足耗电指标的同时,也能够正常在预先设计的各种状态下工作,譬如:
(1)车辆在闭锁后,ECU 需要进入休眠状态进入待机低功耗工作模式;
(2)当车辆在解锁后,一级ECU 需要立即进入唤醒状态进入正常工作模式。
而车载终端设备在车辆解锁后电源进入自适应巡航控制电源(Adaptive Cruise Control, ACC)档位后,也是需要立即唤醒进入正常工作模式[1][2]。
因此车载终端的休眠唤醒电路设计方案是满足汽车电子电气架构工程设计对于ECU 电源管理思想[3]体现的关键方案。这也是本案研究的目的。
1 现状与目标
1.1 现状
汽车电子电气架构设计中的ECU 其主空芯片是微型处理器控制单元(Micro-Control Unit, MCU)。MCU 对于电源管理的实现:
(1)芯片本身的硬件逻辑控制电路对电源管理有完美的技术支撑;
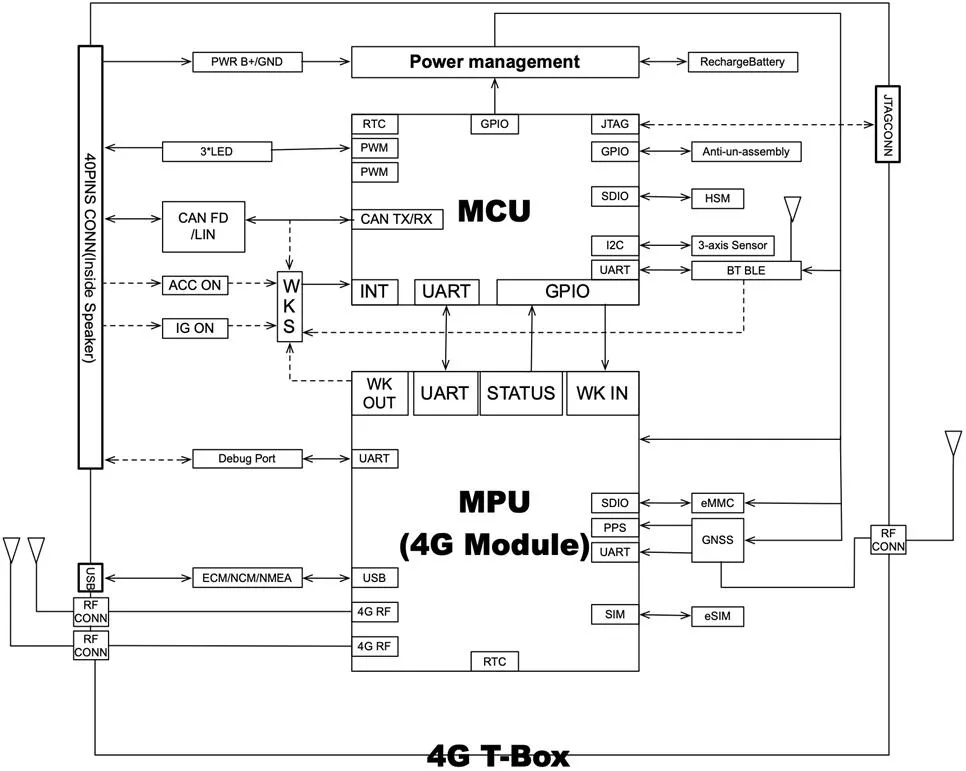
图1:MCU+MPU 硬件系统框图
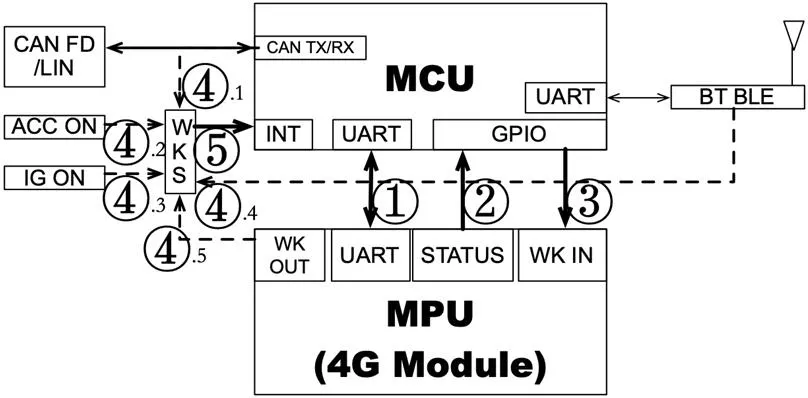
图2:休眠唤醒逻辑电路图

图3:休眠处理过程电平逻辑时序图
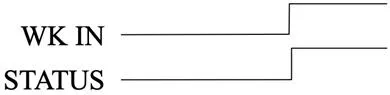
图4:唤醒处理过程电平逻辑时序图

图5:唤醒处理过程电平逻辑时序图
(2)软件系统采用汽车开发系统架构(Automotive Open System Architecture, AUTOSAR),AUTOSAR 系统[4]对于实现电源管理之休眠唤醒有完整的软件层面系统解决方案以及实时响应性:1.只要MCU 外部休眠条件成立,则基于AUTOSAR 的控制器局域网络(Controller Area Network,CAN)可以立即停止CAN 数据收发进入休眠态;2.当MCU 外部唤醒条件建立,则基于AUTOSAR 的CAN 可以马上进入唤醒态立即开始CAN 数据收发。
基于单核MCU 实现ECU 休眠唤醒,电源管理方案是已经非常成熟和可靠了。
但是对于其他车载设备(如T-Box 等),因为这些车载设备承载了更多的车联网应用功能,通常其硬件架构上都不再是基于单颗MCU,而是采用MCU+微处理器单元(Micro-Process Unit, MPU)的架构。以T-Box 为例,其硬件设计逻辑框图如图1[5]。

图6:样件反向唤醒信号截图
进入互联网汽车时代的车载设备的硬件体系架构通常都是多颗处理器单元(Central Process Unit, CPU)堆叠而成,如图1 所示的MCU+MPU 硬件体系既是ECU 发展演进的经典方案,这样的方案能极大地提升单颗MCU 性能,从而承载更多的功能。
1.2 目的
显然,MCU+MPU 硬件体系的车载设备电源管理方案远比单颗MCU 的电源管理方案复杂了很多。
车载设备的休眠与唤醒也因为多颗CPU 的出现,其工程设计与功能实现处理也将变得比较复杂。
在电源管理方面:
(1)硬件设计方案不合理;
(2)软件系统对于休眠唤醒的处理方案不适当等。
这些现象,与车载设备电流功耗密切相关,工程设计如不合理将是非常棘手的问题。
出现问题必将带来车载设备潜在的危害:
(1)车载设备漏电现象;
(2)车载设备控制失灵。
就以上陈述的现状,拟提出一种车载设备休眠唤醒电路设计方案,实际验证该电路设计方案是可行的也是经典的设计方案。
2 设计方案
2.1 设计要求
对于MCU+MPU 体系的车载设备,为了实现能满足要求的成熟可靠休眠唤醒电路,在工程设计方面应满足如下标准和原则:
(1)外部休眠唤醒条件建立后,设备应立即响应并立即切入对应状态,且休眠唤醒电路应该是高可靠性与高成熟性;
(2)MCU 与MPU 之间有高速数据总线,能够在唤醒态进行数据交换,进行高级业务交互;
2.2 具体方案
基于上述,工程设计出满足标准原则和休眠唤醒实现策略的逻辑电路图如图2。
如图2 所示,本案的休眠唤醒逻辑电路图描述了2.1 里对于车载设备电源管理所需要的休眠唤醒控制信号总线以及MCU 与MPU之间数据总线,详细说明如表1。
说明:
(1)MCU 与MPU 之间使用通用异步收发传输器(Universal Asynchronous Receiver Transmitter,UART)做为数据总线,全双工收发数据速度高可达4Mbps[6];
(2)MPU 分别引出休眠唤醒信号线接入MCU 的通用型之输入输出(General-purpose input/output, GPIO)和唤醒源锁存器(WaKe-up Source, WKS),MPU 反向休眠唤醒MCU 信号线(WaKe-up OUT, WK OUT)输出也接入WKS。
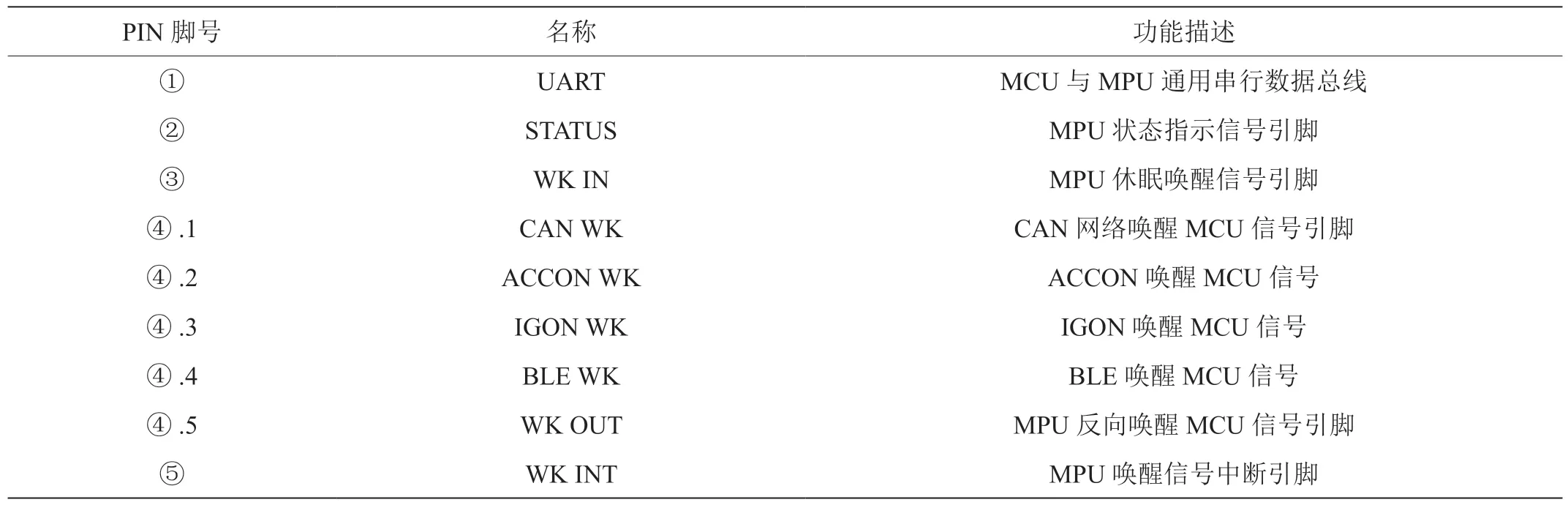
表1:休眠唤醒信号引脚说明表
(3)目前MCU 唤醒中断源(WaKe-up Interrupt, WK INT)接入唤醒源有:1.CAN;2.ACC ON;3.点火(Ignition, IG) ON;4.低功耗蓝牙(Bluetooth Low Energy, BLE);5.MPU WK OUT 这5 组唤醒源,若MCU 处于休眠,5 组唤醒源有任何1 路输出脉唤唤醒信号,则可以通过WKS 触发INT 唤醒MCU,从而拉起整个车载设备。
2.3 休眠唤醒说明
2.3.1 休眠过程处理对于休眠过程的处理,相关信号线电平逻辑时序图如图3。
如图3 所描述,当MCU 检测到车载设备外部条件满足休眠条件后,MCU 输出WK IN 低电平信号到MPU 命令其进入休眠,MPU 接收到WK IN 低电平信号立即处理进入休眠状态同时输出STATUS 低电平信号到MCU 说明MPU 已经进入休眠态,随即MCU 也进入休眠状态,至此整个车载设备进入休眠状态。
2.3.2 唤醒过程处理
对于唤醒过程的处理,相关信号线电平逻辑时序图如图4。
如图4 所描述,当MCU 被外部唤醒信号唤醒后,MCU 输出WK IN 高电平信号到MPU 命令其进入唤醒,MPU 接收到WK IN高电平信号立即处理进入唤醒状态同时输出STATUS 高电平信号到MCU 说明MPU 已经进入唤醒态,至此整个车载设备进入唤醒状态。
2.3.3 反向唤醒过程处理
对于反向唤醒过程的处理,相关信号线电平逻辑时序图如图5。
如图5 所描述,车载设备处于休眠态时,若有唤醒电话或唤醒短信通过无线网络发送到MPU 时,MPU 根据定义输出100ms 唤醒脉冲信号到WK OUT 拉起MCU。当MCU 被WK OUT 信号唤醒后,则按照2.3.2 唤醒过程处理,唤醒车载设备从而实现反向唤醒过程处理。
3 实验验证
休眠唤醒电路完成设计后,制作样件进行测试,验证反向唤醒功能。
实验条件:车载设备外部唤醒源全部置为低电平逻辑,MCU则根据2.3.1 进行休眠处理,样件顺利进入休眠状态。使用手机发送唤醒短信到车载设备的无线4G 模块,进行反向唤醒处理。使用示波器监控MPU 的STATUS 和WK OUT 信号,截图如图6。
从图6 可以看到,到手机发送的唤醒短信到达车载设备的4G模块后:
(1)示波器监在CH1 控MPU WK OUT 信号线有输出100ms唤醒脉冲信号到MCU;
(2)随即示波器监在CH2 监控到MPU STATUS 信号线有输出逻辑高电平信号。
以上示波器实际监控信号输出符合2.3.3设计的电平逻辑时序,此时车载设备实现了反向唤醒处理过程。实验验证休眠中的车载设备的确被唤醒短信唤醒了。
4 结语
本案研究的车载设备休眠唤醒电路设计方案,最终落地在T-Box、IVI 以及V2X[7]等多种车载设备产品上,并成功在车辆进行总装,市场反馈设备运行可靠没有馈电发生。
实践证明,本案研究方案可以做为汽车电子电气车载设备经典休眠唤醒电路设计,在未来新的产品研发设计中,可以继承和进一步革新与迭代。
猜你喜欢
汽车电器(2021年12期)2021-12-30
乐山师范学院学报(2021年12期)2021-02-25
电子制作(2019年16期)2019-09-27
电子制作(2019年23期)2019-02-23
电测与仪表(2016年22期)2016-04-12
电源技术(2016年2期)2016-02-27
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年2期)2015-04-09
电测与仪表(2014年7期)2014-04-04
电子设计工程(2014年19期)2014-02-27
