狭缝均质器型成像光谱仪光学设计
2021-06-13 17:31:06刘紫莹朱嘉诚唐绍凡李欢张明杰
航天返回与遥感 2021年2期
刘紫莹 朱嘉诚 唐绍凡 李欢 张明杰
(1 北京空间机电研究所,北京 100094)
(2 苏州大学光电科学与工程学院,苏州 215006)
0 引言
对地观测卫星受地面反照率变化和大气层变化的影响,导致地面观测场景不均匀。在沿轨方向的观测场景不均匀将造成星载成像光谱仪中的物理狭缝被非均匀照明,对于大气探测等领域光谱维过采样的成像光谱仪,将导致光谱响应函数失真[1]。目前,可采用软件校正或硬件抑制解决光谱仪狭缝照明不均匀导致的光谱失真现象。美国宇航局发射Aura卫星中的OMI载荷、欧空局研制Sentinel-4卫星中的UVN载荷等,均采用软件算法对光谱失真进行校正补偿,通过时间过采样的数据来承载狭缝照明不均匀的信息,进行算法校正[2-4]。但是软件算法只能校正可见光波段下的光谱失真问题,无法应用于短波红外谱段。因此,欧空局在Sentinel-5卫星搭载的UVNS光谱仪系统上,采用添加反射式狭缝均质器的硬件抑制方法,减少观测场景在沿轨方向的不均匀性导致的光谱响应函数扭曲,从而降低大气成份计算误差。此外,德国在提出的CarbonSat卫星计划中,也通过添加反射式狭缝均质器设计,实现匀光探测[5-8]。
目前,中国关于观测场景不均匀导致光谱失真的研究尚处于起步阶段,作为硬件抑制的方法——狭缝均质器型成像光谱仪光学设计,具有研究的必要性。本文首先分析明暗分布不均匀的观测场景对星载成像光谱仪的影响,然后介绍狭缝均质器的构成和工作原理,最后给出系统的优化设计和结果,并进行了像质评价、仿真验证和分析说明。
1 狭缝均质器
1.1 场景不均匀性分析
场景不均匀性是由云、气溶胶层、地面高度等造成的大气层变化和地面反照率变化引起的。因此,星载成像光谱仪观测的场景在沿轨方向,即子午方向明暗分布不均匀。图1为沿轨方向参数化的一维“非均匀场景”。
图1 中为沿卫星飞行方向,将成像光谱仪观测到的不均匀场景进行一维参数化,“#1”为观测场景的明暗分布由全暗场景变为全明场景,“#2”为由全明场景变为全暗场景。
带有空间相关性信息的权重W(x)在全明和全暗两种反照率值之间进行线性插值,其中插值权重W(x)仅采用两个值,即0或1。当测量的光谱坐标为λ时,观测场景的反照率L(λ,x)为

图1 一维“非均匀场景”Fig.1 One dimensional “inhomogeneous scene”

式中x指卫星沿轨运动方向;L1()λ表示测量光谱坐标为λ时,全暗场景的反照率值;L2()λ表示测量光谱坐标为λ时,全明场景的反照率值。
成像光谱仪传播参数化的反照率L(λ,x):将沿轨方向不均匀的观测场景权重W(x)与望远系统的点扩散函数PSaF(x,y)进行模糊处理得到W~(x),再经过狭缝边缘的切割和光谱仪点扩散函数的模糊处理,最终获得成像光谱仪的辐照度I(λ,x)为

式中y指卫星交轨运动方向;S(x)为狭缝函数;PSbF(x,y)为光谱仪的点扩散函数;*表示卷积。
将模糊处理的权重W~(x)替换为在狭缝宽度上的平均值,得到均匀场景下的辐照度V,进而评估因场景不均匀性带来的辐射误差。

图2 为对不同波段处均匀场景下的辐照度V进行归一化后,获得的在不均匀场景下,成像光谱仪的归一化辐射误差值。由图2可知,波长在760~770nm之间,成像光谱仪的归一化辐射误差波动较为明显。由于明暗分布不均匀的观测场景将造成在成像光谱仪入射狭缝处成非均匀照明的像,最终导致产生辐射误差。通过在传统成像光谱仪的入射狭缝后面添加一个具有匀光功能的柱透镜式狭缝均质器,将入射狭缝处照明非均匀的图像进行匀化,实现辐射误差的抑制。
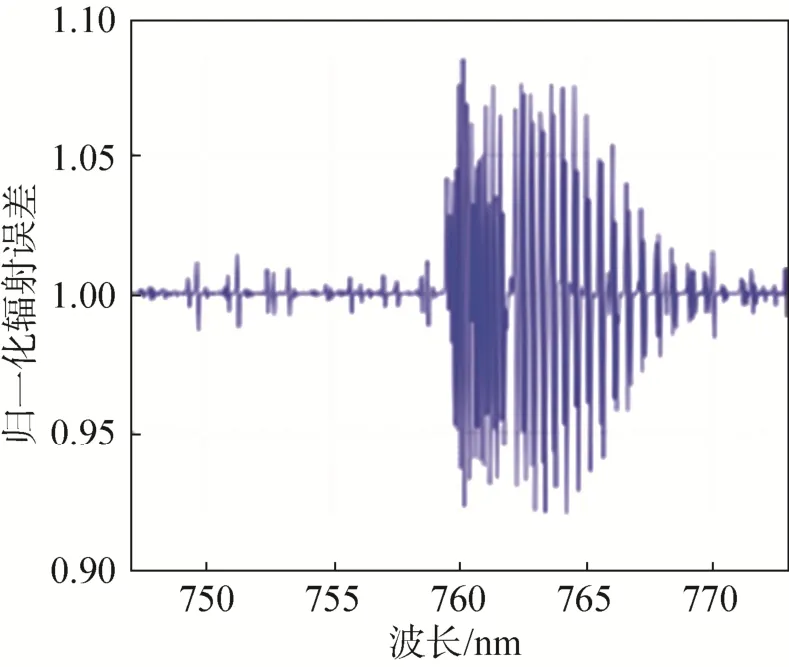
图2 归一化辐射误差Fig.2 Relative radiation error
1.2 狭缝均质器构成和原理
柱透镜式狭缝均质器是由物理狭缝、柱状透镜、虚拟狭缝三部分组成[9],结构如图3所示。
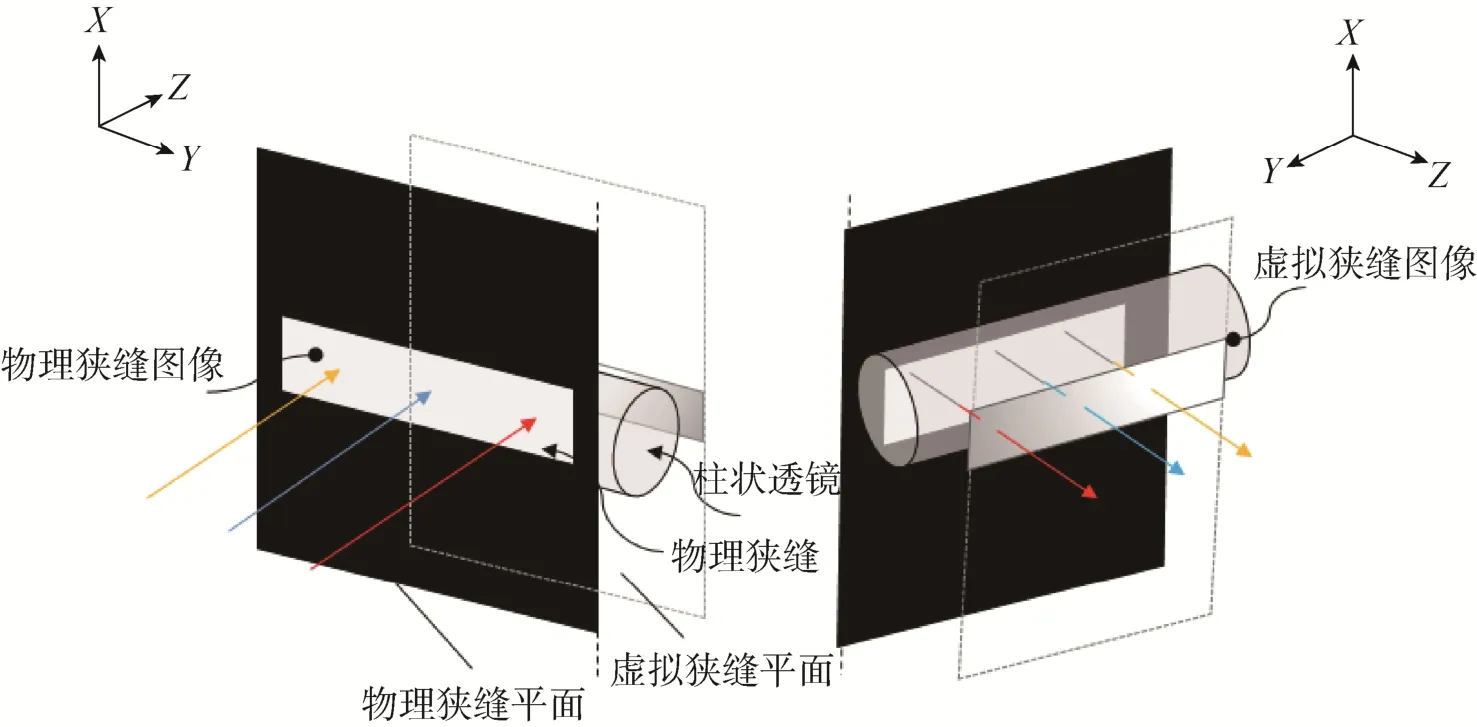
图3 柱状透镜式狭缝均质器结构透视图Fig.3 Structure diagram of the lens-based slit homogenizer
图3 中坐标x指卫星沿轨运动方向即子午方向即物理狭缝宽度方向,坐标y指卫星交轨运动方向即弧矢方向即物理狭缝长度方向,在物理狭缝后放置与狭缝平行的柱状透镜,f1为柱状透镜的前焦距,透过狭缝的光线经柱透状镜后形成虚拟狭缝,虚拟狭缝像投影在柱状透镜后焦距f2处。即狭缝均质器的前焦平面与物理狭缝平面重合,狭缝均化器的后焦平面与虚拟狭缝面重合。
其工作原理是将望远物镜的像与狭缝均质器的瞳进行交换,即望远物镜上不同视场且能量分布不均匀的光束通过狭缝均质器中的柱状透镜进行折射,形成平行光,即各视场光束的能量分布均匀。不同视场的光束在光谱仪入口处相互重合,最终形成光线均匀分布的光瞳图像,实现光谱仪入口处图像照明均匀,如图4所示。
图4 中三个不同颜色的线代表三个不同的视场,在望远物镜(物理狭缝)处分布三个不同视场的光束,即物理狭缝处形成光照不均匀的物理狭缝图像,通过柱状透镜的作用,将三个不同视场的光束均变成平行光,并在其光瞳处三个视场的光束相重合,即物理狭缝图像的光线进行重新分布,得到光照均匀的虚拟狭缝图像。
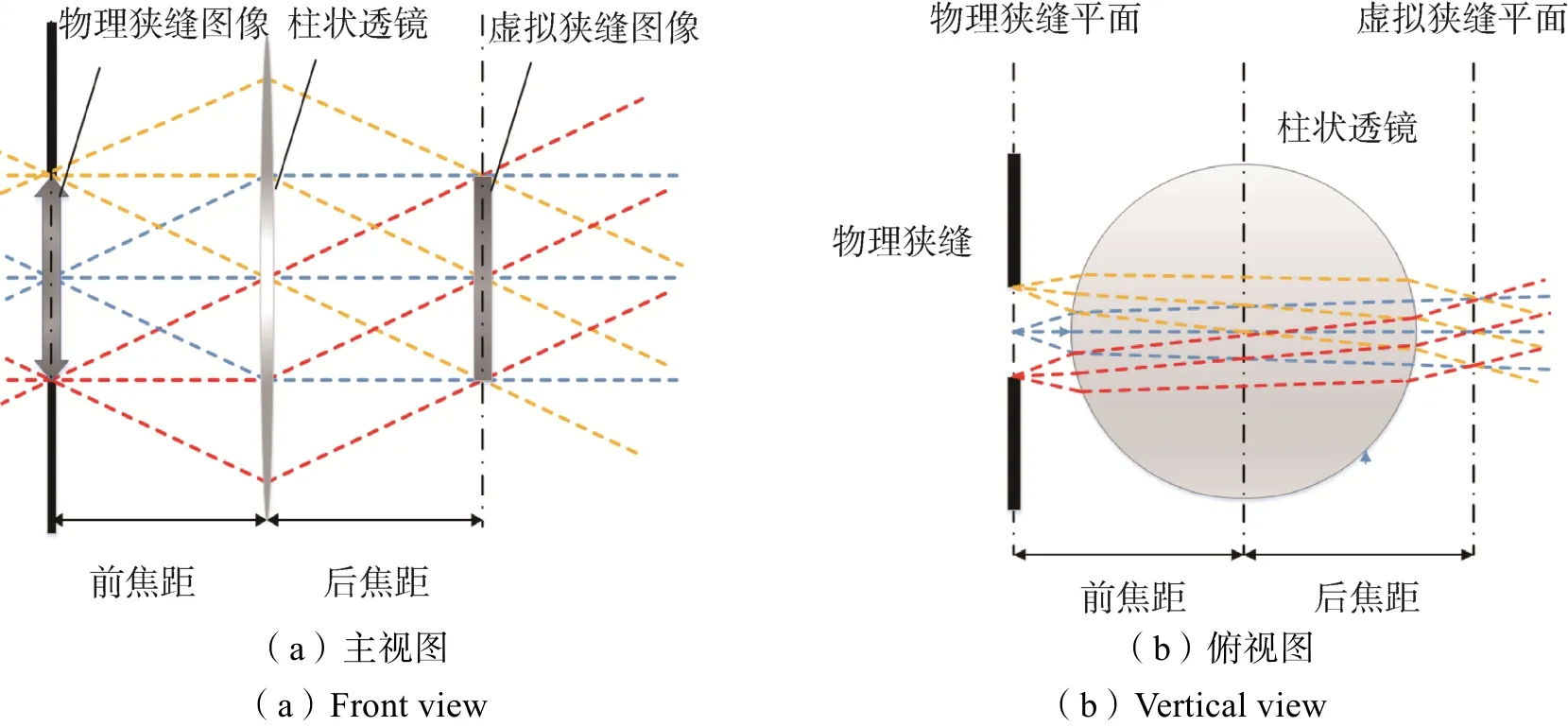
图4 狭缝均质器工作原理Fig.4 Working principle of slit homogenizer
采用柱状透镜作为匀光元件具有如下优点:
1)该透镜仅在狭缝宽度方向有曲率,沿狭缝方向没有曲率。满足光线仅在狭缝宽度方向发生弯曲,不改变沿狭缝方向光线,以保留交轨方向完整图像信息;
2)柱状透镜的横截面为圆形,旋转自由度小,安装无需控制;
3)柱状透镜相对坚固,虚拟狭缝平面可以靠近物理狭缝平面,减小狭缝均质器设备的体积。
2 系统设计方案
2.1 光学相关指标要求
由于光谱响应函数失真现象仅存在于大气探测等领域光谱维过采样的宽狭缝成像光谱仪中,因此本系统狭缝的宽度为100μm, 并选用像元尺寸为25μm×25μm的CCD面阵探测器,光谱维4倍过采样,满足狭缝像在宽度方向上被完整接收,空间维不进行合并,通过4倍过采样实现采集保真的光谱信息[10]。
目前,国际上针对可见光波段范围内的光谱失真问题,均采用后期软件校正的方法解决,但是,软件校正不能用于吸收带太强、由多种化学物质产生的短波红外谱段。因此,本系统的工作波段范围为1.0~2.5μm,通过该仪器的研究设计,实现硬件抑制的方法解决在短波红外谱段出现的光谱失真现象。仪器与光学系统相关的指标要求见表1。

表1 光学相关指标Tab.1 Specifications related with optical system
2.2 设计方案
狭缝均质器用于匀化物理狭缝宽度方向的光线,不改变弧矢方向光线的传播路径,在匀化沿轨方向不均匀性的同时,保留交轨方向的空间信息。为此,需要设计特定像散的前置望远系统,实现观测对象的子午像点成像到狭缝均质器的前表面,弧矢像点成像到狭缝均质器的后表面,即均质器不作用于弧矢像点。在满足系统指标要求的初始望远系统后面添加具有像散特性的光学元件——柱面透镜[11-12],可以通过改变柱面透镜的曲率半径,灵活地设置望远系统像散大小,易于后期操作和装配。分光系统采用凸面光栅Offner型分光装架,具有固有像差小、像质良好等优点[13-14],该光学系统设计方案的结构简图如图5所示。

图5 整体方案结构简图Fig.5 Sketch of optical system
狭缝均质器型成像光谱仪包括像散型望远系统、狭缝均质器和分光系统。 像散型望远系统将观测对象的子午像点成像到狭缝均质器前表面,弧矢像点成像到分光系统焦平面,狭缝均质器对子午像点进行匀光处理,在分光系统焦平面上形成虚拟狭缝图像,经后组Offner分光装架进行分光接收,最终可在探测器焦平面上得到光谱图像。
3 系统优化设计与结果
3.1 像散型前置望远系统
根据光学指标要求,选择具有无遮拦、宽视场、大孔径、小尺寸的离轴三反式系统作为初始望远结构[15-17]。然后在离轴三反系统的三镜后面添加一个柱面透镜,将其子午方向的曲率半径和中心厚度设置为变量进行人机交互式优化,得到像散型前置望远系统子午和弧矢方向成像品质最优的位置,设为望远系统的子午像面、弧矢像面,两个像面之间的距离即为前置望远系统所提供的像散值。优化后得到像散型望远系统设计结果如图6所示,结构参数见表2。

图6 像散型望远系统设计结果Fig.6 Design result of astigmatic telescope

表2 优化后像散型望远系统结构参数Tab.2 Optimized parameters of astigmatic telescope system configuration
望远系统的像散值为0.596mm,子午方向焦距f3=187mm,弧矢方向焦距f4=200mm,F数为3.86,视场角为6°×0.028°,所成物理狭缝像的宽度为97.6μm,长度为21.1mm,满足设计指标要求。
图7 (a)、(b)分别是系统子午像面中子午像点和弧矢像面中弧矢像点的调制传递函数曲线(MTF),在奈奎斯特频率(20线对/mm)处,系统子午像点和弧矢像点的 MTF 值分别大于 0.79和0.81,光学系统具有接近衍射极限的成像品质。
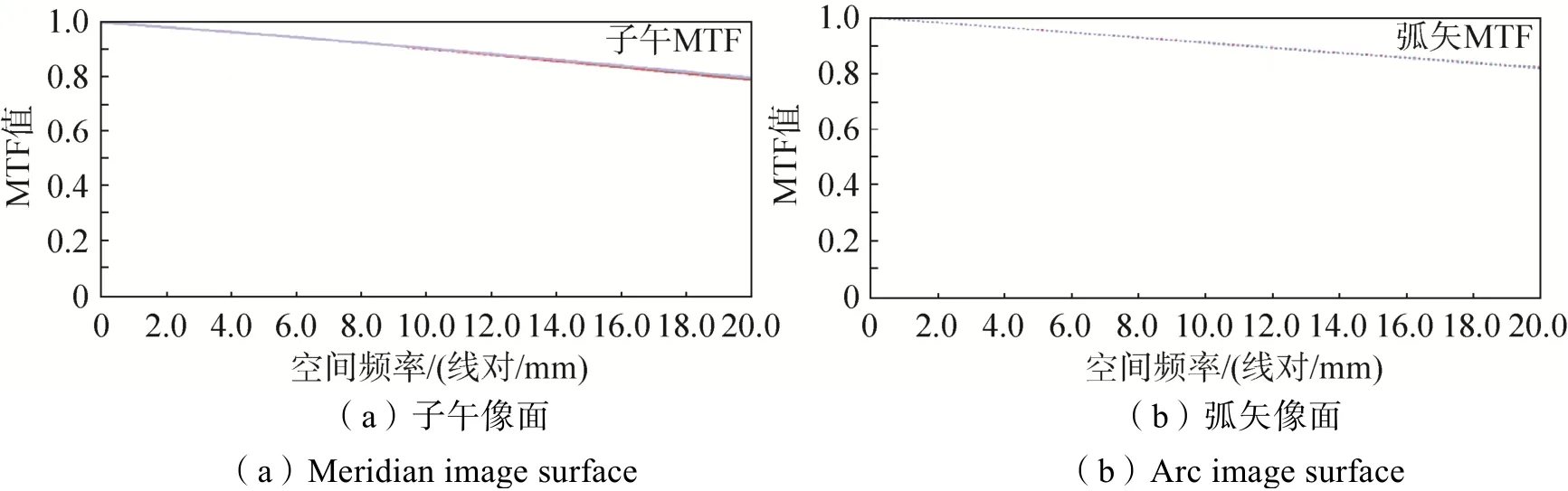
图7 像散型前置望远系统MTF曲线Fig.7 MTF curve of astigmatic telescop
3.2 狭缝均质器
柱透镜式狭缝均质器结构参数的选取需满足以下光学成像要求:
1)通过柱状透镜的匀光作用,使成像在物理狭缝处同视场的发散光线变成平行光,然后在虚拟狭缝处实现不同视场光线的汇聚。
2)在子午方向,由不同视场光线汇聚成的虚拟狭缝像与匀光作用前的物理狭缝像大小相同。
3)在弧矢方向,光线的传播不受狭缝均质器匀光作用的影响,以保留交轨方向的空间信息,要求弧矢像点的成像品质优良。
根据其光学成像要求,借助Zemax软件,在满足前置望远系统所提供的像散值的前提下,确定理想柱状透镜子午方向的光焦度值xφ,再通过焦距公式和普通柱状透镜的焦距和曲率半径关系公式,计算得出柱状透镜子午方向曲率半径、弧矢方向曲率半径、前焦距f1和后焦距f2的初始结构参数,将其输入软件中,通过改变柱状透镜子午方向曲率半径、中心厚度、前焦距f1和后焦距f2的值,综合考虑设备中柱状透镜的结构尺寸和加工难易程度以及光线的分布情况等因素,反复调整,获得满足成像品质要求的最优解。依上述描述可确定狭缝均质器初始结构参数,如表3所示。

表3 柱状透镜式狭缝均质器结构参数Tab.3 Structure parameters of lens-based slit homogenizer 单位:μm
通过调制传递函数MTF曲线评价柱透镜式狭缝均质器的成像品质,如图8(a)、(b)所示。

图8 狭缝均质器MTF曲线Fig.8 MTF curve of slit homogenizer

图9 入射光源在沿狭缝宽度方向的非均匀照明Fig.9 Non-uniform illumination of the incident light source along the width of the slit
用物理狭缝面的子午像点MTF曲线评价均质器子午方向的像质,虚拟狭缝面的弧矢像点MTF曲线评价均质器弧矢方向的像质。整个视场和波段的子午像点和弧矢像点MTF分别达到0.79和0.68以上,柱透镜式狭缝均质器成像品质良好。
利用LightTools建立仿真模型进行5×108条光线追迹,通过对狭缝均质器型成像光谱仪中虚拟狭缝出瞳面的出光特性与传统成像光谱仪中物理狭缝面的出光特性进行分析对比,评价柱透镜式狭缝均质器的匀光性能。
成像光谱仪中物理狭缝被非均匀照明的原因是卫星观测场景在沿狭缝宽度方向上的不均匀造成的。因此,通过仿真入射光源在沿狭缝宽度方向的非均匀性,实现星载成像光谱仪观测场景不均匀性的模拟,如图9所示。
图9 是将一束均匀分布的平行光在沿狭缝宽度方向上进行遮挡,使入射光线在子午方向明暗分布不均匀。将仿真后的光线分别入射到传统成像光谱仪和狭缝均质器型成像光谱仪中,获得如图10(a)传统成像光谱仪物理狭缝面的辐照度分布和图10(b)狭缝均质器型成像光谱仪虚拟狭缝面的辐照度分布。

图10 观测非均匀目标的辐照度Fig.10 Irradiance of non-uniform target
图10 左边是整个狭缝范围内的照度图,右边是狭缝宽度方向的照度分布曲线。将在狭缝宽度方向上两种光谱仪的照度分布值代入不均匀度公式

式中σ为不均匀度;Imax,Imin分别为最大辐照度和最小辐照度值,通过计算得出传统成像光谱仪中物理狭缝面不均匀度为100%,柱透镜式狭缝均质器的虚拟狭缝面不均匀度为14.29%,与传统成像光谱仪中物理狭缝面的均匀度相比较,狭缝均质器具有显著匀光功能。
3.3 Offner分光装架
分光装架的设计指标如表4所示,狭缝长度和数值孔径均与前置系统相匹配,可对由狭缝均质器所生成的虚拟狭缝进行光谱分光。
由于系统的探测光谱范围为1~2.5μm,光谱采样间隔为10nm,探测器像元尺寸为100 μm,可计算得到系统谱面宽度为15mm。为了确保光栅的曲率半径值在合适的范围内,令其槽密度取50线对/mm作为初始值,在一级衍射条件下,根据系统的同心对称性和光栅方程可分别计算求得Offner的初始结构光栅、反射镜1和反射镜2的曲率半径值。将计算得到的初始结构参数输入优化软件,控制其成像品质以及遮拦等性能[18-20],经过优化得到最终设计结果如图11所示,结构参数如表5。图12 展示了在中心波段处的MTF曲线,优化得到的Offner分光装架具有接近衍射极限的成像品质。

表4 分光系统参数Tab.4 Parameters of dispersive light system
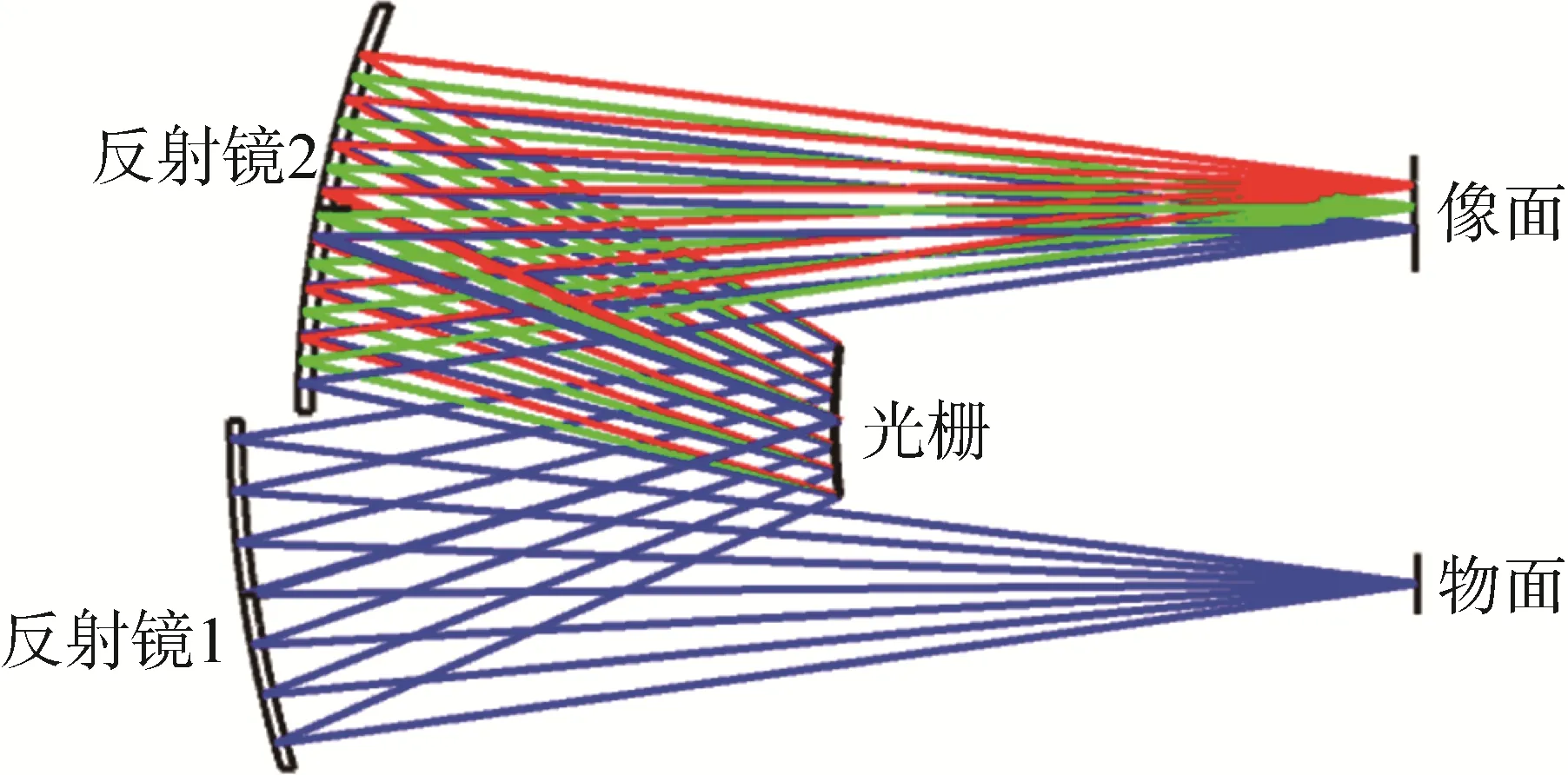
图11 Offner分光装架设计结果Fig.11 Design result of offner spectrometer

表5 结构参数Tab. 5 Optimized parameters

图12 Offner分光装架MTF曲线Fig.12 MTF curve of offner spectroscopic configuration
3.4 全光学系统设计结果
将像散型前置望远系统、柱透镜式狭缝均质器和Offner型分光装架拼接,即得到狭缝均质器型成像光谱仪全光学系统,全系统光路如图13所示,系统总长为609mm,结构紧凑。
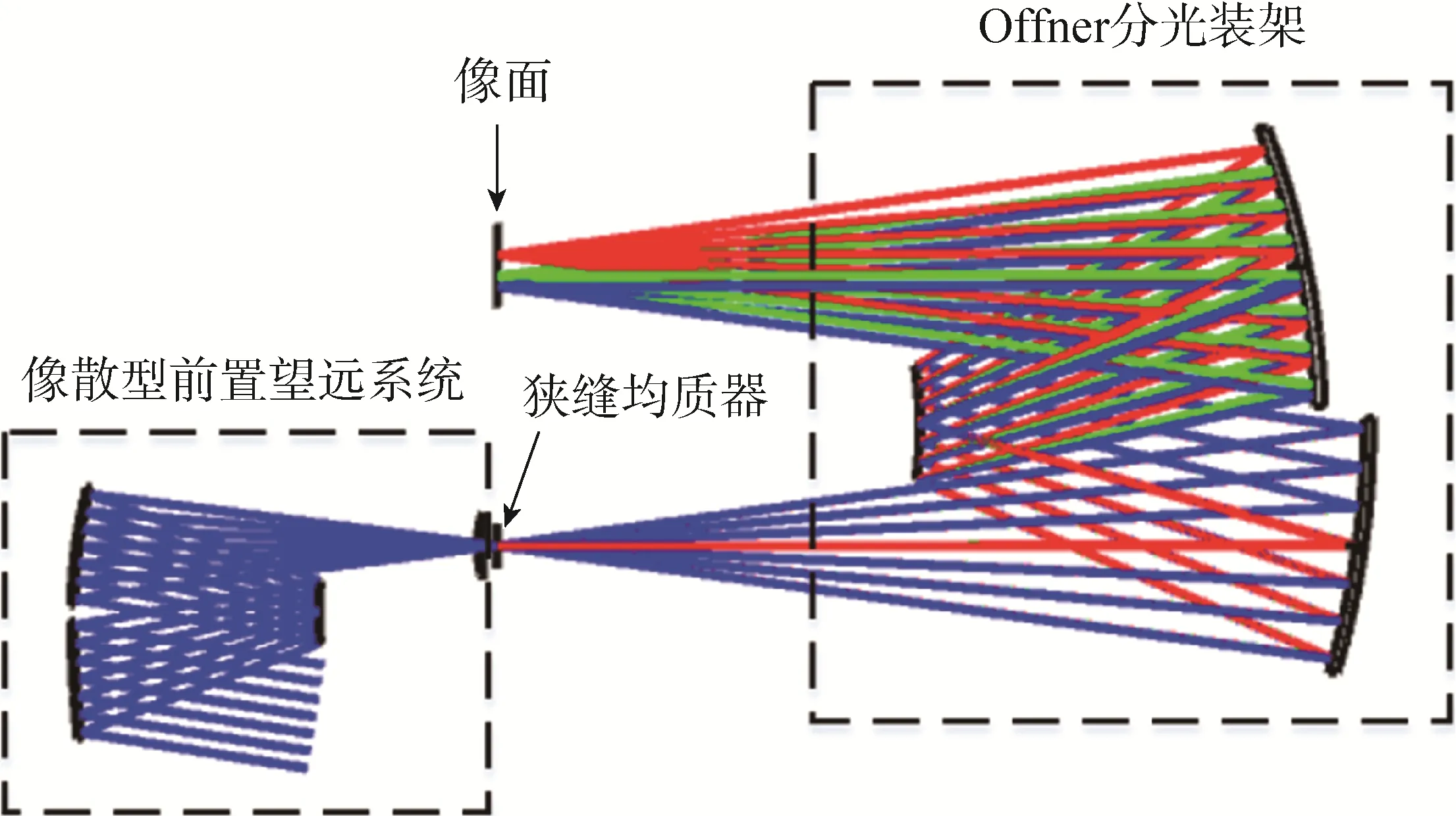
图13 全光学系统Fig.13 The whole optical system
利用MTF曲线评价狭缝均质器型成像光谱仪弧矢方向成像品质,系统在中心波长处的MTF曲线如图14所示,在奈奎斯特频率处,系统在弧矢方向的MTF值均优于0.74,系统在弧矢方向成像品质优良。
利用光谱响应函数SRF (Spectral Response Function),直观表现狭缝均质器型成像光谱仪可以有效抑制子午方向的光谱失真,表达式为


图14 系统弧矢方向调制传递函数曲线Fig.14 MTF curve of optical system in sagittal direction
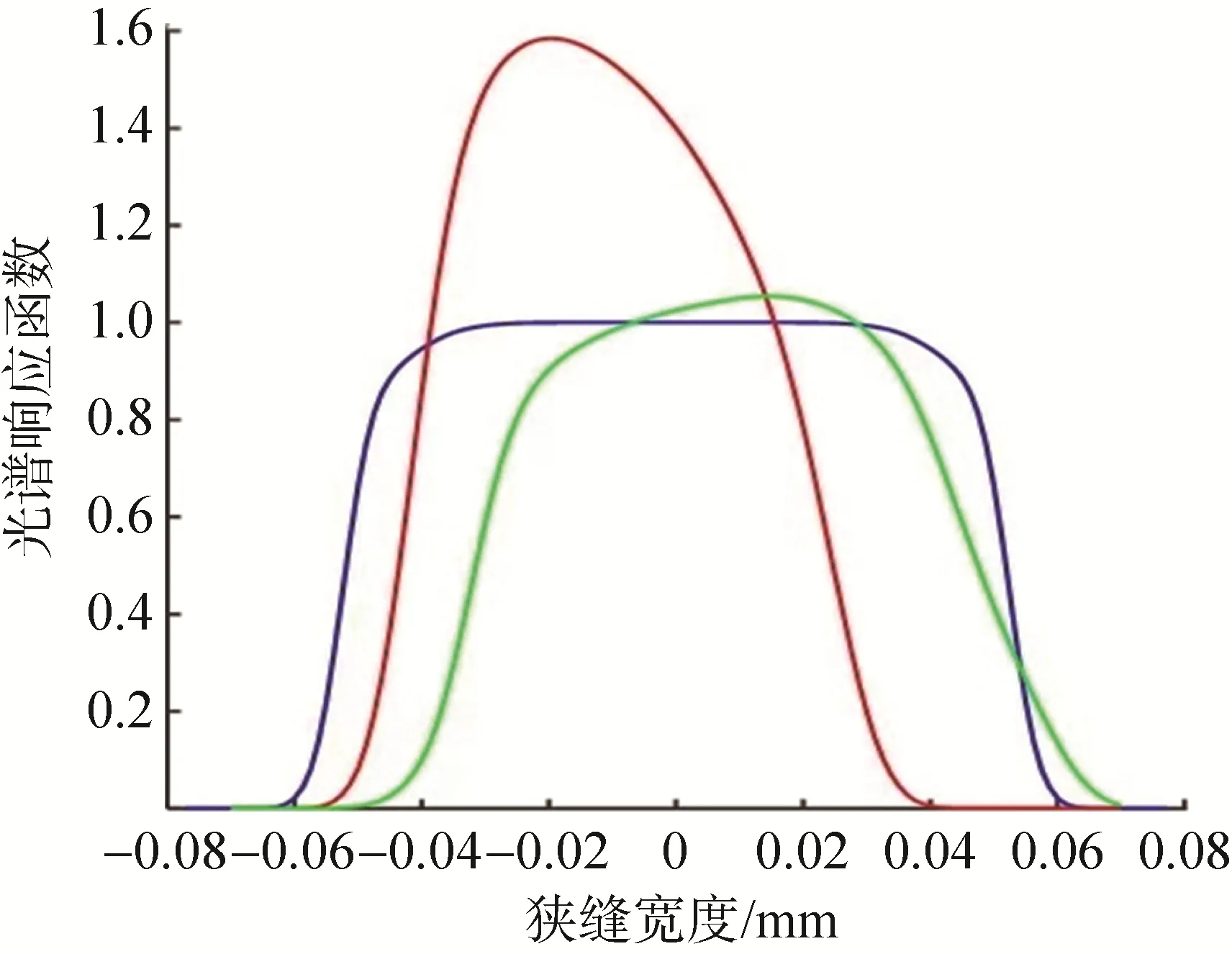
图15 光谱响应函数曲线Fig. 15 SRF curve
将仿真观测场景不均匀得到的传统成像光谱仪和狭缝均质器型成像光谱仪的辐照度分布值分别代入入射狭缝函数中,以表征真实的狭缝照明轮廓。本文计算了在中心波段为1.75μm处,三种不同情况下的光谱响应函数曲线图如图15所示。
图15 中,蓝色线代表理想情况下,成像光谱仪的光谱响应函数,绿色线、红色线分别代表观测场景不均匀情况下,狭缝均质器型成像光谱仪和传统成像光谱仪的光谱响应函数,将各曲线数据带入式(7)中,对传统成像光谱仪和狭缝均质器型成像光谱仪的光谱响应函数失真值ΔSRF进行量化

4 结束语
本文设计了一种工作于短波红外波段的狭缝均质器型成像光谱仪光学系统,包括像散型前置望远系统、狭缝均质器和Offner分光系统。前置望远系统通过添加柱状透镜实现特定的像散功能;后置分光系统采用Offner结构,实现了像差小、像质良好。利用柱透镜式狭缝均质器的匀光功能,抑制卫星在沿轨方向观测场景不均匀造成的光谱失真,提高光谱数据保真度,实现星载成像光谱仪在地物识别、环境监测等应用领域高保真的目标,为实现升级光谱遥感技术高精准性的需求,提供参考案例和技术积累。
猜你喜欢
科学大众(2022年17期)2022-09-22 01:37:50
东坡赤壁诗词(2021年2期)2021-06-01 01:28:36
学生天地(2019年29期)2019-08-25 08:52:16
大观(书画家)(2018年6期)2018-07-08 00:43:10
光学精密工程(2016年6期)2016-11-07 09:08:20
光学精密工程(2016年5期)2016-11-07 09:06:10
数学物理学报(2016年5期)2016-08-24 07:38:38
油气地质与采收率(2014年6期)2014-12-16 17:45:18
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11 01:45:56
河南科技(2014年11期)2014-02-27 14:09:42