
基于5G输电线路无人机多源定位的智慧换电平台
2021-06-07 11:16周烨任彭劲樟
通信电源技术 2021年4期
张 帆,周烨任,邹 娟,彭劲樟
(国网湖北省电力有限公司 黄石供电公司,湖北 黄冈 438000)
0 引 言
近年来,我国电网快速发展,输电线路越来越长,电压等级也越来越高,输电线路经过很多复杂地形地貌区域。传统输电线路巡检方式以人工巡检为主,效率较低,很难进行全方位的巡检[1]。无人机作为国家电网巡线中的一种新型应用,避免了地形对巡检的限制,且费效比低,在输电线路巡检上的运用成为必然[2]。
现有旋翼无人机续航能力差,不能大范围覆盖电网的输电和配电线路。大多数多旋翼无人机都采用锂电池供电,锂电池具有反复使用、低放电率及长寿命的性能优势[3]。不过目前理论上重量为300 g的锂电池只能让500 g的无人机飞行17 min。为弥补现有无人机续航能力不足的问题,本研究提供一种旋翼无人机在空中自主便捷更换电池的平台,实现了无人机电量不足时自主寻找空中充电站进行便捷换电。
1 5G输电线路无人机多源定位智慧换电平台
本研究根据典型无人机组成及巡检功能要求,组织典型结构的布置方式,如通信模块、原有定位模块、加装视觉定位模块以及改装电池模块等,合理设计各部分于无人机本体的布置位置和布置高度等,在进行设计时与无人机本体各硬件的形态与使用空间等要求相匹配。本研究创新点及成果如下。一是搭建了一套基于5G的换电管理系统。二是研究并改进了一款具备长续航能力的旋翼无人机,且能够符合空中智能换电池的要求。三是开发一套完整成熟的无人机电池模块,实现电池的自动开锁和关锁功能,且电池外壳达到IP57级别防水等级。四是研究一套可折叠太阳能充电板式停机坪。五是通过视觉定位系统,保证无人机精准停在停机坪。六是开发一套机器手臂,可旋转定位、收起展开及拆装电池。
2 智慧换电平台设计与实现
2.1 无人机电池结构改造
当前旋翼无人机一般有多个电池模块,为了方便机器手臂自动更换每组电池,需改造电池结构部分。该部分为电子自动控制开关,内部装有微型直线电机伸缩作为卡扣来防止脱落,打开状态下电池可直接掉下,关闭状态下电池会被锁死卡在机身上。电池外壳本身经过改装后可达到IP57级别防水等级。
2.2 无人机多源定位模块
无人机在飞行到充电桩附近时,由于GPS的精度达不到厘米级别,且GPS无法满足无人机的上下高度控制需要,因此研究提出一种GPS融合摄像头双目视觉及超声波雷达定位的多源定位方案[4]。无人机机载低功耗小型双目视觉定位主要功能部件为一对双眼(模拟人眼)+超声波雷达[5]。该无人机视觉的装配示意如图1所示,尺寸长20 cm,高6 cm。
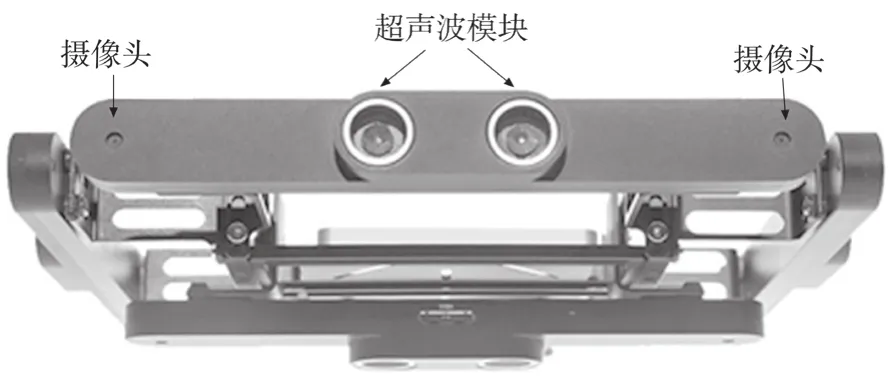
图1 系统装配示意图
在无人机执行任务时,该视觉系统将固定在无人机上用于定位目标。两摄像头将目标物图像传递到后台平板电脑,后台计算机上的立体视觉子系统通过这两幅二维图像,计算目标物在摄像头坐标系中的三维坐标,将其转换为在无人机坐标系中的三维坐标传给无人机本体上的嵌入式计算机,并由该嵌入式计算机完成检测装置的运动控制,控制检测装置运动到目标物位置,从而实现自动目标定位的功能[6]。系统结构如图2所示。
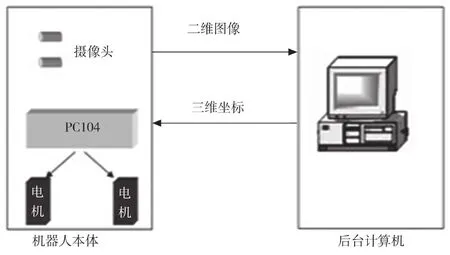
图2 系统装配示意图
2.3 无人机精准停靠算法模块
无人机长距离飞行过程中,依赖GPS定位实现路线规划。在飞行到充电桩附近时切换成视觉定位模块进行定位,整个过程采用RTK差分GPS+视觉+短距离传感器实现精准定位,不受电磁干扰[7]。
多旋翼无人机本身具有6个自由度,且各自由度之间具有耦合,因此该飞行系统实际上是一个多输入多输出的非线性系统[8]。
无人机的控制结构整体如图3所示,控制主要分为内环姿态控制和外环位置控制。整个控制流程为外层位置控制器根据目标位置信息和反馈得到的无人机当前位置误差,计算位置控制量。姿态控制器根据目标角度与当前角度之间的误差计算出角度控制量,驱使无人机完成相应位姿运动[9]。

图3 控制结构图
2.4 可折叠太阳能充电板式停机坪
本项目中,太阳能充电板与停机坪融合。为了减少高空风吹的面积,研究实现了其可折叠功能,在非充电时间内折叠起来,避免风吹雨打导致结构、方向变化。充电太阳能板提供12~36 V电压,且尺寸最大可调整达到1.5 m。
2.5 无人机电池充电桩
机器手臂将旧电池卸下放置到固定位置卡槽里,太阳能充电板可给电池充电,充满电后自动断开电流。中控后台掌握每块电池电量信息,每个充电桩负责收集电池电量,统一通过5G通信发送到中控后台。若电池电量降低到预定值,那么中控后台可发出命令,再次补充充电。
2.6 自动更换电池的机器手臂
无人机精准停靠在充电桩托盘上后,通过机器手臂和视觉定位来执行更换电池操作。机器手臂自动调整角度将旧电池拆下来更换为新电池。更换结束后,无人机可以飞走。机器手臂操作过程所需要的电源来源于充电桩。
机器手臂前端加装一个微型摄像头用于定位,加装一个吸盘用于抓取电池模块,其内部控制器如图4所示。
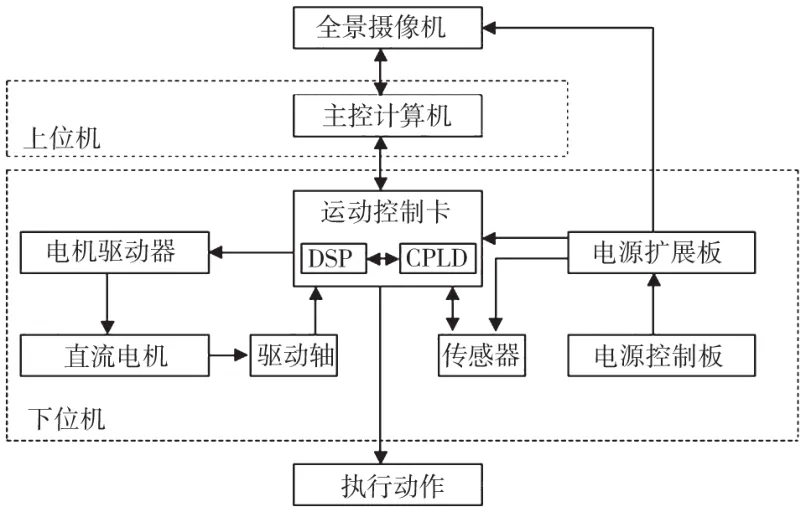
图4 机器手臂内部控制器
2.7 换电系统防雷装置
为了保证空中换电系统安全稳定运行,需要加装防雷装置,其由接闪器、引下线以及接地装置3个部分组成。其中,接闪器为直径d=10~12 mm,长L=l~2 m的钢棒,或为截面S不小于35 mm2的钢绞线(避雷导线),架设在一定高度起引雷作用。接地引下线将雷电流安全导入埋于地中的接地体,因而应保证其在强大的雷电流通过时不熔化,一般用直径6 mm的圆钢,或截面不小于25 mm2的镀锌钢绞线。当用钢筋混凝土杆、钢结构用支持物时,可用钢筋作接地引下线。
2.8 远程视频传输和设备管理
研究基于5G输电线路视频传输和无线控制系统,采用H.264视频压缩技术,在5G无线网络技术下于中控室后台看到清晰、流畅的线路视频图像[10]。本研究还配置全方位无盲点工业摄像机,能够对绝缘子串、导线、地线、杆塔、线路走廊以及杆塔周围环境等进行全方位无盲点的监视,并无线控制无人机。中控后台实现统一管理所有的设备,包含无人机、充电桩、机器手臂以及旧电池状态。所有设备都通过充电桩入网,中控后台可以实时查看并控制系统所有物联网设备。
3 结 论
本研究在基于5G输电线路无人机多源定位智慧换电平台整体结构设计上,以小型化为目标提高产品部件的集成度,降低产品重量和体积,满足充电桩灵活性要求。同时,应用新型的驱动转向结构,提高无人机运动能力和运行速度,满足高效率巡检要求。目前,基于5G输电线路无人机多源定位智慧换电平台的研究仍处于初步实践阶段,还需进一步提高换电平台的控制稳定性,做好在电力线路应用中的标准化工作流程及安全控制措施,实现无人机长途巡线和设备定点检查等应用任务。
猜你喜欢
汽车实用技术(2022年13期)2022-07-19
汽车观察(2021年6期)2021-11-20
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
新能源汽车报(2020年32期)2020-09-27
新能源汽车报(2020年26期)2020-08-04
电子制作(2019年10期)2019-06-17
电子制作(2019年9期)2019-05-30
文化交流(2019年1期)2019-01-11
读者·校园版(2018年3期)2018-01-18
