矿山掘进机械设备的电气自动化改造研究
2021-06-14 08:30吴涛
世界有色金属 2021年6期
吴 涛
(甘肃畜牧工程职业技术学院,甘肃 武威 733006)
矿山掘进机械设备是矿山的关键设备,其工作环境往往十分恶劣,给矿山施工增加了难度,严重制约了施工进度,随着现代化生产技术的进步,掘进机械设备的自动化设计逐渐成为研究热点,自动化的操作模式也在逐渐取代原有的操作模式。因此,提出矿山掘进机械设备的电气自动化改造研究,优化掘进设备的电气自动化性能,使其协调性满足实际应用需求,解决上述中存在的问题。
1 矿山掘进机械设备的电气自动化改造原理及特征分析
1.1 电气自动化改造原理
矿山掘进设备的电气自动化改造融合了多个领域的相关知识,所以其发展往往会受到外界多种因素的影响。诸如:在针对电气自动化技术进行研发工作的时候,运用电子计算机技术以及专业控制技术的效果,都与电气自动化技术的成效存在密切的关联。其次,电气自动化的运用并非是简单的程序,其涉及到了诸多的复杂工序,并且具有较高的危险性,所以在将其与矿山掘进机械设备加以综合运用的时候,需要对其适用性加以全面的分析研究,保证将其作用能够充分的施展出来[1]。其次,要想保证技术的作用能够被彻底的发挥出来,利用有效的方法对电气自动化改造的实用性加以检验,利用电子设备进行模拟。自动化技术在电气工程控制技术之中作用是十分巨大的,并且也是整个领域中的关键部分,在实施专门的研究工作的时候,要全面的对相关信息加以收集,结合各方面情况,制定正确的研究目标。
1.2 电气自动化改造特征
就以往陈旧的电气自动化技术实际情况来说,其中最为突出的问题就是控制系统的性能较差不能满足矿山掘进工作的实际需要。在实践使用陈旧的电气自动化技术的时候,整个操作过程十分的复杂,并且操作的准确性较差。电气自动化控制所针对的对象并非是固定的,所以也会对电气自动化控制的效果造成不良影响[2]。与控制设备的使用效果存在关联的因素较多,控制的模式不需要综合控制对象来进行调整,所以诸多负面因素是可以实现避免的,并且能够对于电气自动化控制准确度的提升起到良好的影响。这也充分的说明了,电气工程运行因为自动化技术的运用,充分的表现出了便利性,从而实现地电气系统运行切实控制的目的,这样才能为自动化控制器运行效率的不断提升创造良好的基础。
2 矿山掘进机械设备的电气自动化改造设计
2.1 掘进机械设备可编程控制器设计
根据掘进机械设备电气自动化功能需求,以及掘进机械设备所处的复杂的工作环境,设计的可编程控制器必须具有较强的抗干扰能力和较强的稳定性。因此,在可编程控制器设计中,选用西门子S7-319PLC作为核心模块,配合数字量模拟量扩展模块和其它模块,实现机械设备的自动化。
S7-319为掘进机械设备的实际应用提供了一个多点接口和DP接口,多点接口有助于实时更新控制程序,DP接口可实现自动化工作中各个模块之间的无障碍通信。由于S7-319没有集成的装载存储器,在使用中必须插入微存储卡,用以备份用户程序和自动化数据。
掘进机械设备的自动化实现需要液压模块和控制模块的话合作,两者之间的协调合作需要大量输入输出端口,S7-319的应用已经为其提供了众多种类的扩展模块。根据功能不同,将控制模块设计为主从模式,主机PLC负责与其它模块进行通信,通过模拟量输入模块和数字量输入模块读取用户指令和控制参数。根据掘进机械设备自动化需求,统计需要的模拟量输入接口数目、数字量输出接口数目和数字量输入接口数目。
从机PLC负责控制液压模块,通过上诉中的输出模块,控制掘进机械设备的各个变化,同样在设计时需要根据实际需求,统计模拟量输入接口数目、数字量输出接口数目和数字量输入接口数目。
在确定所有模块后,选用合适功率的电源模块支持各个模块的供电,以此保证掘进机械设备的正常运行。S7-319作为核心模块,在选择之前,计算核心模块所需的功率,以及其它相关扩展模块的功率,预留一定比例的余量。在考虑上述各种因素的情况下,选用PS307电源扩展模块,输入220V交流电,为掘进机械设备的各个模块提供24V/5A的稳定输出,保证机械设备稳定工作。在安装中,将其安装在核心模块的左侧[3]。
2.2 制动模块的优化
制动模块的优化,主要结合前人的研究经验和成果,建立制动模块的数学模型,基于该模型对制动模块内的传递函数进行优化。制动模块的原理图如图1所示。
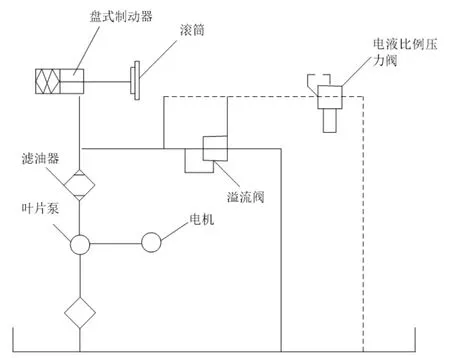
图1 制动模块的原理图
矿山掘进机械设备是一个复杂的机电设备,其制动模块是通过改变送向电液比例阀的电流大小,来实现对制动模块的压力输出,进而控制制动力矩,实现对掘进机械设备运行状态的控制。
3 矿山掘进机械设备的电气自动化改造实验研究
3.1 实验准备
矿山掘进机械设备的电气自动化改造实验研究,需要对掘进机械设备进行多项目测试,为了保证机械设备的正常运行,在实验室内进行模拟测试,实验测试完成后,联合掘进设备的配电系统和液压系统,模拟矿山环境,对掘进机械设备的各项功能进行测试及研究。
根据掘进机械设备的功能需求和硬件配置,在实验室内搭建模拟实验系统,完成相关程序设计和硬件配置。在正式实验前,测试程序中的工作流程和功能切换逻辑,若存在异常问题,在测试过程中修正逻辑错误和功能问题。考虑到机械设备的电气自动化与控制性能息息相关,为了保证实验结果的公平公正,实验中设置统一的控制参数,如表1所示。
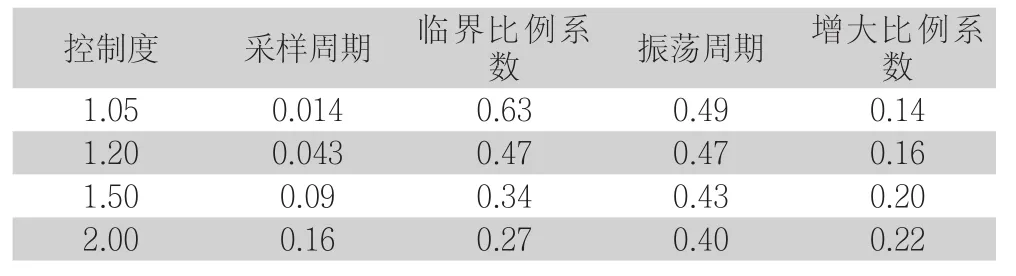
表1 控制参数设置
引入常规的电气自动化改造方法,设计协调性对比实验,依据实验结果分析各个电气自动化改造方法的实际应用性能。
3.2 实验结果分析与结论
基于上述内容,整理各个电气自动化改造方法下的实验结果,具体内容如表2所示。
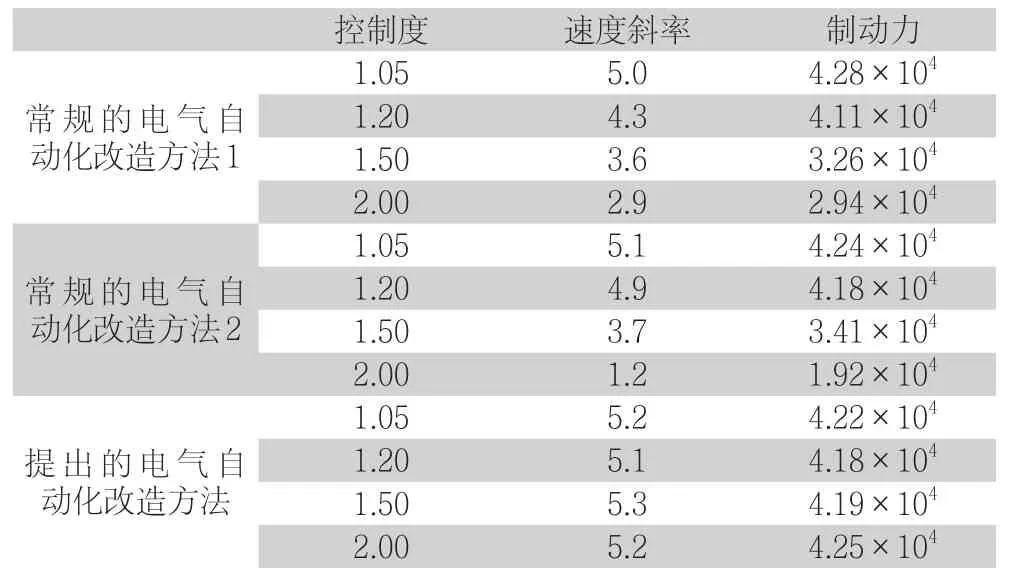
表2 不同方法的协调性实验结果
通过表1中数据分布情况可知,常规的电气自动化改造方法1在控制度逐渐增加的情况下,其速度斜率逐渐下降,对应的制动力也有所减少,说明其控制效果比较差,自身协调性不理想;常规的电气自动化改造方法2存在相同的问题。与前两组实验数据相比,提出的电气自动化改造方法速度斜率变化稳定,其相对应的制动力变化也同现稳定,该方法的协调性效果能够达到理想状态,消除了倒转现象,完全可以取代手动操作。
4 结束语
本文以矿山掘进机械设备为研究目标,在大量文献资料的支持下,提出了矿山掘进机械设备的电气自动化改造研究。并在方法设计完成后,通过大量对比实验,验证了提出的电气自动化改造方法的可靠性,解决了常规方法中存在的缺陷,为矿山掘进机械设备的自动化提供更多的可能。
猜你喜欢
河北地质(2021年2期)2021-08-21
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
建材发展导向(2021年7期)2021-07-16
教育·校长参考(2021年5期)2021-07-08
科技创新导报(2021年31期)2021-05-10
汽车维修与保养(2021年12期)2021-03-08
矿产勘查(2020年7期)2020-12-25
家长(2020年28期)2020-01-02
汽车维修与保养(2019年4期)2019-09-11