智能网联汽车安全综述
2021-06-04 06:55:44钟永超杨浩男杨毅宇王文杰徐紫枫
信息安全研究 2021年6期
钟永超 杨 波 杨浩男 杨毅宇 王文杰 徐紫枫
1(海南大学计算机与网络空间安全学院 海口 570208) 2(中国科学院大学国家计算机网络入侵防范中心 北京 101408)
智能网联汽车(intelligent and connected vehicle, ICV)是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与车、路、人、云等之间的智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现安全、高效、舒适、节能行驶,并最终实现替代人来操作的新一代汽车[1].麦肯锡从目前世界智能网联汽车发展速度预测,在2025年全球智能网联汽车生产经济可以达到1.9万亿美元[2].从智能化角度来看,全球智能化相关的零配件市场是一个价值1万亿美元的市场,预计2030年,全球自动驾驶市场将达到420亿美元,全球汽车智能化的占比从原来的10%左右上升到60%[3].
然而,智能网联汽车为客户带来便利的同时,也暴露出许多信息安全问题.据Upstream报告数据显示,公开报道的针对智能网联车网络安全攻击事件,由2018年的80起激增到2019年的155起[4].
1 智能汽车发展技术路线
目前ICV可以从3种技术路线来进行剖析,即“智能”“网联”“智能网联”[5].实现单车“智能”为目标的汽车就是AV(自主式汽车),“智能”即搭载先进的车载传感器、控制器、执行器等装置和车载系统模块,具备复杂环境感知、智能化决策与控制等功能,这是国外的优势技术路线;实现“网联”协同驾驶的汽车就是CV(网联式汽车),“网联”主要指信息互联共享能力,即通过通信与网络技术实现车内、车与环境间的信息交互,CV是基于车联网的进一步发展.
如文献[6]所述,ICV是AV与CV的融合发展技术路线,是未来实现无人驾驶的主要发展方向.智能网联汽车能充分利用2种技术的优势取长补短,从而更快进入无人驾驶阶段.
2 智能网联汽车架构
智能网联汽车拥有复杂的网络架构,也具有更多微型电子设备,从而大大增加了体系结构的复杂度.如图1所示[7],ICV整体架构可以分为:车载网络架构、基于车到其他设备的连接(vehicle-to-everything, V2X)的车载通信技术以及以通信服务提供商(telematics service provider, TSP)为核心的云端基础设施.
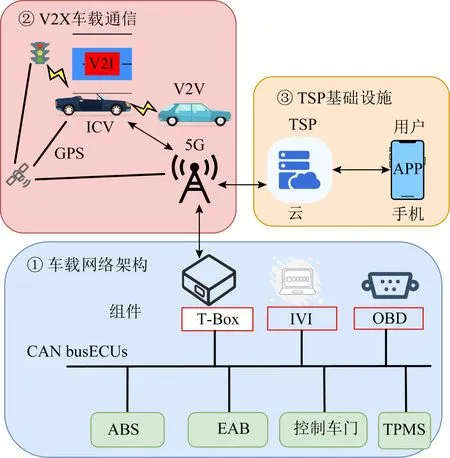
图1 ICV整体通信网络架构
2.1 车载网络架构
车载网络架构是汽车内部控制单元之间通信的载体,其包括了相应的协议规则和消息格式的定义,它把各种控制单元统一在一起,各个控制单元挂载到车载网络上,因此控制单元也称为电子控制单元(electronic control unit, ECU)网络节点.汽车车载网络是由相应的总线组成.目前在汽车内部最常见的总线是:控制器局域网络(controller area network, CAN)、MOST(media oriented system transport)、LIN(local interconnect network)、高速车载(flex ray)总线[8].
CAN是博世于1983年提出的.由于其安全性和实时性保证,它成为汽车行业使用的事实标准,各种应用层协议都建立在其上[9].
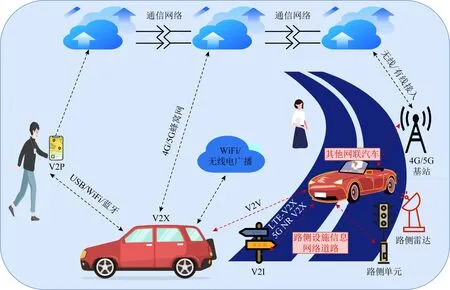
图2 V2X车载通信技术应用图景
CAN总线上的数据可以通过标准化的车载诊断OBD(on-board diagnostics)端口在本地访问[10].有2种OBD标准,即OBD-I和OBDII.OBD-I于1987年推出,但有许多缺陷,因此被1996年推出的OBD-II所取代[11].OBDII端口几乎可以在任何现代车辆中找到,CAV也不例外.
车载信息娱乐系统(in-vehicle infotainment, IVI)嵌入到多媒体触摸屏中,提供多种商用功能,如实时交通地图、智能手机应用远程控制等基本汽车功能.IVI的网络连接由远程控制单元(TCU)提供,IVI既可以通过TCU连接到外网,又可以通过TCU访问车载CAN总线.
ICV还可以通过车载通信模组T-Box和车外网络进行通信,传统的T-Box仅用来采集车内数据,新型T-Box已经将蓝牙(Bluetooth)、无线网络(WiFi)、通用串行总线(USB)、全球定位系统(GPS)和移动蜂窝网等组件整合起来[7].TCU是新型T-Box的核心部分,带有嵌入式SIM卡.TCU可以连接到互联网,发送/接收短信,以及拨打/接听电话.TCU通过异步收发传输器(UART)直接连接到多媒体面板中的IVI,可以直接访问汽车的主CAN总线,还可以和TSP云端通信.
2.2 V2X车载通信技术
开发V2X技术的目的是实现道路环境中遇到的所有实体之间的通信,包括车辆、通信基础设施、行人、自行车等[12].
如图2所示[10],在V2X网络中,为了与外部代理(如行人、其他车辆、路边交通基础设施和服务器(基于云或内部))通信,ICV使用车辆到车辆(V2V)、车辆到基础设施(V2I)以及车辆到行人(V2P)通信[13].在V2V通信中,车辆相互交换安全关键信息(如信息信标、道路和交通状况),称为基本安全信息(BSM);另一方面,在V2I通信中,车辆可以与附近的通信基础设施通信,以获得对路线规划、交通信息、操作数据的支持,并访问需要更多带宽和频繁访问互联网的娱乐服务.因此,传统的无线设计方法不能同时满足车载终端的异构和严格的服务质量要求.
3GPP C-V2X作为初始标准于2017年初完成,包括LTE-V2X(基于4G)和NR-V2X(基于5G)2种接入技术.旨在为危险情况提供可靠、可扩展和强大的无线通信,C-V2X是迈向5G的第1步[14].
2.3 TSP云端基础设施
TSP(telematics service provider),即汽车远程服务提供商.TSP在智能网联汽车外部,远程为用户提供强大的通信娱乐服务,进一步整合V2X通信技术,提高ICV的安全能力.
TSP主要由设备供应商、网络供应商和内容提供商组成.设备供应商为ICV提供服务器等网络设备,这些硬件设施能够使得TSP更好地发挥作用;网络供应商为ICV提供网络服务,汽车可以通过电信、联通或者移动运营商接入互联网,连接云端,以便将一些重要数据存放在数据中心;内容提供商主要提供一些软件层面上的服务.用户可以使用蓝牙和WiFi近距离接入车载终端,便于和车机也就是IVI进行通信,车载终端又通过T-Box连接到基站,前提是由网络运营商作为技术支撑,最后用户又可以使用自己的移动终端设备通过接入TSP,对ICV进行远程控制.
3 智能网联汽车的安全威胁分析
智能网联汽车是将网络世界与物理世界结合在一起,为用户带来更加优质的使用体验.然而,互联互通在带来便利高效体验的同时,也带来越来越严重的信息安全隐患.
其中就存在一些典型的攻击方式,主要针对网联式汽车中数据资源服务器、云服务器、通信链路、身份认证、CAN总线所存在的漏洞而展开攻击.其中DDoS(distributed denial of service)攻击/EDoS攻击、侧信道攻击、中间人攻击及云中间人攻击[3]等主要针对TSP云端基础设施;车载僵尸网络、植入恶意软件、嗅探攻击、黑洞攻击、重放攻击、Sybil攻击、定时攻击[14]等常发生在车载网络系统中.
除此之外,针对于新型T-Box出现了基于车载通信模组信息泄露的远程控制劫持攻击方式、基于V2V通信协议的伪造数字签名攻击.机器学习方法的进步已经成为智能网联汽车的主要驱动力之一,特别是用于不同级别决策的深度学习,在此改变下又催生出了基于生成式对抗网络(GAN)的自动驾驶算法攻击.
3.1 智能网联汽车典型攻击方式与防御
智能网联汽车典型攻击方式及防御手段如表1所示:

表1 智能网联汽车典型攻击与防御
3.1.1 DDoS攻击/EDoS攻击
DDoS攻击是指在不同位置(IP地址)的多个攻击者向相同的攻击目标发送常规的服务器请求,服务器资源因请求超载而瘫痪.其中,不同的源IP地址可以进行伪造,使得入侵检测十分困难,文献[15]详细介绍了DDoS攻击和EDoS攻击对云安全的威胁,并提出了相应的防范措施.
3.1.2 侧信道攻击
侧信道攻击(side channel attack, SCA)是基于目标设备的物理信息(电流、电压、电磁辐射、执行时间、温度等)与保密信息之间的依赖关系,实现对保密信息的获取.这种攻击方式对加密设备造成了严重威胁,如文献[16]通过映射内部云基础设施,使虚拟机(virtual machine, VM)与目标机共存,从而实现跨VM的侧信道攻击,成功提取同一目标VM上的数据信息.
3.1.3 中间人攻击
中间人(man-in-the-middle, MITM)攻击是一种针对通信链路的间接攻击方式,利用技术手段将攻击者置于通信链路中,如车辆攻击中,攻击者通常将自己置于TSP和T-Box之间,然后以MITM身份与通信双方建立正常连接,实现对通信双方数据欺骗.文献[17]指出亚马逊EC2的Java库及其云客户端易遭受MITM攻击.
3.1.4 车载僵尸网络
攻击者利用各种方式传播僵尸程序,在互联网上感染大量智能设备.被感染的设备通过控制通道接收并执行攻击者的指令,致使大范围的目标设备瘫痪,从而形成僵尸网络攻击.文献[18]展示了一种僵尸网络攻击方式,可以在自动驾驶汽车场景中致使车辆瘫痪,造成严重的交通拥堵.
3.1.5 嗅探攻击
嗅探攻击是对汽车CAN总线数据分组、网络数据分组或蓝牙数据分组的一种拦截分析方式.在嗅探攻击下,汽车设备之间的通信可能被窃听,甚至数据被篡改.由于汽车CAN总线中的数据是以广播的形式传播,嗅探攻击是CAN总线攻击方式中使用最普遍、最有效的攻击方法[19].
3.1.6 黑洞攻击
黑洞攻击在通信系统中很常见.在黑洞攻击中,攻击者不是将数据包转发到目的地,而是丢弃它们,从而造成一个没有数据包能够通过网络的漏洞.如果攻击者位于2组用户之间的关键路径上,而没有其他路径存在,黑洞攻击实际上意味着2组用户无法相互通信并被隔离[14].
3.1.7 Sybil攻击
Sybil攻击有时被称为假冒攻击,涉及用户创建大量假名身份.传统上,Sybil攻击用于P2P网络,在P2P网络中,大量用户允许攻击者对网络产生更大的影响.除此之外,Sybil攻击也可用于改变特定方向路由流量[14].
3.2 智能网联汽车新兴攻击方式
智能网联汽车新兴攻击及防御手段如表2所示:
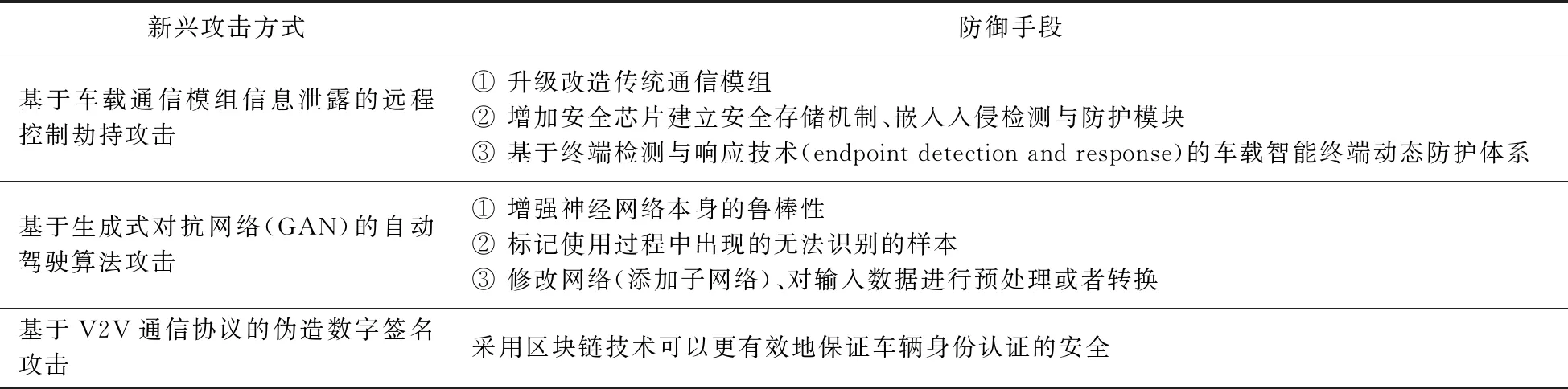
表2 智能网联汽车新兴攻击及防御
3.2.1 基于车载通信模组信息泄露的远程控制劫持攻击
安全研究人员发现中国国内大部分自主品牌汽车,均通过车载通信模块中的T-Box使用私有APN连接车控相关的TSP后端服务器.通过ISP拉专线可以在一定程度上保护后端服务器的安全,但与此同时也给后端服务器带来了更多的安全风险,由于私有APN的存在,TSP不会暴露于公网,导致TSP的安全人员忽视了私有网络和TSP本身的安全问题,同时私有网络内没有设置严格的安全访问控制,过度信任T-Box,使得T-Box可以任意访问私有网络内部资产,同时很多不必要的基础设施服务也暴露于APN私网内,将引发更多安全风险.
3.2.2 基于生成式对抗网络(GAN)的自动驾驶算法攻击
此类攻击的发生源于在深度学习模型训练过程中,缺失了对抗样本这类特殊的训练数据.因此一类常见的防御手段是增强神经网络本身的鲁棒性,将对抗样本放入训练数据中重新训练网络,并提高训练数据的极端情况覆盖率.同时在使用过程中对出现的无法识别样本进行标记,利用此类数据持续训练网络,不断提高输入数据的识别准确率.但是无论在训练过程中添加多少对抗样本,仍然存在新的对抗攻击样本可以再次欺骗网络[3].
科恩实验室发现特斯拉Model S的自动雨刮器、车道识别系统存在漏洞,研究人员通过使用一种名为Worley的噪音生成函数,通过加补丁的方式生成所需的对抗样本图片.最终通过在电视上放映生成的对抗样本图片,成功启动了特斯拉的自动雨刮器.
3.2.3 基于V2V通信协议的伪造数字签名攻击
车辆对车辆(V2V)通信,即车辆之间直接对话,以协调它们的移动和防止碰撞,预计将在不久的将来成为智能、互联的交通基础设施的重要组成部分.V2V通信不需要视线,使V2V成为激光雷达或相机等传感器技术的补充.然而,在重大的安全问题得到解决之前,V2V技术不能认为是足够安全的.例如,如果根据从另一辆车收到的信息预测即将发生的碰撞,司机将需要迅速地作出反应.因此,对传入的消息进行身份验证至关重要;否则,可能会基于伪造的消息采取决定性的操作(例如转向),从而导致碰撞、车道偏离或其他不安全的结果.针对这种攻击,采用区块链技术可以更有效地保证车辆身份认证的安全.
4 智能网联汽车安全防御对策
针对于上述各种典型及新型攻击方式,本节将介绍部分对应的防御手段.
4.1 质询-响应协议
为了抵御DDOS/EDOS的攻击,质询-响应协议(challenge-response protocols, CRP)的出现用于识别用户存在的真实性.质询-响应方案提供了一种简单的方法,通过处理常见的自动化、由机器发起的和基于速率的攻击来实现攻击预防方法.
4.2 异常检测机制
异常检测(anomaly detection)是对不符合预期模式或数据集中方式的项目、事件或观测值的识别.在文献[20]中,作者介绍了针对车载僵尸网络攻击的防护手段,其中异常检测机制发挥出重要作用.
4.3 诊断端口访问控制
大量CAN总线威胁研究实例表明,OBD-II诊断端口是最容易被攻击者利用并实施攻击的一个端口.因此,对OBD-II端口实施访问控制,同时不影响汽车诊断功能的正常使用是一个亟需解决的问题.可用于防御嗅探攻击.
4.4 网络分割
现在很多车辆中已经采用了网络分割的方式来保护CAN总线的安全.网络分割是指将关键ECU和非关键ECU划分在不同的网段中,并用网关严格限制不同网段之间的数据传输.攻击者则无法通过外部ECU直接与关键ECU进行通信,攻击难度将成倍增加[21].
4.5 入侵检测系统/入侵防御系统
CAN总线入侵检测和TSP入侵检测是当今汽车安全领域的热门话题.入侵检测系统的实施,如针对TSP数据分组进行流量分析或针对目标ECU[22]的CAN总线入侵检测和TSP入侵检测是当今汽车安全领域的热门话题.
5 未来研究趋势
当前国内研究智能网联汽车基本是从5G或者CAN总线单个方面进行研究:王雪聪[23]提出在5G的环境下V2X的安全问题;陈颖等人[24]提出了一种自适应的车内CAN总线安全机制;本文从智能汽车的整体架构出发,结合了车内网络以及云端TSP等多个方面进行研究,给出了智能网联汽车面临的安全问题.
目前大多数公开的研究都是被动的,潜在的漏洞通常不会被白帽黑客、业余爱好者和研究人员发现.网络安全挑战正在加剧,网络犯罪正在迅速渗透.以下是几个有待解决的问题,将来应加以解决:
1) 可解释机器学习.ICV中的一个主要安全漏洞是ML模式缺乏可解释性.一般的ML技术和具体的DL技术都基于函数近似的思想,其中经验函数的近似是使用DNN架构来执行的.目前的ML/DL缺乏可解释性,这是导致ML/DL赋权脉冲进展的主要障碍.开发安全的、可解释的和可解释的ML技术用于安全关键的骑士系统应用是另一个开放的研究课题.
2) 车载安全.汽车内部的攻击主要涉及电子控制单元、车载网络、通信模组T-Box.电子控制单元、车载网络已有较多的研究,由于目前关于T-Box的研究较少,主要是安全公司和厂商发布的漏洞报告研究.未来的研究应该集中在通信模组T-Box安全,通信模组T-Box是车内与车外通信的关键环节,其安全是未来重要的研究方向.
3) V2X通信安全.因为对ICV的攻击可能会蔓延到智能基础设施,反之亦然.例如,对电动汽车的攻击可以通过充电设备传播到电网基础设施,直至公用事业系统[25].这一领域的未来研究包括发展安全通信[26]和防御机制[27]等.另一方面,车联网安全还涉及到V2X的安全认证的证书体系及其签发过程,包括根证书、车厂证书、车载单元使用的证书、各种V2X消息证书等.未来基于国密算法的V2X安全芯片将成为解决V2X安全的核心关键[23].
6 总 结
本文研究了智能网联汽车的安全发展趋势、智能网联汽车定义与架构,指出了当前智能网联汽车所面临的安全威胁,以及目前的新型攻击方式和常见安全防御对策.安全研究人员应该了解新型攻击方式及对应防御方法,对包括车载通信模组信息泄露的新型远程控制劫持攻击进行深入的研究.最后给出了当下研究现状并给出对未来研究方向的展望.希望本文能为我国智能网联汽车安全研究提供参考与借鉴.
猜你喜欢
自动化学报(2021年8期)2021-09-28 07:20:18
工业经济论坛(2020年6期)2020-04-13 00:38:20
铁道通信信号(2020年8期)2020-02-06 09:13:18
汽车观察(2018年12期)2018-12-26 01:05:26
汽车观察(2018年10期)2018-11-06 07:05:20
爱你(2018年16期)2018-06-21 03:28:44
中国公共安全(2017年11期)2017-02-06 05:28:09
现代制造技术与装备(2015年4期)2015-12-23 10:20:22
指挥与控制学报(2015年4期)2015-11-01 10:09:34
电源技术(2015年2期)2015-08-22 11:28:14