
空间平台主被动激光探测技术研究
2021-06-08 09:28:20王宝玉
应用光学 2021年3期
邓 全,王宝玉,马 敏,牛 群
(中国电子科技集团公司第二十七研究所,河南 郑州 450047)
引言
随着航天技术的飞速发展,外层空间正成为新的军事研究热点,空间攻防势必会成为新军事变革下的重要领域。在空间攻防体系中,空间目标的态势感知、信息获取是赢得主动、夺取制天权的前提和关键。当前,美国、欧空局、俄罗斯、日本等持续开展空间自主探测技术研究,其中天基激光探测技术是有效且重要手段之一。
主动激光探测技术主要指激光雷达(light detection and ranging,LIDAR)技术,具有波束窄、抗干扰能力强、测量精度高等优势[1]。天基激光雷达可以在给定区域内实现对空间目标(包括合作目标、非合作目标)的搜索、跟踪、测量,实时获取目标三维空间信息;被动激光探测技术主要指激光告警(laser warming)技术,能够快速识别敌方激光来袭方向,判别威胁程度,实施探测告警,从而引导我方平台及时采取必要防御措施[2-3]。
从空间攻防角度考虑,如何远距离、大视场辨别敌我目标,如何对空间目标进行侦察、测量,这是空间信息获取的首要问题。显然,上述问题的解决,不能单一、分裂地进行激光雷达、激光告警技术研究,而应将这两种主、被动激光探测技术统一考虑,进一步加强系统架构设计。这对于提高天基平台主动防护能力、提升空间探测水平具有重要意义。
1 激光探测原理概述
作为主动探测设备,激光雷达种类多样,以距离信息的获取方式分类,可分为连续波和脉冲式两种,其中脉冲式又可分为扫描式和非扫描式。连续波式激光雷达通过计算发射激光与接收激光之间的相位差间接得到激光飞行时间(time of flight,TOF),而脉冲式激光雷达则通过测量发射激光与接收激光之间的时间差直接得到TOF[4]。连续波式激光雷达的精度高(一般为mm量级),但因其测程较近,不适合空间攻防应用场合。
脉冲扫描式激光雷达发射预定功率的窄脉冲激光束,通过扫描装置对预定区域进行大视场(10°×10°)逐点扫描,目标反射的回波信号经光学天线汇聚后被光电探测器接收并处理,通过测量TOF时间差得到距离信息,再通过读取该时刻扫描机构角编码器得到俯仰、方位信息。经过不间断地空间二维扫描,得到区域内目标的点阵数据,经数据解算后提取目标特征。当完成目标搜索、捕获后,激光雷达就转入跟踪状态。跟踪模式下,激光雷达以小视场(1°×1°)继续扫描目标,同时提取目标脱靶量,不断修正角度跟踪中心。至此,激光雷达完成对目标的搜索、确认、跟踪,对外输出目标的三维信息(ρ,α,β)。脉冲扫描式激光雷达由于束散角较窄,能量相对集中,探测距离较远,缺点是体积重量、捕获时间、跟踪精度受到机械扫描机构的限制。脉冲扫描式激光雷达原理框图如图1所示,目标的搜索、捕获、跟踪示意图如图2所示。
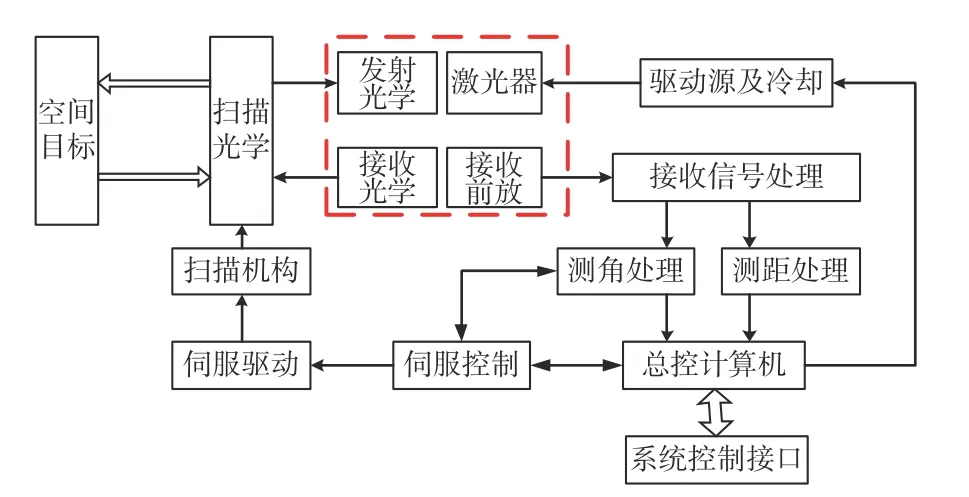
图1 扫描式激光雷达原理框图Fig.1 Block diagram of scanning LIDAR principle
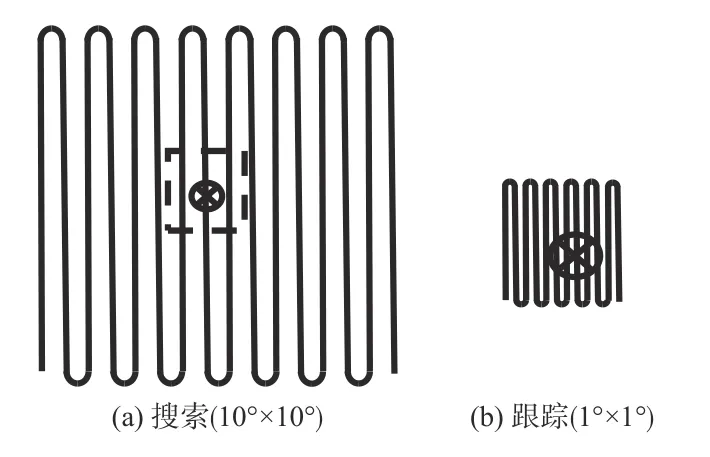
图2 目标搜索、捕获、跟踪示意图Fig.2 Schematic diagram of target search, capture and tracking
非扫描式激光雷达又称为闪光激光雷达。与采用单元探测器的扫描式激光雷达不同,非扫描式激光雷达主要采用面阵探测器接收激光回波。其主要工作过程为:在整机时序控制下,发射机发射一束激光脉冲,经光学扩束后照射到目标表面,被目标反射回的激光由接收光学系统汇集,面阵探测器同时完成对探测区域的多点测量,经处理形成激光雷达图像。非扫描式激光雷达为了使光斑能够覆盖目标表面,一般采用大束散角发射,一次发射可以获得多点测量结果,具有较高的探测速度,但因束散角大、能量分散导致探测距离较近,不适合空间攻防应用场合。
作为被动探测手段,星载激光告警设备一般采用静态凝视体制,大视场监视对方单程激光信号。当对方激光信号照射到告警设备后,经光学窗口汇集到光学探测器,信号经过光电转换、滤波、放大及数据处理,生成激光告警信息并上报我方平台,为后续采取应对措施提供信息支撑。星载激光告警设备功能组成及工作原理如图3所示。

图3 星载激光告警功能组成和工作原理Fig.3 Composition and working principle of space-borne laser warning function
星载激光告警设备由舱外告警探头和舱内处理单元两部分组成。告警视场和角度分辨力是激光告警设备的重要指标。当前,激光告警设备的探测器主要分为成像型和光谱识别型两种[3,5]。成像型多采用以CCD为核心的探测器,优点是可实现高精度方向分辨及波长识别,缺点是只能单波长工作,背景光较难控制且成本较高;光谱识别型多采用以光电二极管为核心的探测器,通过探测某个波长的激光能量来判别威胁,能够实现全方位、大范围的激光告警,技术相对成熟,缺点是角度分辨力较差。
2 国内外研究现状
天基激光探测技术作为对空间目标进行侦察、测量、告警的主要形式,已经成为各国研究发展的热点。一般而言,空间攻防体系的被测目标可分为非合作目标(如敌方卫星、飞船等)和合作目标(如我方角锥棱镜、面反射镜等)两类。
2.1 国外发展现状
2.1.1 针对非合作目标的空间激光雷达
SSLS激光雷达系统(spaceborne scanning lidar system)由加拿大Optech公司和MDA公司联合研制,是美国微卫星研究计划系列卫星XSS-11(已于2005年4月发射)的有效载荷之一,主要对空间非合作目标进行搜索、跟踪和测距[6]。SSLS激光雷达由光机头和电子舱两部分构成,采用两维振镜实现20°×20°的视场扫描。SSLS激光雷达实物如图4所示,其主要技术指标见表1。
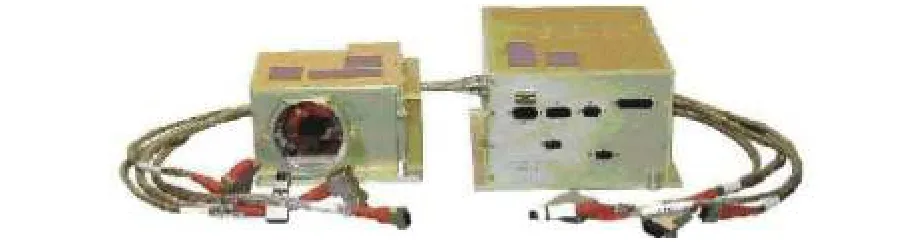
图4 SSLS激光雷达实物图[6]Fig.4 Physical photo of SSLS LIDAR[6]
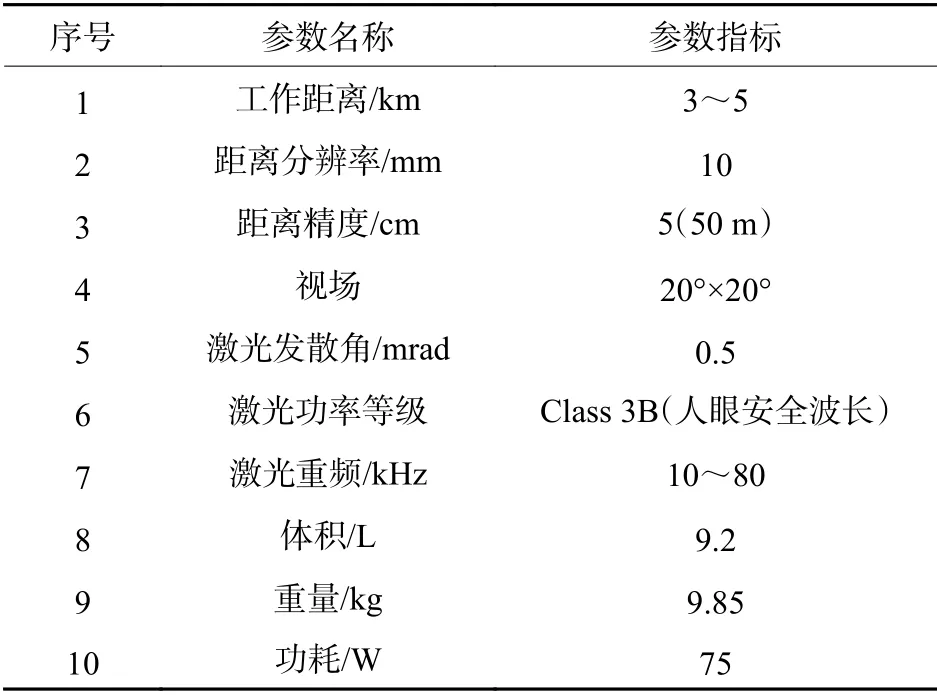
表1 SSLS激光雷达主要性能参数Table 1 Main performance parameters of SSLS LIDAR
2005年,美国AOS公司针对NASA对空间目标自主捕获、跟踪和测量的应用需求,研制了空间自主测量激光雷达(laser range and bearing finder,LRBF)。LRBF激光雷达针对空间非合作目标探测,采用直接探测体制,其结构示意图如图5所示,主要技术指标见表2。

图5 LRBF激光雷达结构示意图[6]Fig.5 Structure diagram of LRBF LIDAR[6]

表2 LRBF激光雷达主要性能参数Table 2 Main performance parameters of LRBF LIDAR
2.1.2 针对合作目标的空间激光雷达
2009年,德国Jena-Optronik公司设计研制的激光交会敏感器(rendezvous,RVS),搭载于日本的HTV-1货运飞船,完成了与国际空间站(ISS)的在轨试验任务。RVS是一种扫描式激光雷达,其结构简图如图6所示。其中RVSH为机头部分,RVSE为电子舱部分。RVS采用单元探测器结合互相垂直的双摆镜扫描,搜索安装在实验舱的角反射器阵列(合作目标),依靠合作目标在三维图像中的位置和角度计算HTV飞船和空间站的相对位姿。截止到2017年,RVS分别搭载在美国、日本和欧盟的19种航天器上,成功完成了40次与国际空间站自主交会的姿态测量任务[4]。表3为RVS主要技术指标。

图6 RVS结构简图[4]Fig.6 Structure diagram of RVS[4]

表3 RVS主要性能参数Table 3 Main performance parameters of RVS
得益于RVS的巨大成功,Jena-Optronik公司又研发了RVS的改进型RVS3000,并在2014年搭载于欧空局货运飞船ATV-5,成功完成了在轨测试。相对于RVS设备,RVS3000更换了新型光纤激光器,扫描装置更换为全数控万向节扫描镜,并缩小了体积和重量,这使其兼具了对非合作目标的相对位姿获取能力。改进后的RVS3000主要参数如表4所示。

表4 RVS3000主要性能参数Table 4 Main performance parameters of RVS3000
2.1.3 星载激光告警设备
根据公开报道,美国、俄罗斯等国均已开展过激光反卫星试验[7]。国际上对空间攻击和防御系统的研究已经持续了很长时间,其中美国的相关技术发展占据主导地位。1999年美国空军司令部发起研究“卫星受威胁与攻击告警(STW/AR)”系统,该系统采用星载传感器检测对航天器有威胁的激光干扰,并将截获的干扰特征向卫星地面站发出告警,使工作人员做出相应对策。2007年美国空军航天与导弹系统中心启动“自感知太空态势感知(SASSA)”计划,该计划是要研发“感知并确定”激光攻击技术,具有自感知能力[8]。
目前,由于激光反卫星武器受设备重量和能量补给等条件制约,强激光武器暂时还无法装载到天基平台。因此,星载激光告警设备主要是探测陆基强激光武器的激光威胁信号。但是,作为一种潜在的激光对抗平台,天基反卫星技术正在迅速发展[9]。
2.2 国内发展现状
根据公开报道,我国应用天基激光探测技术的产品主要有:2007年,发射了“嫦娥一号”激光高度计,用于月球表面的地形测量;2016年,发射了首台用于对地测绘的“资源三号”02星激光高度计[10]。我国空间交会对接任务中,相关单位研制的激光雷达采用基于合作目标的主动扫描成像探测方式,圆满完成天宫一/二号与神舟八号/九号/十号/十一号载人飞船的4次飞行任务,在轨共完成8次交会、6次对接任务[11]。
星载激光告警方面,哈尔滨工业大学研发的星载激光告警系统采用光学成像,通过转盘滤光片分光,采用PbSe和HgCdTe面阵探测器成像的方式。但由于该系统使用的探测器存在制冷问题,质量、体积和功耗较大。中科院上海技术物理研究所研制的激光告警系统具有大视场、多波段特点,覆盖了从近到远所有红外波段,视场角达到120°,然而信噪比较低,数据处理能力不强,需要改进[8]。
总体而言,近年来我国激光探测技术发展迅速,激光雷达及激光告警产品已经广泛应用于空基、海基、陆基平台,但受天基平台及太空环境制约,应用于空间的激光产品相对较少。
2.3 发展趋势
从上述资料分析,天基激光探测设备的使用越来越广泛。近年来,天基主被动激光探测技术有如下趋势:1)对合作目标、非合作目标的混合探测,典型产品如德国RVS3000;2)多波段告警,当前单一波段告警已经无法满足未来的作战需求;3)主被动激光复合探测,利用被动告警信息避险和粗引导,采取主动探测或干扰的方式,达到“快速机动、有效反制”的目的。目前,业界广泛开展了MEMS激光雷达、相控阵激光雷达、片上激光雷达等方面的研究,但受器件工艺水平、性能参数等限制,现阶段还无法应用到空间攻防领域。天基激光扫描机构大多仍采用二维机械扫描,主要还是考虑技术成熟度以及空间环境适应性等因素。
3 系统架构设计
3.1 体制选择
针对空间目标的探测,可以考虑:1)电视成像+激光测距,该方案具有较高的探测精度,缺点是阴影区系统无法工作,且容易受到背景光的强干扰,其应用受限;2)红外成像+激光测距,理论上该方案可以实现阴影区和阳照区全天时工作,缺点是红外相机受目标辐射特性影响较大,对低温、远距离目标的探测能力差,系统可用性不足。
结合空间攻防应用需求,考虑当前光电设备的可靠性、空间适应性等因素,本文拟采用主被动天基激光探测的方式实现对空间目标的搜索、跟踪和告警,其中主动探测技术选用脉冲扫描式激光雷达,被动探测技术采用光谱识别型激光告警设备。
3.2 架构设计及主要组成
天基平台空间攻防一方面要求能够主动探测对方,辨别敌我目标,另一方面还需被动探测对方是否有激光威胁信号,提前告警,采取规避措施。为此,在天基平台上共同搭载激光雷达、激光告警设备,充分发挥主被动天基激光探测技术的各自优势。天基平台激光探测系统架构示意图如图7所示。

图7 天基平台激光探测系统架构示意图Fig.7 Schematic diagram of laser detection system framework in space-based platform
激光雷达采用主动扫描成像体制,对空间目标进行大范围、高精度扫描成像,通过搜跟算法、图像识别等技术实现对目标的探测,主要包括激光发射机、收发光学、二维扫描机构、激光接收机以及信息处理机等。
星载告警设备包括对地激光告警和对空激光告警两种,对地告警是对陆基强激光武器进行探测、告警,对空告警是当其他空间目标使用激光时,根据探测到的光谱能量告警来袭方向、判别威胁类型(如激光测距、激光制导、激光通信等),其构成如前所述,不再赘述。
一般而言,角反射器阵列是无源光学元件,具有定向反射的特点[12],能够为激光探测提供较高的反射率(约为0.9)。考虑到空间攻防应用,本文设计有源可调制角反射器阵列,使用电控光电玻璃作为角反射器阵列的保护窗口,通过加载电压控制角反射器的开启或关闭。图8为可调制角反射器阵列示意图。
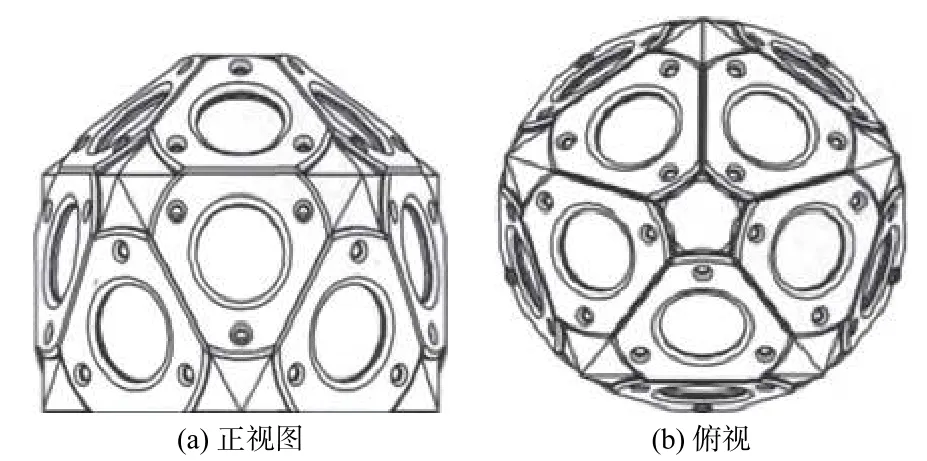
图8 可调制角反射器阵列示意图[12]Fig.8 Schematic diagram of modulated corner reflector array[12]
3.3 工作模式及流程
上电后,激光告警设备始终处于工作状态,大视场凝视探测空域内其他平台的激光信号。天基平台根据激光告警设备的探测信息,使激光雷达工作在3种不同模式。
1)当探测到对方激光为约定编码的激光信号时,可判定为我方目标。按照事先约定,双方激光雷达加电,分别开启可调制角反射器阵列,形成基于合作目标的应答探测模式。由于双方均探测单程激光,最小可探测功率与距离的平方成反比,因而能从更远距离建立合作测量关系,快速实现对目标的探测。这对于空间攻防中开展快捷交会对接继而完成空间维修、补给回收等任务具有重要意义。
2)当探测到对方激光为无规则激光信号时,可判定为敌方目标。天基平台一方面根据告警信息采取机动避让或主动干扰,另一方面将激光来袭方向作为粗引导信息,使激光雷达指向相应区域,开展基于非合作目标的空间探测。在此过程中,可调制角反射器处于关闭状态。当我方逼近敌方目标到一定距离时,天基平台突然开启角发射器阵列,瞬时反射强的激光回波,利用光电流的急剧增大造成敌方激光探测器的损伤甚至失效[13]。
3)当告警设备在空域内未探测到激光信号时,此时不再区分敌、我方目标。激光雷达输出大功率,根据扫描策略在大范围内进行基于非合作目标的成像探测,经数据解算、图像识别后,实现对非合作目标的搜索、捕获、跟踪。
4 关键技术
4.1 空间机动目标快速捕获、跟踪技术
窄波束激光实现大范围目标的捕获和跟踪,是天基激光雷达的技术难点之一。该项技术需要解决运动平台激光点阵扫描探测对空中机动目标的快速搜索、捕获问题。根据应用设想,本文拟采用激光告警信息作为粗引导,结合二维扫描机构,优化扫描速度、光斑重叠率等参数,研究最佳搜索、捕获、跟踪策略,研究运动图像的补偿、修正算法。
4.2 大功率、高重频激光发射技术
如何在空间环境下输出大功率、高重频、高质量光斑,是天基激光发射技术的难点和重点。这涉及激光器的工作体制、谐振腔、泵浦方式、温控、散热、耦合等一系列复杂的专业技术[14]。这些方面往往存在着相互约束的因素。近年来,光纤激光器和半导体泵浦激光器(DPSSL)是天基激光发射技术研究的热点。
4.3 空间强背景下高灵敏度接收机技术
接收机是激光雷达信号获取的关键部件,接收机的性能指标直接影响激光雷达的捕获、跟踪和测量性能。根据架构设想,天基激光雷达要具备对合作目标、非合作目标的混合目标探测能力,这就要求其必须具备高的灵敏度和大的动态范围。在空间环境下,接收机还需要解决背景光噪声抑制、温度补偿探测器增益起伏等问题。为适应混合目标探测,接收机可以考虑不同的时间增益控制曲线(TGC),同时采用脉冲信号互相关探测技术,以提高系统对微弱信号的处理能力。
4.4 小型化、高效率光束扫描技术
要实现窄束散角激光束的大空域探测,需要光束扫描机构实现激光大范围快速扫描。航天环境对体积、重量和功耗的苛刻限制,无疑增加了扫描机构的设计难度。要充分考虑到光束重叠率、扫描速度、测量精度及空间适应性等因素,综合分析摆镜扫描、转鼓扫描、光楔扫描等技术体制的优缺点和系统的适用性,通过模拟仿真计算、试验验证等方式研究新型扫描方法。
4.5 低虚警率、大视场激光告警技术
对航天器的攻击会被视为战争行为,因此天基激光告警设备要求有更低的虚警率指标,以免误判。天基激光告警设备在整个工作寿命期间是一直开机工作的,要在电磁环境恶劣的太空环境下,实现激光告警设备更低虚警率指标,就要从光学设计(窄带滤光、视场抑制)、信号滤波(耦合隔直、干扰剔除)、通道融合算法等多方面进行优化设计,确保大视场告警信息既不能漏报,也不可错报、误报[15]。
5 结束语
开展天基平台空间攻防研究,对于保证我国空间安全意义重大。本文通过对主被动天基激光探测的深入研究,提出了一种基于激光雷达和激光告警设备联合使用的架构设想。这种设想特别是应用模式的探索,具有较为明显的新颖性。当前,这种应用设想还受到诸如器件环境适应性、性能指标等制约因素的限制。但相信随着技术的不断进步,这种架构设想必定能逐步变为现实。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
国际太空(2022年1期)2022-03-09 06:04:40
汽车观察(2021年8期)2021-09-01 10:12:41
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
空间科学学报(2021年2期)2021-07-21 08:43:40
科学(2020年5期)2020-11-26 08:19:24
航天电子对抗(2019年4期)2019-06-02 08:22:50
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
