
典型路面的车辆悬架预瞄控制系统研究
2021-06-05 07:02:52秦东晨黄一鸣朱玉刚王婷婷
机械设计与制造 2021年5期
秦东晨,黄一鸣,朱玉刚,王婷婷
(1.郑州大学机械工程学院,河南 郑州 450001;2.中国汽车技术研究中心有限公司,天津300300)
1 引言
悬架是车辆的重要组成部分,它对车辆的驾驶舒适性和安全稳定性均有较大的影响。而根据不同路面激励及时调整悬架状态可以使悬架起到更有效的减振效果,因此相关学者在车辆悬架控制系统领域做出来很多研究并且成果显著[1-3]。
Mark R.Jolly 和Lane R.Miller 应用了相关控制方法,将从半主动悬架阻尼器上测得的位移和速度作为反馈信号,以此对阻尼器加以控制。文献[4]提出了一种基于轴间预瞄的模糊控制,相比传统模糊控制能更有效降低车辆振动。这些研究结果已经在不同条件下得到了验证,但是均存在不可避免的缺陷,即系统具有延迟效应。悬架需要首先感知路面激励,再由控制器驱动执行元件来衰减路面激励。车辆在道路行驶过程中通过典型路面(如减速带或井盖等)时,延迟问题会严重影响到悬架的减振效果。当车辆通过一些瞬时典型路面时,执行机构开始反应时,车轮已经越过路面的起伏处。在这类情况下,悬架无法完全发挥其减振性能。
根据上述问题,以机器视觉为基础,将完全预瞄方法应用于悬架控制系统的研究中,提出了一种针对典型工况的悬架预瞄控制系统。首先基于OpenCV 对前方路面信息进行检测,通过对路面特征的识别、跟踪和测距完成预瞄操作,并融合车辆实时信息及时调整悬架状态。通过预瞄试验验证新型悬架预瞄方法的准确性和稳定性,并采用实车试验验证新型悬架预瞄控制系统的可行性和有效性。
2 系统建模与结构
2.1 模型建模
为了便于对悬架控制系统响应时间延迟问题的研究,建立1/4 车悬架模型,如图1 所示。
如图1 所示,悬架模型的动力学方程:
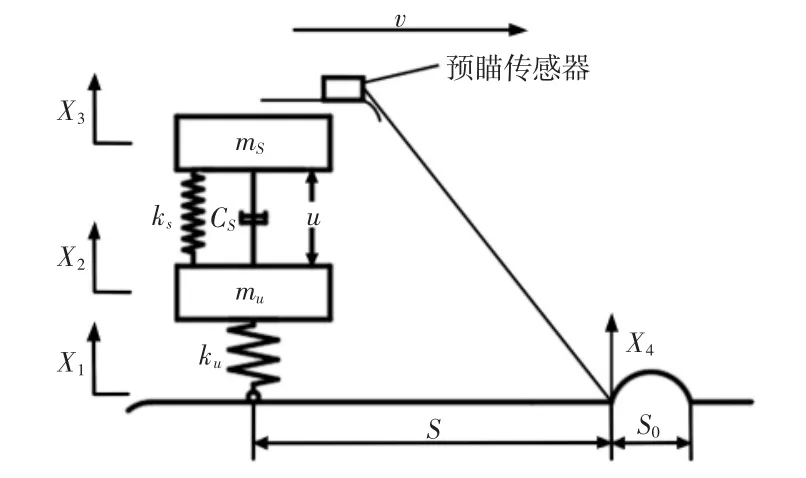
图1 1/4 车悬架模型Fig.1 1/4 Vehicle Suspension Model

式中:Xi、X˙i、X¨i—垂直位移、垂直速度、垂直加速度,m、m/s、m/s2;ms、mu—模型簧载和非簧载质量,kg;cs—悬架系统阻尼系数,N/(m/s);ks、ku—悬架系统和轮胎刚度,N/m;u—悬架主动控制力,N。由此看出,实时调整悬架状态可以有效衰减路面激励。
车辆的前进速度v 实时可测量。定义典型路面的纵向长度为S0,在不考虑轮胎弹性的情况下,车辆通过目标典型路面的时间t0可表示为:

式中:θ—车辆通过典型路面时速度方向与水平方向的夹角,该夹角大小取决于典型路面的不平度。
定义X4为预瞄系统感知的路面信息;X5为预瞄前悬架控制系统感知的路面信息。由于通过减速带、井盖等典型路面时在短时间内会产生明显的瞬时激励,故将预瞄前后系统感知的时滞量计算在内,分别表示ε1,ε2则:

式中:d=S/v,S—预瞄距离。联立式(2)、式(3),当t0>ε2时,悬架响应会产生一定程度的延迟;当t0<ε2时,悬架不能发挥性能优势。采取完全预瞄后,当d>ε1-ε2时,理论上可降低悬架控制系统的延迟效应;当d>ε1时,理论上可从根本上解决延迟问题。其中d 的大小取决于预瞄传感器的性能,而ε1的大小取决于预瞄方法。因而,在考虑视觉传感器成本的前提下,预瞄方法的优劣直接决定了悬架系统的控制效果。
2.2 系统结构
悬架预瞄控制系统基于预瞄跟随理论[5],包括信息感知、决策调整、操作控制和校正控制四个部分。感知系统和决策系统组成了悬架控制系统的预瞄器,即包含了未来的路面信息,如图2所示。完全预瞄通过车前视觉传感器采集路面信息,OpenCV 作为计算机视觉开源库可以对采集的路面图像进行处理。决策调整部分是时刻根据感知部分预瞄的前方路面信息和汽车的状态,分析并决策出悬架通过该路段的理想模式。操作系统相当于跟随器,它根据前面决策出的理想悬架模式产生实际的操作动作。校正系统为自适应系统,提高了预瞄控制对悬架操控的准确度。

图2 系统结构Fig.2 System Structure
3 预瞄过程
基于OpenCV 的完全预瞄分为对前方路面特征的识别、跟踪和测距三个过程,这里选取的典型路面特征为减速带和井盖。其中识别路面特征的方法以机器学习为基础,故可以根据实际情况识别更多不同路面特征,提升路面预瞄的多样性。
3.1 基于Gentle Adaboost 的路面特征识别
采用Gentle Adaboost 算法完成对典型路面的识别。首先根据不同的路面特征分别训练得到级联分类器,然后通过程序加载分类器实现识别过程。这种方法的检测准确率高、检测速度快,且在道路车辆检测[6]和行人检测[7]等方面的可行性已经得到验证。
以Gentle Adaboost 级联分类器可以训练不同典型路面特征的分类器。通过试验证明,当几种路面特征的差异性较大时,分别采用单独的分类器训练的效果要明显优于只采用一个分类器训练出来的效果。通过pyCharm5.0 开发平台上加载分类器并使用python 编程语言完成对路面的识别,步骤如下:
(1)预瞄区域的划分。根据车辆结构参数和摄像头具体安装位置对预瞄图像设置感兴趣区域(ROI),即车轮将通过的路面范围。同时对图像去噪和灰度处理,提高运行效率。
(2)加载不同路面特征的分类器。分类器以上述方法得到,通过casecade.detectMultiScale()函数识别预瞄图像。
(3)利用list.append()函数将不同路面特征的检测效果叠加,并通过cv.rectangle()函数框选出来,完成路面识别。
3.2 基于Kalman 滤波的路面特征跟踪
Kalman 滤波器在计算机视觉领域应用广泛,尤其在实时跟踪的应用中。这种方法提供了一种反馈机制,包括了对目标检测的预测和测量两个过程。预测过程对实时位置进行估计,而测量过程修正了预测的估计,并相应地更新检测目标的位置。该算法是一个迭代循环的过程,且适用于实时数据。只对直线段道路的特征进行检测,故将车辆的运动状态简化为匀速直线运动,步骤如下:
(1)预测过程。通过KalmanPredict()函数完成,预测由上述操作框选出的路面特征被连续识别出后下一帧可能出现的位置。
(2)测量过程。通过KalmanCorrect()函数完成过程,修正上一步的预测结果,并更新当前帧框选特征的位置。
3.3 基于视觉定位模型的路面特征测距
预瞄过程中对典型路面的测距是指通过建立视觉定位模型[8]测量轮胎到典型路面的距离。由于路面的特征已经通过前述步骤完成识别和跟踪,并且在图像中被框选出来。因此,这里只需要对框选目标进行纵向测距即可获取预瞄距离。建立视觉定位模型,如图3 所示。

图3 视觉定位模型Fig.3 Vision Position Determination Model
图中:XROYR—路面坐标系,以视觉传感器所在位置在路面上的垂向投影为原点OR,以传感器朝向ORYR为纵轴;uO″v—帧存像坐标系,以图像平面的左上角为原点,以像素数为长度度量单位,故u、v 在坐标系上的最大值分别为图像在x、y 方向最大像素数;xO′y—像平面坐标系,原点在图像平面上,其像素坐标为(u0,v0)。xO′y 与uO″v 的坐标变换关系为:

式中:dx、dy—摄像机参数,分别表示相邻感光点x 方向和y 方向的距离。dv—焦距f 和帧存像平面中的一个像素对应于像平面在y 轴方向的物理尺寸。α、h—摄像机安装参数,分别代表安装倾斜角和高度,P′(0,y)—P 投影在像平面的坐标,其中P 点—前述步骤中框选特征的底线中点。基于几何关系计算得到传感器透镜到P 点的距离D:

测量得到视觉传感器到车体前端的距离为d1,前轴中心到车体前段的距离为d2,则预瞄距离S 为:

4 系统控制流程
根据上述的系统结构设计悬架控制流程,并在电磁阀式阻尼连续可调减振器上对悬架预瞄控制方法进行验证。该减振器是通过电磁阀的电流控制调整阻尼,以此调整悬架状态。系统控制流程,如图4 所示。

图4 系统流程图Fig.4 System Flowchart
控制系统包括路面信息和车身信息两个采集系统,视觉传感器采用的是CCD 摄像头,将前方路面信息传输到上位机。PC机作为上位机负责处理采集的路面信息并使用CAN 通信提取的实时车辆数据,根据上述预瞄算法检测路面特征,通过编程器与下位机ECU 通信。下位机根据多信息融合的控制策略在悬架通过典型路面之前对悬架进行理想化调节。
5 试验
5.1 预瞄试验
预瞄试验的硬件平台为Intel(R)Core(TM)i5-6300HQ CPU@2.30GHz,8GB RAM 的计算机,软件环境为PyCharm5.0 开发平台下OprnCV3.4.0。
5.1.1 预瞄效果
选择在白天正常光照条件下的城市道路上进行预瞄检测试验,效果,如图5 所示。其中图5(a)为检测出出现在车辆前方的减速带特征并框选出来,图5(b)中检测出路面的井盖特征。两个特征均为上述级联分级器训练识别的典型路面特征。

图5 预瞄效果图Fig.5 Preview Rendering
5.1.2 检测试验
从采集的预瞄视频中截取1 000 帧图像数据作为检测样本。以减速带和井盖作为目标特征,将对目标特征的检测率DR 和误检率MDR 作为评价典型路面预瞄方法的标准。

式中:TD—被检测出的目标特征数量;FD—未被检测出的目标特征数量;MD—被误检的目标特征数量。
检测结果,如表1 所示。表中:GT—样本中出现的特征总数;GDR、GMR—综合检测率和综合误检率;ε—检测的平均处理时间。

表1 预瞄检测结果Tab.1 Results of Preview Detection
经试验证明,该预瞄方法对典型路面特征的检测准确率高、检测速度快,并且可以在不影响检测准确率的前提下同时检测不同的路面特征。
5.2 实车试验
试验路段为直线段,以法式横向带作为试验工况。在车速为60km/h 时悬架控制系统预瞄前和预瞄后的车身性能比较,如图6所示。在不同车速下预瞄前后悬架系统实车道路试验结果,即频域范围内的峰值和有效值的比较,如表2 所示。

图6 预瞄前/后的悬架系统车身性能比较(60km/h)Fig.6 Comparison of Vehicle Performance of Suspension System before and after Preview

表2 预瞄前/后的悬架系统实车道路试验结果Tab.2 Results of Road Test for Suspension System before and after Preview
6 结论
在车辆行驶在典型路面的过程中,采用上述预瞄方法后驾驶员座椅和悬架簧上垂直加速度均有所降低,故在一定程度上提高了车辆的乘坐舒适性和操纵稳定性。在不同车速下的悬架性能均有提升,车速越高提升的效果越明显。这主要是由于车速的改变影响了典型路面的通过时间与悬架控制处理时间之间的差距。因此,预瞄后的悬架控制系统能够在特定情况下有效地解决悬架控制系统的响应时间滞后问题,同时也验证了基于机器视觉的预瞄方法的可行性和有效性。
猜你喜欢
小学生作文(低年级适用)(2022年10期)2022-10-31 01:51:28
中学生数理化·七年级数学人教版(2022年11期)2022-02-14 07:13:52
现代临床医学(2021年1期)2021-01-26 00:56:32
电子测试(2018年1期)2018-04-18 11:52:35
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
北京汽车(2016年6期)2016-10-13 17:07:50
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
电测与仪表(2014年15期)2014-04-04 12:05:20
汽车维护与修理(2014年10期)2014-02-28 12:15:00
