
基于多体动力学的六足机器人快速步态研究
2021-06-08 22:00刘罡汪俊锋
广西科技大学学报 2021年2期
刘罡 汪俊锋


摘 要: 实现六足机器人步态控制的前提是能够准确进行步态建模.本文提出一种基于多体动力学的六足机器人三角步态仿真模型,该模型由Simulink 中的SimMechanics 模块所建立,主要包括力模型和控制器模型.力模型针对足和接触地面的作用力与反作用力,控制器模型用来模拟六足机器人在行走时具有仿昆虫的行走特征.本文选用昆虫常见的三角步态来进行仿真研究,该模型成功执行了六足机器人的步態,验证了模型的有效性.
关键词:多体动力学;动力学仿真模块;六足机器人;快速步态
中图分类号:TP242DOI:10.16375/j.cnki.cn45-1395/t.2021.02.009
0引言
机器人被设计出来完成各种复杂动作,例如行走、攀爬、跨越障碍物等[1-3].传统的轮式机器人需要在铺好的表面(或至少是规则的)才能移动. 然而,超过50%的陆地无法进入轮式机器人,即使是全地形机器人,也只能超越小障碍,但代价是能耗高[4-6].
足式运动系统在自然地形中具有优越的移动性,因为足式机器人对每只脚使用离散的立足点,而不是需要连续支撑表面. 因此,足式机器人可以在不规则的地形中移动,通过改变其腿的结构,以适应不规则表面.此外,脚可以根据地形条件在选定的点与地面建立接触.针对六足机器人的步态研究多集中在步态规划和运动分析方面,通过在ADAMS环境中建立多体动力学建模进行研究,但是完全通过Matlab环境的SimMechanics模块来研究步态的很少[7-9].
本文设计了受六足昆虫启发的机器人机械结构,通过构建动力学模型并设计三角步态相关参数,在动力学仿真模型下成功实现所研究机器人的运动.
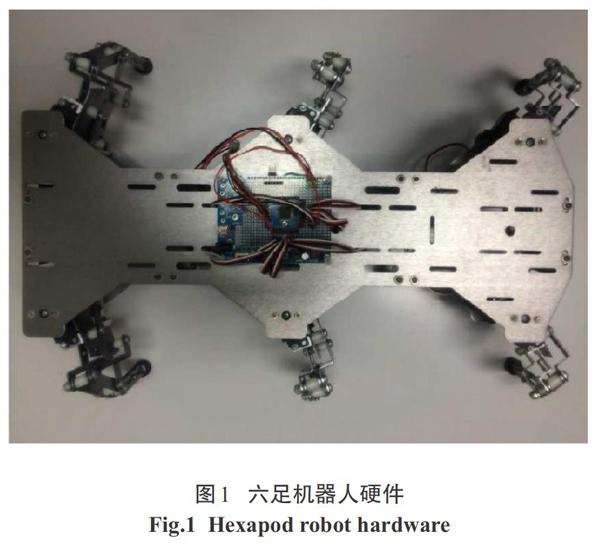
1六足机器人金属结构
如图1所示,采用一种铝合金材质结构六足机器人作为建模对象.此机器人上下铝合金大板由前后两块小铝合金板所支撑,两侧各由两块小铝合金板加以固定,整个主体中间以一块小铝合金板加强支撑,两侧空间安装有机器人的6只足和12个舵机.机器人整体长度50 cm,最大宽度38 cm,总质量1.98 kg.每个足水平旋转一个自由度,垂直旋转一个自由度.
2动力学模型
六足机器人模型如图2所示,躯干部分为中间的Body,6个可旋转的关节Revolute Joint连接在躯干的两侧,6个足分别和6个Revolute Joint连接,其中L1、L2、L3分别代表机器人左侧的前、中、后脚,R1、R2、R3分别代表机器人右侧的前、中、后脚.把机器人坐标系的原点定在机器人躯干的质心位置,机器人躯干的坐标以相对此点的位置来建模;然后再定义6个Revolute Joint的坐标,根据6个连接关节坐标再建立6个足的模型.
利用6个Revolute Joint坐标作为参考点,依据此点的相对坐标设计六足机器人旋转示意图(见图3)、脚的结构模型图(见图4).AB、BC、CD 和DE、EF、FG 杆件为2个四连杆机构,HI 杆件作为脚和地面接触的部分,透过伺服电机驱动AB 杆件,在连杆作用下,进而使HI 杆件做向上向下运动,来达到六足机器人每支脚做抬起、放下的动作.通过参考点相对位置建立接地部分Body,然后在Body上定义所连接的关节坐标,通过关节的相对坐标来完成脚结构模型[10-13].
每一只脚水平旋转一个自由度,每只脚可以水平向前向后任意旋转,但是需要注意脚与脚之间的干涉问题,若是脚与脚都旋转180°,则一定会发生碰撞.以不互相干涉为原则,每只脚最大摆幅的角度约为90°.在舵机旋转至中间位置时,六足机器人的下铝合金板到地面约7.25 cm;当每只脚做抬起的动作时,舵机垂直向下旋转90°,使六足机器人主体相对压低,六足机器人的下铝合金板到地面约6.5 cm;而每只脚做放下的动作时,舵机垂直向上旋转90°,使六足机器人主体相对抬高,六足机器人的下铝合金板到地面约8 cm.结合上述腿的水平和垂直运动,机器人能够向前移动,运动态势图见图5.
六足机器人与地面接触的部分就是足,足和地面的接触模型简化为两点之间的运动,把这个系统简化为弹簧阻尼系统,在X、Y、Z 3个方向的模型设计为弹簧和阻尼器的并联结构,如图6所示.图中2个黑点记为P点和当前足PFoot,分别为足与地面接触点和当前足的位置.
足与地面接触的反作用力由以下部分组成:接触点的位置和足的速度.如式(1)所示.
[FFoot=FFootXFFootYFFootZ=]
[KGround×PX-PFootX-CGround×VFootXKGround×PY-PFootY-CGround×VFootYKGround×PZ-PFootZ-CGround×VFootZ] (1)
其中:KGround为地面的弹性系数;CGround为地面的阻尼系数;设KGround=1 000,CGround=0;足端力FFoot在X、Y、Z 3个方向分量分别为FFootX、FFootY、FFootZ;P点在X、Y、Z 3个方向分量分别为PX、PY、PZ;当前足PFoot在X、Y、Z 3个方向分量分别为PFootX、PFootY、PFootZ;足的移动速度VFoot在X、Y、Z 3个方向分量分别为VFootX、VFootY、VFootZ.计算流程图 见图7.
3快速步态控制器设计
昆虫是行走机器人的绝佳模型,因为昆虫可以在各种地形中行走,而且对昆虫的行为和神经生物学研究已经揭示了许多神经机械机制,这些机制构成了适应性行为的基础.腿的基本运动由动力冲程(power stroke)和返回冲程(return stroke)两部分组成.在动力冲程中,腿的运动不仅取决于腿本身的感觉神经系统,还取决于其他支撑腿的运动,因为它们之间存在机械耦合.相比之下,返回冲程中的运动是由腿本身的感觉-神经系统单独控制的.昆虫的腿通过站立阶段和摆动阶段的交替来推动身体.一条腿在站立阶段与地面接触,在此期间它支撑并推动身体.在摆动阶段,一条腿不接触地面,在此期间,它从站立阶段结束时的位置(后极端位置,posterior extreme position)回到站立阶段开始时的位置(前极端位置,anterior extreme position)[14].三角步态属于行走速度较快的步伐,在其行走过程中,一次抬起3只脚并往前摆动,分別为同侧的前、后脚以及对侧的中间脚,而其他3只脚则负责支撑整个身体,这6只脚可形成2个三角形,连续替换可形成一个完整的步伐周期,其power stroke 的动作时间等于return stroke 动作时间.图8为机器人在12 s所走的三角步态,图中波峰代表脚在做return stroke的动作,波谷代表脚在做power stroke 的动作.所以从图8可看出开始由L1、L3、R2 做power stroke 的动作,R1、R3、L2 做return stroke 的动作.通过SimMechanics模块建立六足机器人三维建模图(见图9).
4仿真結果分析
图10表示机器人身体在X、Y方向的位置,可知身体在X方向一直前进,在Y方向往左偏,并有曲折现象.由于机器人做三角步态移动时,同一时间只有同侧的前后以及对侧中间脚支撑,所以造成左右摇摆.由图10(c)看出Z方向曲线开始有往下掉的部分,是因为启动时受重力作用下沉,之后每隔2 s有类似脉动曲线产生,这是由于6只脚做重复运动.
6只脚X方向的反作用力如图11—图14所示.图11是六足机器人的左前方脚L1和右前方脚R1的反作用力,可以看出正的反作用力较多,表示推动机器人前进的力.图12为机器人左边中间脚L2及右边中间脚R2的反作用力,可以看出负的反作用力较多,表示有使机器人减速的力.图13为机器人左后方脚L3及右后方脚R3的反作用力,可以看出正的反作用力较多,表示推动机器人前进的力.当L1、L3、R2 开始做power stroke 的时候,脚碰地开始往后摆来带动身体往前.这3只脚X、Y 方向的反作用力对身体所造成的总力矩一开始呈现往左转的情况,到达2 s后运动状态改变,改由R1、R3、L2 开始做power stroke 而使身体往右转,而这3只脚的反作用力对身体所造成的总力矩,约每2 s轮替,见图14.
6只脚Y方向的反作用力如图15—图17所示.由图15看出左前方脚L1负的反作用力较多,也就是往右偏的力量大,而右前方脚R1正的反作用力较多,也就是左偏的力量较大.由图16看出左边中间脚L2负的反作用力较多,也就是往右偏的力量大,而右边中间脚R2正的反作用力较多,也就是左偏的力量较大.由图17看出左后方脚L3负的反作用力较多,也就是往右偏的力量大,而右后方脚R3正的反作用力较多,也就是左偏的力量较大.
5结论
本文分析了六足机器人的多体动力学模型:在SimMechanics环境下建立模型;通过脚与地面的接触情况,计算出摩擦力和反作用力,从而完成步态运动;针对快速步态的代表之一三角步态进行仿真,仿真结果表明,建立的模型能够正确表现机器人的行为能力.此研究为后续六足机器人的自由步态研究打下了基础.
参考文献
[1] 毛志贤,韦建军,王春宝,等.新型四臂扶持式康复机器人设计[J].广西科技大学学报,2020,31(3):1-7.
[2] 王晓琳,陆绍辉,李东平,等.一种轻型碳纤维爬索机器人及其检测系统研究[J].广西科技大学学报,2017,28(4):25-31.
[3] MAO L H,GAO F,TIAN Y,et al.Novel method for preventing shin-collisions in six-legged robots by utilising a robot-terrain interference model[J].Mechanism and Machine Theory,2020,151:103897.
[4] MAO L H,TIAN Y,GAO F,et al.Novel method of gait switching in six-legged robot walking on continuous-nondifferentiable terrain by utilizing stability and interference criteria[J].Science China-Technological Sciences, 2020,63(12):2527-2540.
[5] MAHAPATRA A,ROY S S,PRATIHAR D K.Optimal feet-forces' and torque distributions of six-legged robot maneuvering on various terrains[J].Robotica,2019,38(6):1-23.
[6] ZHAI S,JIN B,CHENG Y L.Mechanical design and gait optimization of hydraulic hexapod robot based on energy conservation[J].Applied Sciences,2020,10(11):3884.
[7] 金振林,张金柱,高峰.一种消防六足机器人及其腿部机构运动学分析[J].中国机械工程,2016,27(7):865-871.
[8] 艾青林,徐冬,张立彬.基于阻抗特性的六足机器人动态稳定性[J].中国机械工程, 2017, 28(24):2981-2989.
[9] CHEAH W,KHALILI H H,ARVIN F,et al.Advanced motions for hexapods[J].International Journal of Advanced Robotic Systems,2019,16(2):172988141984153. DOI: 10.1177/1729881419841537.
[10] SORIN M O,NITULESCU M. The modeling of the hexapod mobile robot leg and associated interpolated movements while stepping[C]//2012 16th International Conference on System Theory,Control and Computing(ICSTCC). IEEE,2012.
[11] NITULESCU M,IVANESCU M,NGUYEN H V D,et al. Designing the legs of a hexapod robot[C]//2016 20th International Conference on System Theory,Control and Computing(ICSTCC). IEEE,2016.
[12] BARAI R K,SAHA P,MANDAL A. SMART-HexBot:a simulation,modeling,analysis and research tool for hexapod robot in virtual reality and simulink[C]//Proceedings of Conference on Advances in Robotics,2013. DOI:10.1145/2506095.2506126.
[13] OLARU S M,NITULESCU M. Modelling of the hexapod mobile robot leg using matlab simmechanics[C]. Advances in Robot Design and Intelligent Control. Berlin:Springer International Publishing,2016.
[14] 李滿宏,张明路,张建华,等.六足机器人关键技术综述[J].机械设计,2015,32(10):5-12.
Study on fast gait of hexapod robot based on multi-body dynamics
LIU Gang, WANG Junfeng
(School of Advanced Manufacturing Engineering, Hefei University, Hefei 230601, China)
Abstract: The premise of realizing gait control of hexapod robot is that it can accurately model gait. We propose a simulation model of hexapod robot triangular gait based on multibody dynamics. The model is established by the SimMechanics module in the Simulink, which mainly includes the force model and the controller model. Force and reaction force of force model against foot and contact ground is designed, and the controller model is used to simulate the walking characteristics of thehexapod robot when walking. In this paper, the common triangular gait of insects is selected forsimulation. The model successfully performs the gait of hexapod robot and verifies the validity of the model.
Key words: multi-body dynamics; SimMechanics; hexapod robot; fast gait
收稿日期:2020-12-09
基金项目:安徽省科技重大专项(18030901009);安徽高校自然科学研究项目重点项目(KJ2019A0839);合肥学院科学研究发展
基金项目(20ZR01ZDA)资助.
作者简介:刘罡,硕士,讲师,研究方向:机器人技术,E-mail:liugango@hfuu.edu.cn.
