基于LSTM网络辅助无迹粒子滤波的列车定位方法研究
2021-06-04 08:51陈永刚白邓宇熊文祥
云南大学学报(自然科学版) 2021年3期
陈永刚,王 妍,白邓宇,熊文祥
(兰州交通大学 自动化与电气工程学院,甘肃 兰州730070)
因铁路运营速度的提高,列车运行控制系统对列车定位技术提出了更高的要求. 基于卫星的列车定位是未来列车定位技术的发展方向,已成为当今研究的热点[1].目前,全球定位系统(Global Positioning System,GPS)与捷联惯性导航系统((Strapdown Intertial Navigation System,SINS)因其性能互补,能够满足高精度定位要求,因此将其组合引入于列车定位领域以改进传统定位方式的不足[2].
对于非线性列车组合定位系统,实现组合的关键是信息的有效融合.文献[3]采用自适应卡尔曼滤波器不断更新测量噪声,降低环境噪声从而提高了导航定位精度;文献[4]将平方根容积卡尔曼滤波和交互多模型结合解决了噪声的不确定性;文献[5]将抗差估计理论的等价权原理应用于标准无迹卡尔曼滤波,解决了非线性和鲁棒性问题;文献[6]通过H∞范数改进容积卡尔曼滤波中的方差更新和分解,以此解决了鲁棒性问题;文献[7]利用奇异值分解无迹卡尔曼滤波的方法解决了粒子退化现象.以上文献讨论的重点均是以提高卫星信号有效时的定位精度为目的,没有考虑卫星信号缺失时定位精度下降的问题.然而在隧道、山区等环境下,卫星信号会发生全部或部分缺失的现象,此时的定位系统虽然可以通过SINS实现连续定位,但是输出的结果会随着卫星信号缺失时间的增长而不准确.
为了实现不间断导航定位且保证一定的定位精度,智能技术结合卡尔曼滤波技术是国内外学者常用的一种方法.本文借鉴该思想,采用可以解决非线性系统信息融合的无迹粒子滤波(Unscented Particle Filter,UPF)对GPS信号有效时信息进行处理;当GPS信号缺失时,滤波算法的输入只有SINS信息,为了确保滤波算法输入的准确性,因此本文选择具有记忆特性的基于长短时记忆(Long Short Term Memory,LSTM)网络代替GPS信号,并用LSTM和UPF构建神经网络监督控制模型,实现卫星信号缺失下的列车定位.
1 GPS/SINS列车定位模型
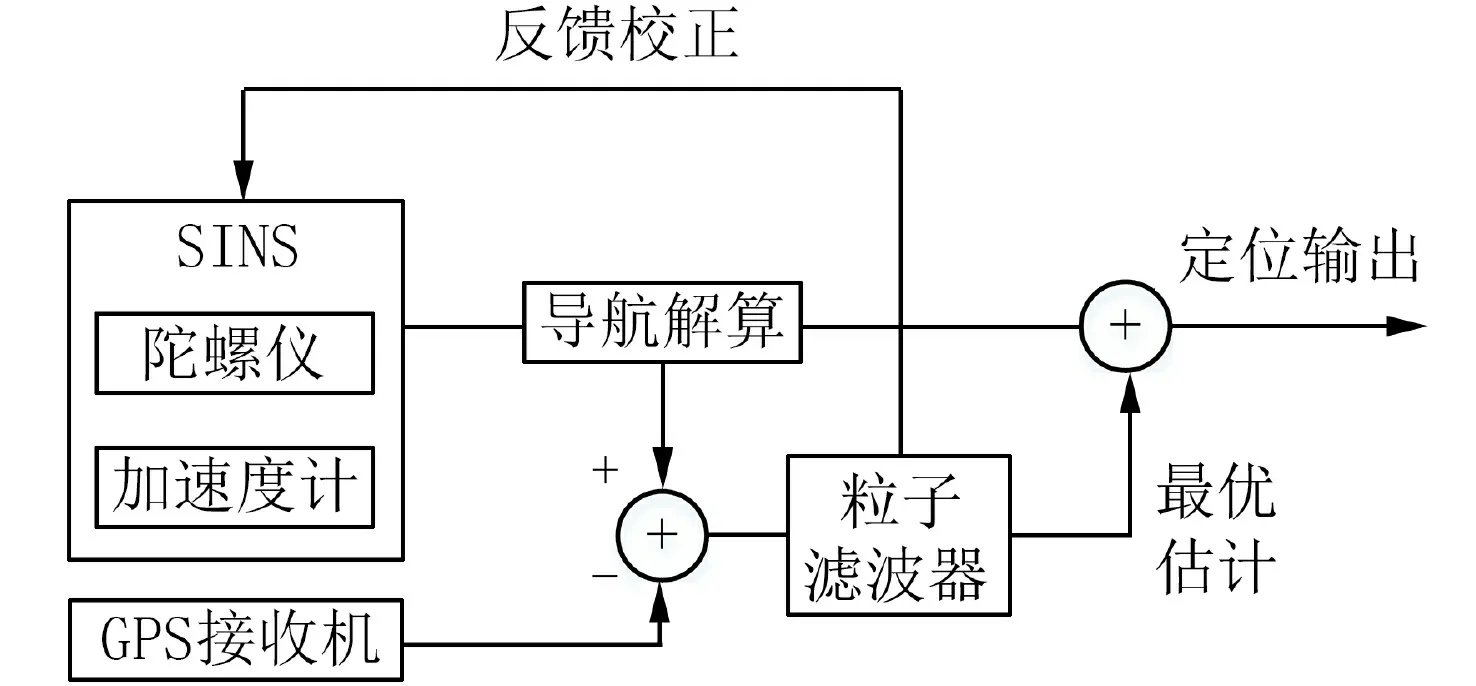
图1 系统工作原理图Fig.1 Thediagram of system working principle
定位系统工作原理如图1.将经过导航软件解算后得到SINS信息和GPS信息,二者进行作差后,作为量测量输入给粒子滤波器,通过粒子滤波器对两者的误差进行最优估计后,反馈给SINS对定位误差进行修正[5].
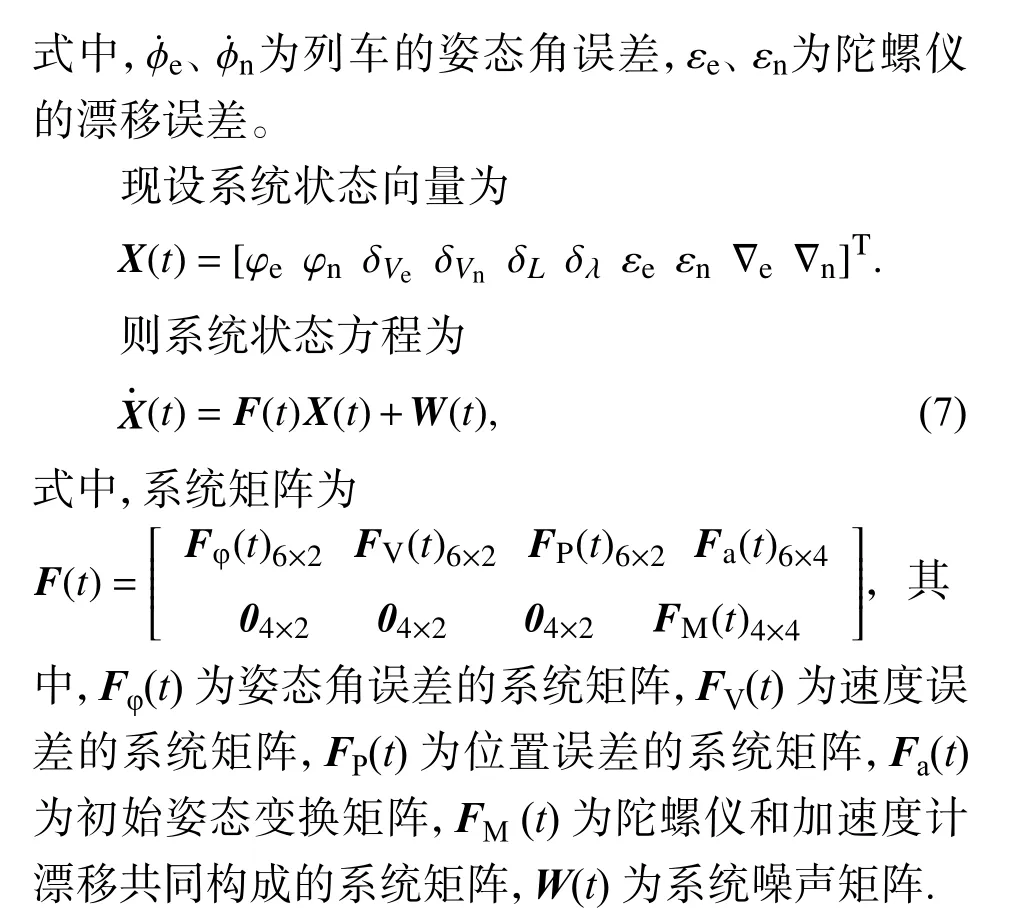
1.1 系统状态方程将列车运动过程视为平面运动,用速度、位置及姿态误差构建系统的状态量,根据惯性导航定位原理,建立SINS系统的误差模型[8-10].
(1)速度误差 速度误差方程为

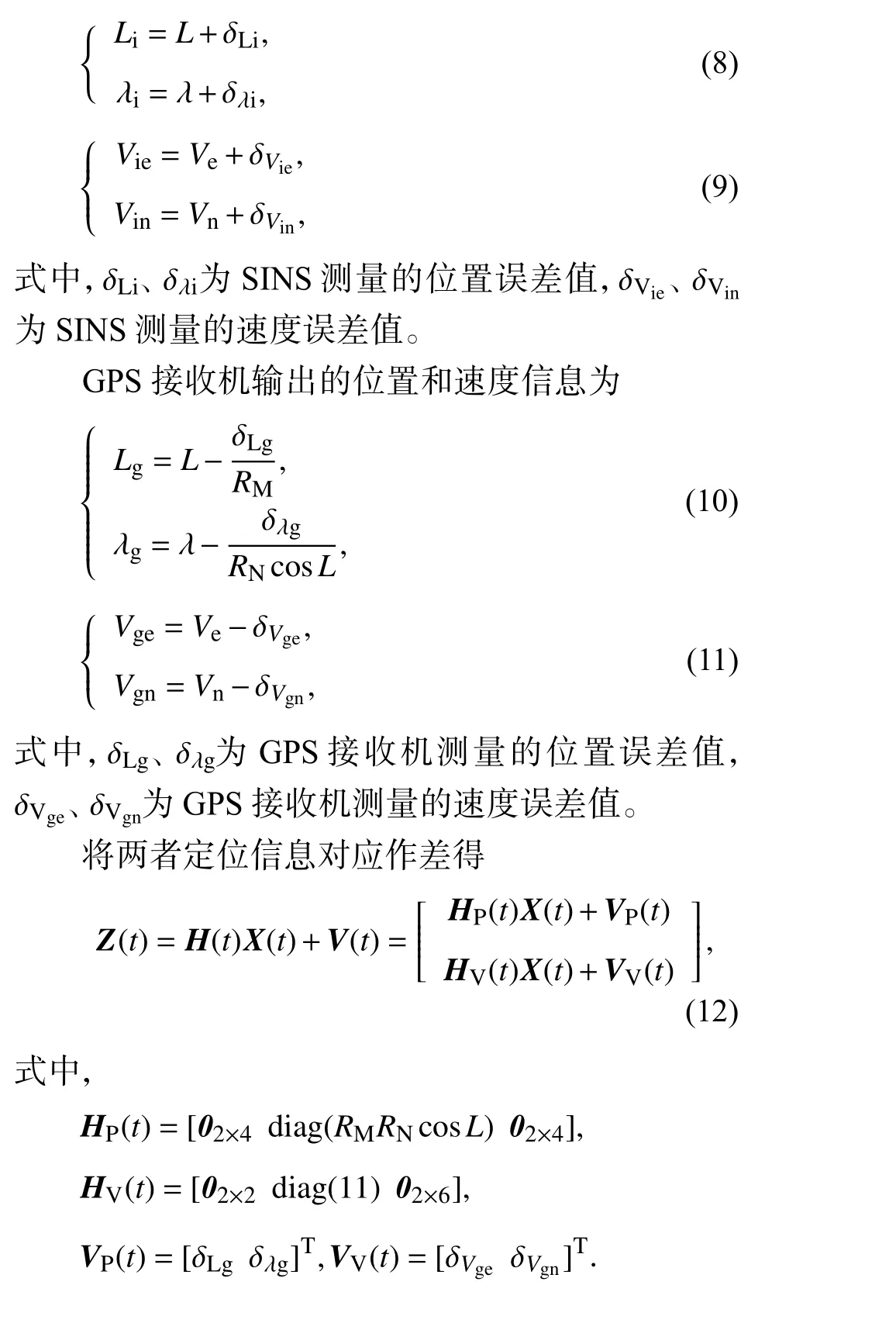
1.2 系统测量方程选取列车速度和位置信息作为量测对象,利用GPS和SINS的速度和位置误差构建系统的量测量.
SINS输出的位置和速度信息为[8-10]
2 算法介绍
2.1 无迹粒子滤波(UPF)粒子滤波(Particle Filter,PF)算法针对非线性列车定位系统,它可以不断更新一群粒子及权值来逼近后验密度函数,以此解决列车定位[9].
现将后验密度函数表示为
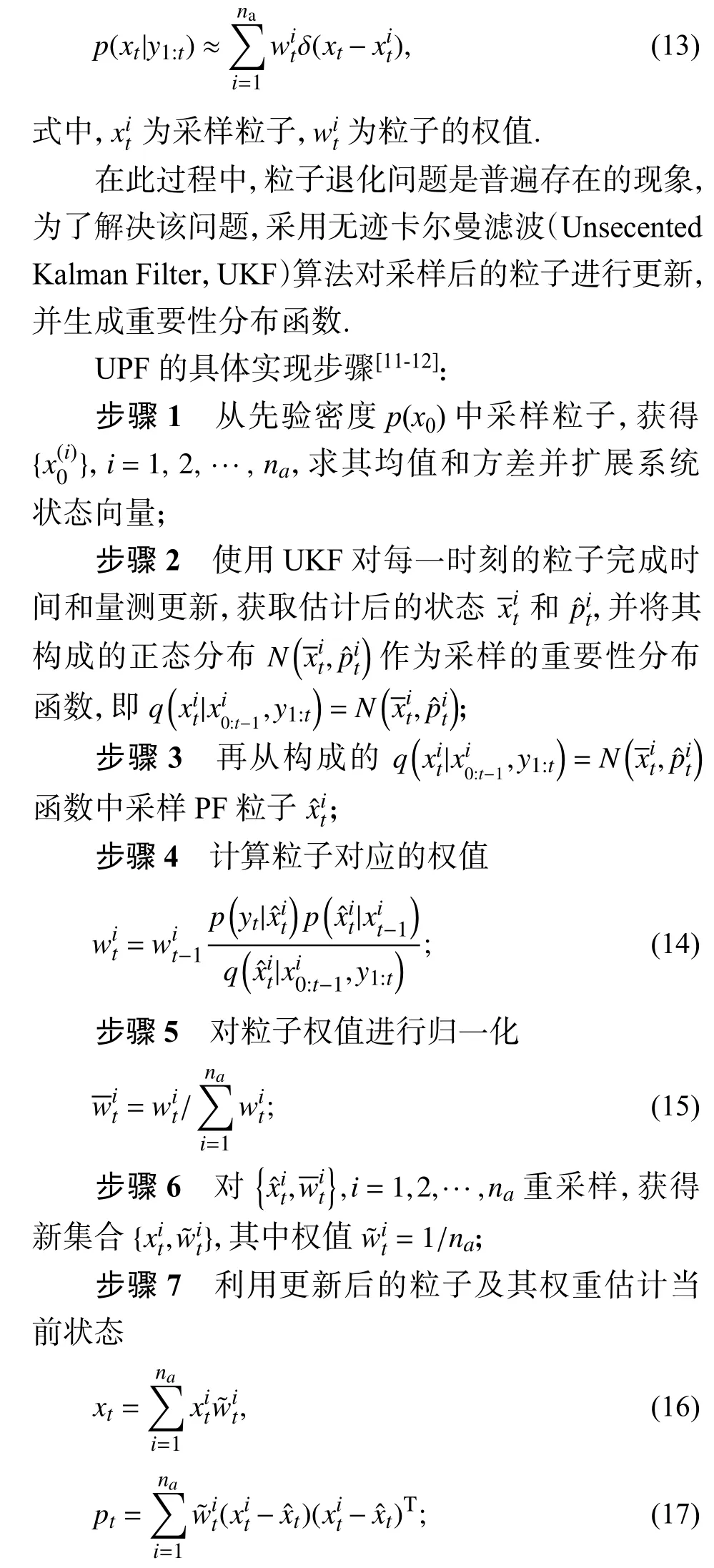
步骤8重复步骤2~7,直到t=T(T为测量值的数量).
2.2 长短时记忆网络(LSTM)LSTM网络是建立在循环神经网络基础上的一种深度神经网络,通过引入特有的遗忘门、输入门和输出门获得更持久的记忆能力[13-17].GPS信号有效时,使用LSTM网络学习位置速度信息之间的逻辑关系;GPS信号缺失时,便可以为UPF提供更准确的输入信息.LSTM网络隐藏层运算图如图2所示.

图2 LSTM隐藏层运算图Fig.2 The operation diagram of LSTM hidden layer
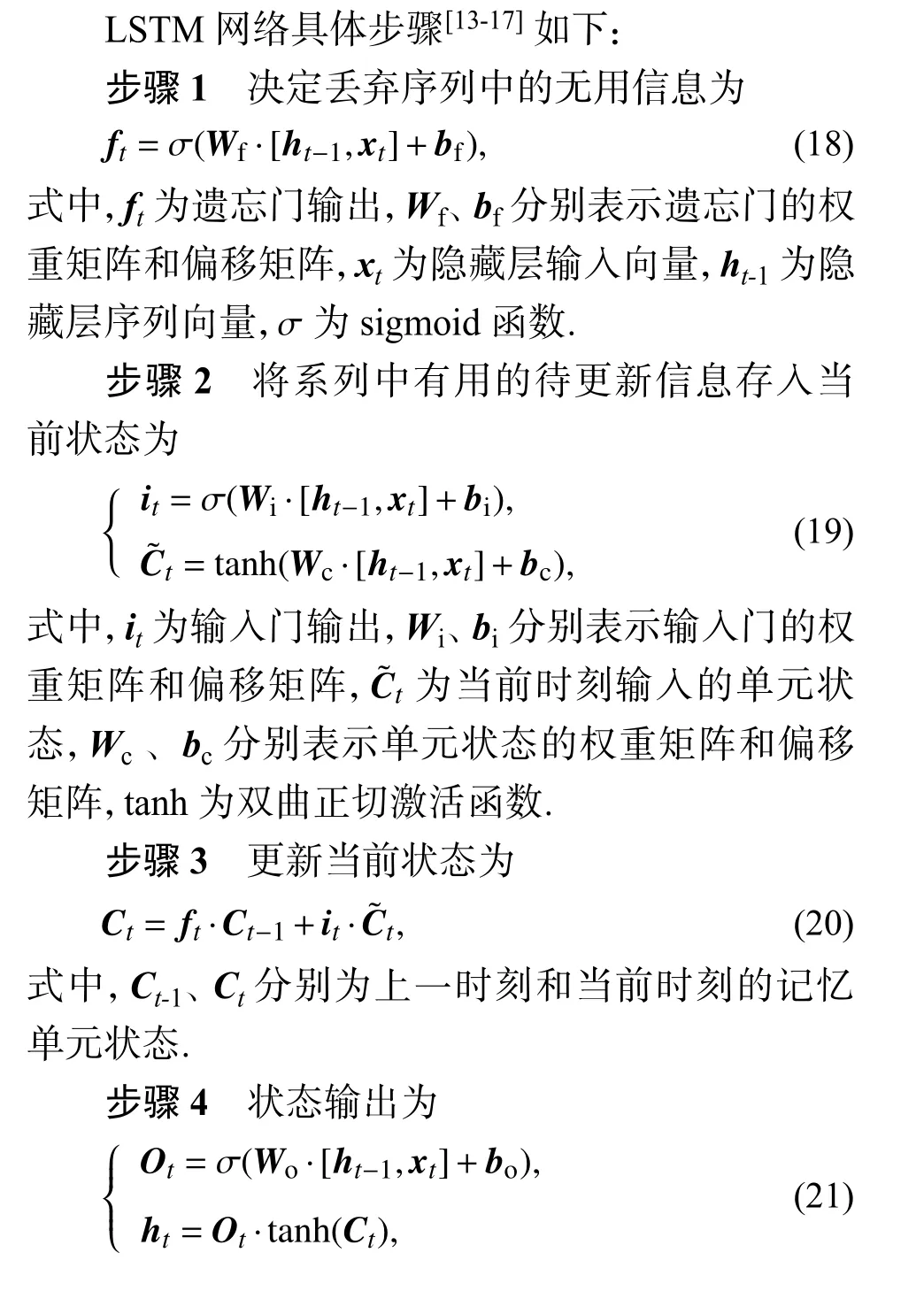
式中,O t为输出门输出,Wo、bo为输出门的权重矩阵和偏移矩阵.
3 LSTM网络辅助无迹粒子滤波的定位模型
若GPS信号有效,采用UPF1对GPS和SINS信息融合,最终得到的结果不仅反馈给SINS用于修正误差,而且作为LSTM1的输入对其实时在线训练.若GPS信号缺失,利用在GPS信号正常时构建的LSTM1与SINS信息一同作为UPF2的输入,实现对GPS信号缺失部分的初期启动控制;LSTM2综合系统当前误差,历史误差以及历史控制量,利用UPF2滤波后的信息进行学习;系统最后的输出结果由UPF2和LSTM2的输出结果共同控制,但随着LSTM2不断逼近定位模型,UPF2的输出逐渐趋于0,LSTM2逐步替换UPF2决定输出结果. LSTM网络辅助无迹粒子滤波具体定位过程如图3所示.

图3 LSTM辅助UPF定位过程Fig.3 Positioning process of LSTM aided UPF
4 仿真实验及结果分析
令列车的初始位置为E108°56′、N34°22′,初速度为0 m/s.仿真时间为700 s,设置前500 s GPS信号有效,后200 s GPS信号缺失,采样周期为1 s,仿真时间内列车匀速行驶. 相关仿真参数设置为:GPS位置及速度误差的均方误差分别为10 m和1 m/s,陀螺仪和加速度计的一阶高斯Markov相关时间为300 s,陀螺漂移0.1°/h,加速度计漂移为10-4g,g≈9.8 m/s2,陀螺仪一阶Markov噪声均方差0.1°/h,加速度计一阶Markov噪声均方差为10-3g.
本文实验过程一共分为3个部分进行研究,分别为前500 s卫星信号有效时采用UPF算法进行列车定位、后200 s卫星信号缺失时没有算法辅助单独使用SINS进行列车定位以及后200 s卫星信号缺失时采用LSTM辅助UPF进行列车定位.
在GPS信号正常时,将传统使用PF算法进行列车定位的结果与本文采用UPF算法的结果进行比较,结果如图4,并制表进行对比,如表1.经过对比图4和表1,可以发现,PF输出的列车位置误差在±5.1 m,速度误差在±0.4 m/s,UPF输出的列车位置误差在±4.7 m,速度误差在±0.3 m/s,两者的定位误差均满足基于卫星的列车定位要求,但是本文使用的UPF算法的均值误差和均方根误差小于PF算法的误差,选择使用UPF的结果训练LSTM网络将会更加准确,为GPS信号缺失时的列车定位做好准备.
当GPS信号缺失且没有算法辅助的情况下,单纯使用UPF算法进行速度位置估计,得到的结果如图5.由图5可知,GPS信号缺失后,列车位置误差在±25 m,速度误差在±5 m/s,与GPS信号正常时的UPF输出的列车位置误差相比,列车位置速度逐渐发散.这说明了在GPS信号缺失时,有必要对UPF算法进行算法辅助,以此满足列车定位的精度要求.
在卫星信号缺失时,将使用径向基神经网络(Radial Basis Function Neural Network,RBF)辅 助UPF的定位结果与本文采用的LSTM算法辅助UPF的结果进行比较,结果如图6,并制表进行对比,如表2.经过对比图6和表2,可以发现,与GPS信号缺失下未使用神经网络辅助的结果对比,有神经网络算法辅助的定位误差明显减小;使用RBF算法辅助UPF的列车位置误差在±3 m,速度误差在±0.9 m/s,而LSTM算法辅助UPF的列车位置误差在±2.5 m,速度误差在±0.7 m/s,LSTM算法辅助UPF的列车定位误差小于RBF算法辅助UPF的误差,这不仅体现了LSTM算法的优势,也体现了使用LSTM辅助UPF算法进行列车定位的优势.

图4 信号正常时不同算法的定位误差对比Fig.4 Comparison of positioning errorsof different algorithmswhen GPSsignal isavailable

表1 PF和UPF输出的定位误差对比Tab.1 Comparison of positioning error output by PFand UPF
最后,将卫星信号正常时UPF的结果,卫星信号缺失时没有算法辅助的结果以及卫星信号缺失后有LSTM辅助的结果进行对比,结果汇总为表格,如表3、4.由表3、4可以看出:
(1)GPS信号缺失时的位置误差与GPS信号正常时的位置误差相比逐渐发散,位置从±4.7 m发散到±25 m,速度从±0.3 m/s发散到±5 m/s,证明了需要对卫星信号缺失时的UPF进行算法辅助,以提高卫星信号缺失时的列车定位精度;
(2)GPS信号缺失时有LSTM算法辅助UPF的定位误差比没有算法辅助UPF的定位误差明显减小,证明了LSTM算法辅助UPF的优越性;
(3)GPS信号缺失时有LSTM算法辅助UPF的定位误差近似达到GPS信号正常时的定位误差,验证了本文算法的可行性.
5 结语

图5 GPS信号缺失且没有算法辅助下的定位误差Fig.5 Positioning error during GPSsignal is inavailable and no algorithm aided
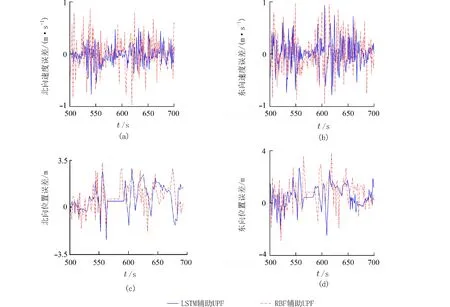
图6 GPS信号缺失时不同算法的定位误差对比Fig.6 Comparison of positioning errorsof different algorithms when GPSsignal isinavailable

表2 LSTM 辅助UPF和RBF辅助UPF对比结果Tab.2 Comparison results of LSTM aided UPFand RBFaided UPF
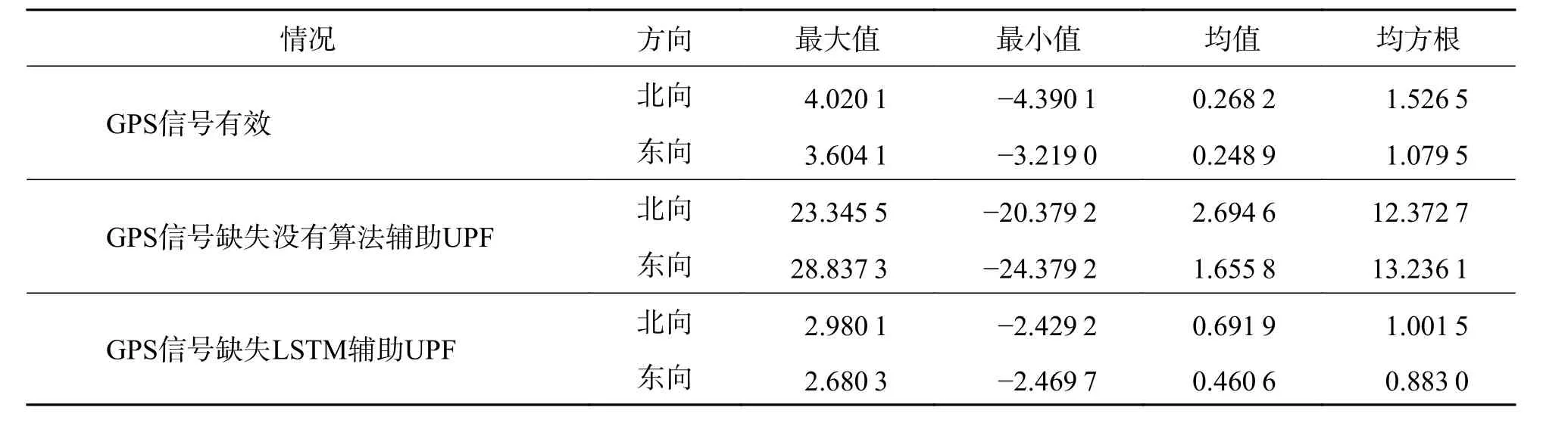
表3 不同情况下位置误差对比Tab.3 Position error comparison in different situations m

表4 不同情况下速度误差对比Tab.4 Speed error comparison in different situations m·s-1
研究GPS卫星信号缺失时的定位方法对于提高定位系统整体的定位精度很有必要,本文以基于GPS/SINS列车定位系统为研究基础,针对GPS信号容易受环境因素影响导致精度下降的情况,提出使用LSTM神经网络辅助UPF的列车定位方法.首先分析了GPS信号有效时利用UPF算法进行滤波估计的结果,确保利用该信息训练LSTM1的准确性;然后分析了GPS信号缺失时在没有算法辅助定位情况下的定位误差以及GPS信号缺失后利用LSTM网络辅助UPF算法进行列车定位的定位误差.通过对比不同情况下的定位误差,验证了LSTM网络辅助UPF算法进行列车定位的优越性.考虑到列车定位本身对于高精度和实时性的要求,下一步研究应着重对于算法进行改进,以此实现对两者的兼顾.
猜你喜欢
河北理科教学研究(2021年3期)2022-01-18
发明与创新(2021年39期)2021-11-05
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
小学生学习指导(低年级)(2019年6期)2019-07-22
材料科学与工程学报(2016年1期)2017-01-15
汽车文摘(2015年11期)2015-12-02
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
中国火炬(2014年11期)2014-07-25