
一种新型金属3D打印设备支架的优化与模态分析
2021-06-06 09:23:08王炎
精密制造与自动化 2021年2期
王 炎
(上海探真激光技术有限公司 上海200093)
目前,金属3D打印设备正朝着大尺寸、高精度、高效率的方向发展。十字运动机构由于其精度高、运动速度快、紧凑的结构设计等特点,在金属3D打印运动机构中被广泛的应用[1-2]。
十字运动机构结构设计中,连接支架的设计尤为重要,为了保证运动机构的稳定性,采用有限元模态分析方法对支架进行优化和模态分析[3]。模态分析可以使机械结构设计避开共振或以特定的频率产生振动;此外,通过模态分析可以认识到机械结构对于不同类型的动力载荷是如何响应[4-5]。由模态分析结果可以得出十字运动机构的支架振动位移分布规律,且找出支架变形较大的位置,然后对机架过度设计部分进行优化设计,达到减少部件形变、降低噪音和防止共振的目的。
基于ANSYS Workbench软件对十字运动机构连接支架进行静力学分析,对支架进行优化设计,并对优化后的支架进行模态分析。采用这种设计方式,对同类型十字运动机构优化具有一定的参考意义。
1 新型金属3D打印设备的组成
金属3D打印技术在制造领域中是最具潜力的技术之一[6]。新型龙门式金属 3D打印设备的运动是通过十字运动机构来实现,该设备具有精度高、零件成型尺寸大等优点。设备工作时,传动方式主要是通过电动机驱动减速器和丝杆滑块机构,使金属粉末打印喷头按照零件切片后处理所生成的加工路径程序,并作用于工作台上,打印喷头逐层打印成型零件,从而实现设备的3D打印。新型龙门式金属3D打印设备的结构组成,如图1所示。

图1 新型龙门式金属3D打印设备示意图
十字运动机构作为增材设备的重要组成部分,其自身进给系统静态和动态特性的好坏直接影响新型龙门架金属3D打印设备打印零件的成型质量和效率。设备十字运动机构,如图2所示 。

图2 十字运动机构组成
2 有限元模型建立
2.1 十字运动模组连接支架三维模型
运用Solidworks对十字运动模组的连接支架进行三维数模创建,支架的外形轮廓尺寸为长260 mm,宽260 mm,高280 mm,厚度20 mm。三维数模如图3所示。通过设计经验,出于减轻支架的重量和节约材料的目的,提出了另一种优化方案,即:在支架安装接触面打孔(180×120 mm,倒角10 mm)。支架材料为不锈钢材料,其机械性能指标,如表1所示。

表1 材料机械性能指标
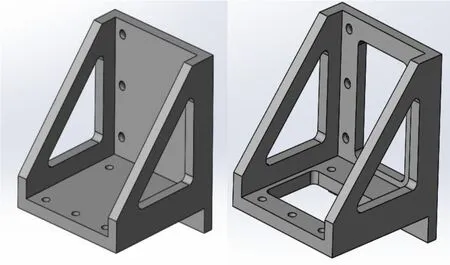
图3 支架优化前(左)后(右)示意图
2.2 网格划分
通常为了保证有限元计算结果的准确性,需要确保划分网格的质量,网格平均单元质量(Element Quality)保持在 0.7639>0.6,偏斜率(Skewness)为0.3369,其在0.25~0.5范围内,此时网格质量较好。使用ANSYS Workbench有限元软件自动生成网格,如图4所示。支架优化前后网格与节点数量,如表2所示。

表2 支架优化前后网格与节点数量
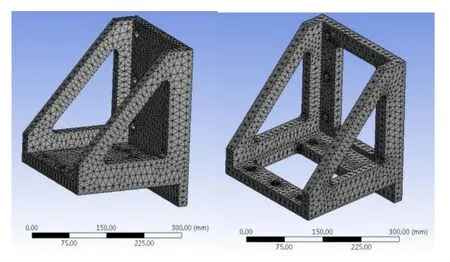
图4 支架优化前(左)后(右)网格划分
2.3 边界条件与载荷
十字运动机构的连接支架其边界条件和载荷如下两点所示。
(1)支架底座固定在Y方向模组上,受自身重力的作用;
(2)支架侧面与(Z)方向运动模组通过螺栓连接,且(Z)方向运动模组上安装有金属打印喷头模组。因此,支架侧面主要受到(Z)方向运动模组和金属打印喷头模组的重力作用。通过测量得到(Z)方向运动模组与金属打印喷头模组的总重量为60 kg,重力系数取9.8 N/kg。
3 支架结构静力学分析与优化
基于ANSYS Workbench静力学分析模块,对十字运动连接支架进行结构静力学分析,结果如图5和图6所示。其优化前后,最大变形量与最大应力,如表3所示。

图5 十字运动支架优化前(上)后(下)变形云图

图6 十字运动支架优化前(上)后(下)应力云图

表3 支架优化前后最大变形量与应力
新型3D金属打印设备的打印精度为0.02mm。静力学分析结果表明,支架优化前后的最大变形量为 0.002mm<0.02mm(远小于打印精度),且最大应力25.239 MPa远小于材料的屈服应力(304MPa)。因此两种方案均符合设计的强度要求。但从减轻重量和节约材料方面来考虑,应选用优化后的支架方案,优化后的支架减重35%。
4 支架模态分析与结果
4.1 模态分析理论基础
由有限元模态分析理论可知,模态分析就是一种计算结构振动特性的数值技术,结构振动特性包括了固有频率和振型[7]。
而无阻尼模态的分析是经典特征值求解问题,其动力学问题的本构方程为:

机械结构的自由振动一般为简谐振动,即振动位移为正弦函数:

将式(2)代入式(1)式中,得到:


4.2 预应力模态计算
根据电机的选型参数可知,伺服电机的转速为2000rpm,由此,可以求得伺服电机对机架的外界激励频率为33.33Hz。运用ANSYS Workbench对十字运动连接支架进行预应力模态分析,采用ANSYS中自带的Block Lanczos计算方法,求解4.1中的特征值。计算出十字运动连接支架的前6阶模态,得到支架前6阶振型云图和所对应的固有频率,如图7所示。



图7 十字运动的支架6阶模态振型图
4.3 结果与分析
通过上述预应力模态计算,得到支架的前6阶振型及固有频率的数值,各阶振型描述和相关参数,如表4所示。
模态分析的结果表明:十字运动的连接支架在第6阶固有频率共振时,其振型产生的变形量最大,最大变形量为26.352mm,对应的频率为1498.9Hz,由上表可知,十字运动连接支架的一阶最小固有频率469.17 Hz >33.33 Hz(外部激励频率),即设备正常工作时,外界激励频率与支架的固有频率不在同一范围内,十字运动连接支架不会产生共振现象,支架的设计符合设计要求。
5 结语
(1)设计了一台新型龙门架式3D金属粉末打印设备,设备通过龙门式三坐标工作台可实现准确打印工作;
(2)运用ANSYS Workbench中的静力学分析模块,对设备十字运动机构中的支架进行优化设计,支架减重35%;
(3)对模态分析进行结果分析,结果表明优化后的支架符合设计要求,通过这种设计方式,为此类支架的设计提供理论依据。
猜你喜欢
文史春秋(2022年4期)2022-06-16 07:12:52
数学大王·趣味逻辑(2021年3期)2021-03-10 11:21:26
电子制作(2019年12期)2019-07-16 08:45:20
汽车观察(2018年12期)2018-12-26 01:05:24
电子制作(2018年8期)2018-06-26 06:43:10
数学大世界(2018年1期)2018-04-12 05:39:05
电子测试(2017年11期)2017-12-15 08:57:38
湖北经济学院学报·人文社科版(2015年8期)2015-12-29 05:53:07
上海电机学院学报(2015年4期)2015-02-28 14:30:00
计算物理(2014年2期)2014-03-11 17:01:39
