
全电控挖掘机个性化操作控制策略的研究
2021-06-06 06:43:23董必成
内燃机与配件 2021年9期
关键词:控制策略

摘要:针对不同区域、不同工况、不同使用者对使用情况的差异,提出一套全电控挖掘机的个性化操作的控制方案,详细介绍了先导比例阀的控制策略,试验证明本方案及控制策略能满足全电控挖掘机在实际工作中使用者对个性化操作使用的要求。
关键词:全电控挖掘机;个性化操作;控制策略
中图分类号:TH134 文献标识码:A 文章编号:1674-957X(2021)09-0224-02
0 引言
挖掘机使用工况复杂,不同区域、不同工况、不同操作手的使用习惯差异较大,传统的液控系统的挖掘机的整机动作之间的关系控制基本上都是通过更换不同规格的逻辑阀来实现,通常同一款机器的操作性能很难满足多位操作手的使用需求。在全電控液压挖掘机上,整机所有动作均有控制系统控制,这样就为个性化操作的控制提供了可能。本文详细介绍了全电控挖掘机个性化操作的控制方案、先导信号的采集、先导比例阀电流的控制策略及实际控制效果的分析。
1 全电控挖掘机系统简介
全电子控制挖掘机系统包含4大组件:①带分控的电磁阀的主泵;②电控先导手柄和电脚踏;③阀盖端集成比例电磁阀的电控主阀;④满足控制性能要求的电子控制器[1]。
全电控挖掘机系统的特点就是操作手所有的操作意图都是通过电手柄传输给控制器,控制器再根据电手柄传输的信号的大小来对应操作角度的大小,从而对相应的对先导比例阀和电控泵进行控制。本文所述的控制方法适用于搭载全电控系统的挖掘机。
2 整机个性化操作控制方案
本方案属于人机交互的一种,因此需要在仪表设置专门的界面便于用户的设置,通过设别出不同工况下用户的使用习惯整合出如表1的优先关系。
本方案采用的电手柄为电压信号输入,电手柄的输出的电压大小和供电电压成百分比关系,因此在采集输出的电压大小时需要同时对比当前供电电压,并且该手柄在同一角度对应的输出电压是有2.5-3%的误差的,所以为了保证动作的连续还需要设置一定的阈值,防止动作的不连贯。这种电手柄好处在于性能可靠,技术成熟但为了提高系统的安全性,防止由于线路的故障导致整机动作的异常,造成安全事故,需要对输出电压值上下边界进行限制。
全电控挖掘机的工作原理为控制器接收到电手柄的有效信号后,通过插值等方式计算出对应动作的先导比例阀的电流,从通过控制先导压力的大小来控制阀芯开口的大小,达到控制流向工作装置的流量大小的目的。由此可见工作装置的动作与否和动作速度的快慢在主泵输出流量一定的情况下由先导电磁比例阀的电流大小来决定,电流越大,比例阀产生的先导压力越大,阀芯开口越大,流量越大,动作速度越快,反之则速度越慢,因此动作的优先关系可以通过限制对应动作的比例阀电流的大小来实现。本方案选择的电磁比例阀的特性如下,死区电流约为 150mA,有效电流区间在 325-750mA 之间,整个电流有效区的特性基本上是线性的,这样的好处在于整个动作的可控性强,操作舒适。
通过以上分析,得出个性化操作的控制方案,如下: 控制器采集仪表的信号,得出用户想要的对应的动作的优先度,根据优先度插值得出对应比例阀的电流限制值;与此同时,控制器采集手柄信号,通过滤波、阈值和幅值比较、线性插值方式等一系列的判断和运算得出当前的用户的操作,根据当前操作通过一系列运算得出在不进行优先控制的时候的比例阀电流值,再与当前设定的优先等级计算的被优先控制的比例阀电流值进行比较计算得出最终应该输出给比例阀的电流值,通过 PID 控制调节比例阀电流值来控制比例阀的出口压力,从而控制主控阀的流量,达到限制对应动作速度的目的。
3 电手柄信号的采集
由以上控制方案和电手柄特性分析可知,电手柄信号的采集与分析是整个控制策略实施的前提和基础,若手柄的电信号采集出现偏差,不仅会影响该控制方案,也有可能会造成动作误判,造成危害。所以必须采用滤波的措施对噪声信号进行滤除,滤波方式主要有两种:数字滤波和模拟滤波两种,数字滤波是用软件算法实现的,不需要增加硬件设备,可以根据信号的类型采用不同的滤波算法和参数,考虑到手柄的杂波主要由整机振动和人手的不自觉的抖动引起的,具有一定的周期性和偶然性,所以本文针对性的采用以下两种数字滤波方法。
3.1 滑动平均滤波 滑动平均滤波的样本数是随着采样的过程在时刻变化的,采用先进先出的原则,即把n个采样数据看成一个队列,队列的长度固定为n,每进行一次新的采样,把采样结果放入队尾,而扔掉原来队首的一次数据,在计算滤波值时再把队列中的n个数据进行算术平均得到新的滤波值[2]。
滑动平均滤波的特点突出,即对周期性干扰有良好的抑制作用,平滑度高,能够有效抑制由于整机振动引起的手柄信号的变化,但是缺点是对于人手的不自觉的抖动引起的偶发干扰效果较差,因此需要引入另外一种数字滤波方式。
3.2 中位值滤波 中位值滤波是指在某一采样时刻 (采样点), 对某一被测参数连续采样n次,然后把n次采样值按大小排队,取中间值作为本次采样值[2]。
中位值滤波法的主要好处在于能够滤除偶发干扰,这对由于人手的抖动引起的手柄信号的噪声干扰效果明显。
结合以上两种滤波方式,能够有效地抑制杂波引起的电手柄信号失真的问题,保证电手柄信号的真实、稳定、可靠。
4 个性化操作功能控制策略
控制程序流程图如图1所示。
控制器首先采集电手柄的信号和仪表发送的个性化操作的信息,并且依据手柄的开度信息计算出所有比例阀电流I1和根据仪表发送的优先度的信息计算出对应被优先动作的比例阀的最大电流Ilim;若当前操作手操作的动作有符合控制器接收到的需要进行优先控制的动作时,对比I1和Ilim,当I1<Ilim时,输出给对应动作的比例阀的电流I=I1,否则I=Ilim。
5 先导比例阀电流控制策略
对于先导比例阀的电流的控制采用斜坡+限幅增量式PID。
斜坡控制的原理实际上就是取得理论计算的目标电流It后,对比前一次輸出的电流Ip,并且设定上升步长k1和下降步长k2。当It>Ip+k1时,实际目标电流I=Ip+k1,否则I=It;当It>Ip-k2时,实际目标电流I=It,否则I=Ip+k2,本系统中k1=4,k2=7。这样做的目的是防止动作突变时,计算得到的目标电流突变过大,造成调节时间过长,动作冲击、延迟等现象,同时加上也有助于动作的转换的平稳。
增量式 PID 结合限幅的方式对最终传递给比例阀的电流进行控制,其算法如式(1)、式(2):
式中,?驻表示增量;ek表示第k次比例阀实际目标电流值;ek-1表示第 k-1次比例阀实际目标电流值;ek-2表示第k-2次比例阀实际目标电流值; Kp表示比例项系数,本系统取1.0;Ki表示积分项系数,本系统取0.4;Kd表示微分项系数,本系统取-0.7;?准表示限幅量,本系统取50。
采用增量式 PID 控制好处在于能够提高比例阀电流的稳定时间,电流能够较快速的达到想要得到的目标电流,但是缺点是会使得电流上升或者下降过于快速,阀芯的开口的快速的变化,甚至调节过程中阀芯开口发生较大的变化,引起主控阀的流量产生急剧变化,导致动作的冲击和不连贯,为了避免这种现象的发生,对计算得到值进行限幅,保证输出给比例阀的电流不至于产生较大的变化,始终保持在合理的区间内。
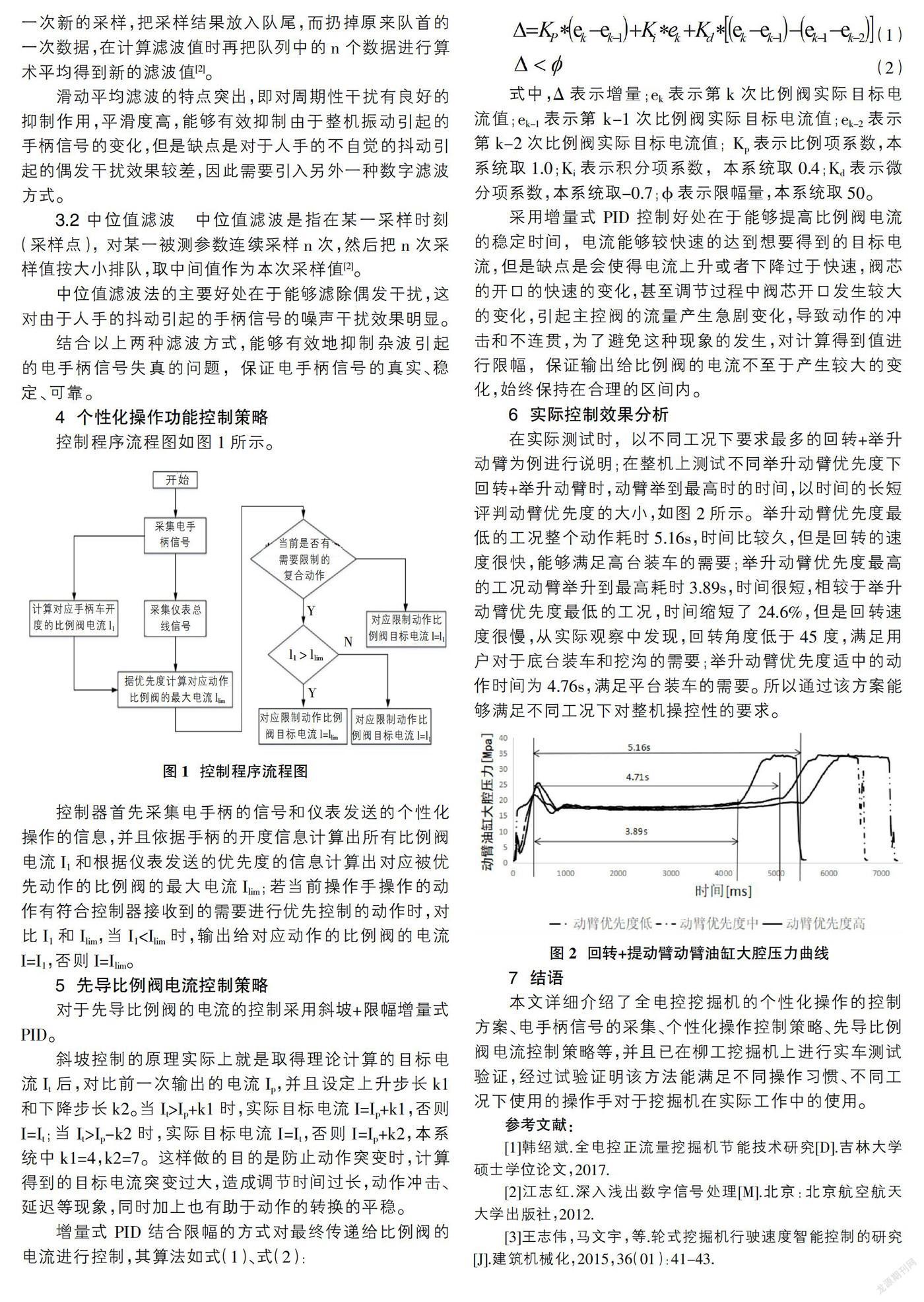
6 实际控制效果分析
在实际测试时,以不同工况下要求最多的回转+举升动臂为例进行说明;在整机上测试不同举升动臂优先度下回转+举升动臂时,动臂举到最高时的时间,以时间的长短评判动臂优先度的大小,如图2所示。举升动臂优先度最低的工况整个动作耗时5.16s,时间比较久,但是回转的速度很快,能够满足高台装车的需要;举升动臂优先度最高的工况动臂举升到最高耗时3.89s,时间很短,相较于举升动臂优先度最低的工况,时间缩短了24.6%,但是回转速度很慢,从实际观察中发现,回转角度低于45度,满足用户对于底台装车和挖沟的需要;举升动臂优先度适中的动作时间为4.76s,满足平台装车的需要。所以通过该方案能够满足不同工况下对整机操控性的要求。
7 结语
本文详细介绍了全电控挖掘机的个性化操作的控制方案、电手柄信号的采集、个性化操作控制策略、先导比例阀电流控制策略等,并且已在柳工挖掘机上进行实车测试验证,经过试验证明该方法能满足不同操作习惯、不同工况下使用的操作手对于挖掘机在实际工作中的使用。
参考文献:
[1]韩绍斌.全电控正流量挖掘机节能技术研究[D].吉林大学硕士学位论文,2017.
[2]江志红.深入浅出数字信号处理[M].北京:北京航空航天 大学出版社,2012.
[3]王志伟,马文宇,等.轮式挖掘机行驶速度智能控制的研究[J].建筑机械化,2015,36(01):41-43.
作者简介:董必成(1989-),男,安徽六安人,工程师,硕士研究生,研究方向为工程机械电子控制系统。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:38:36
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
山东工业技术(2016年15期)2016-12-01 05:31:37
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2016年20期)2016-04-11 11:38:24
通信电源技术(2016年5期)2016-03-22 01:09:38
电机与控制应用(2015年2期)2015-03-01 03:49:24
电测与仪表(2014年24期)2014-04-09 11:35:36
