
基于工业以太网的天祝煤矿斜巷多水平提升监控系统
2021-06-03 09:32刘建荣伊玉祥徐杜民于生存刘君贤
煤矿安全 2021年5期
刘建荣,伊玉祥,徐杜民,杜 磊,于生存,刘君贤
(1.窑街煤电集团 天祝煤业公司,甘肃 天祝733211;2.陕西航泰电气股份有限公司,陕西 西安710100)
天祝煤矿斜井运输物料系统均采用绞车轨道提升方式,在运输过程中存在提升水平多、运输路线长、安全防护设备监控和行人管控难等安全管控难点[1-3]。结合现场实际运输需要,现对斜井提升防护设备和监控设备进行升级改造[4-10],实现功能如下:①安全防护设备和道岔的本地手动、自动控制和远程集中监控;②行人闯入斜巷的视频抓拍和安全警示;③矿车钩头定位、绞车与安全防护设备的线路闭锁;④对一采区轨道运输下山跑车防护装置进行升级;⑤在地面调度监测集控中心进行集中数据采集和管理。
1 系统结构及组成
煤矿斜巷多水平提升监控系统结构图如图1。
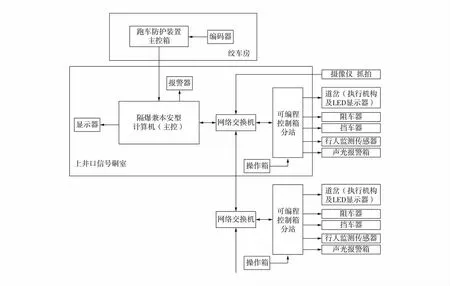
图1 煤矿斜巷多水平提升监控系统结构图Fig.1 Structural diagram of multi-level lifting monitoring system in inclined roadway of coal mine
煤矿斜巷多水平提升监控系统采用主控上位计算机加分控可编程控制箱的连接结构,通过以太网实现系统的数据连接,系统主要由上位监控计算机、显示器,各车场可编程控制箱分站、网络交换机、各类检测传感器、操作箱、高清摄像仪、报警器(箱)和道岔、阻车设备的执行机构等组成。计算机作为核心控制单元实现与各水平车场可编程控制箱分站的数据通讯,对系统内各设备运行状态进行集中状态监控和输出控制。计算机提供人机交互界面,通过显示器对现场设备运行状态进行集中监控,通过鼠标操作实现人机交互、设备状态查询和管理控制;可编程控制箱分站作为各水平车场内信号采集和控制单元对所在水平车场内道岔设备、阻车设备、行人闯入抓拍、报警设备等信号进行到位状态采集和控制操作,可编程控制器采用西门子S7Smart系列PLC;网络交换机用于主控计算机与各车场可编程控制箱间的以太网数据通讯,用于将车场行人闯入抓拍的摄像仪视频信号传至上位计算机;现场检测道岔、阻车设备的状态信号由电感式接近传感器进行采集,行人闯入状态由光电式接近传感器进行检测,矿车钩头位置由旋转编码器进行检测,矿车通过车场的位置信号由速度传感器进行检测;其道岔、阻车设备的动作由可编程控制箱分站控制执行机构进行控制输出,道岔的到位指示由可编程控制箱分站输出控制指令经LED显示屏进行道岔状态显示;操作箱用于道岔、阻车设备的手动按钮控制操作,用于系统工作方式的选择;摄像仪用于车场有行人闯入斜巷危险区域的视频抓拍;报警器(箱)在系统出现故障或有行人闯入斜巷时,经可编程控制箱输出控制指令进行声光语音报警。
2 工作原理
斜巷多水平提升监控系统有手动和自动2种工作模式,可通过上车场信号硐室操作箱旋钮进行工作模式选择。处于手动模式时,系统各车场内道岔设备、阻车器和挡车器可通过就地操作箱按钮进行手动按钮控制操作,也可在计算机监控平台通过鼠标选择进行远端集中手动控制操作;自动运行时,系统根据提升信号的打点指令和矿车钩头位置进行逻辑判断,对运输路线内道岔、阻车器和挡车器进行自动控制操作,提高运输自动化操作水平。
系统主控计算机接收编码器发出的脉冲数进行矿车钩头的位置确定,通过接收各可编程控制箱中PLC发送的道岔到位状态信息,判断现有运输路线情况。计算机经数据通讯读取提升信号指令。根据运输要求,信号工进行提升的路线选择和信号打点操作,主控计算机接收到打点信号操作指令后,将信号打点指令、矿车钩头位置、提升运输路线和所获取的道岔、阻车器、挡车器到位状态信息进行判断,并分解为具体的控制操作指令,随着提升过程对道岔、阻车器和挡车器进行相应的控制操作,确保运输路线畅通,绞车司机将根据提升信号指令进行矿车的正常提升,以保证运输高效安全运行。
各水平车场片口处设置2对光电式行人监测传感器对进入运输斜巷的行人进行检测报警、抓拍和绞车信号闭锁。在提升过程中,当有人员从车场闯入第1道行人监测光电传感器时,光电式传感器进行信号输出,可编程控制箱采集到行人信号后对所连接的报警箱进行输出语音报警,提醒闯入行人请退出,并将所在水平车场的行人报警信息传输至主控计算机,在绞车房报警器输出声光报警信号提醒绞车司机注意有行人闯入提升斜井,并减速停车;当行人违章闯入第2道光电传感器时,所在车场摄像仪对闯入行人进行抓拍并将进行硬盘自动存储,计算机输出信号闭锁指令,绞车进行自动减速停车。
系统处于自动运行模式时,主信号工选择目标车场,矿车钩头所在水平车场(起始车场)信号工进行提升信号打点,各水平偏口道岔根据需要执行1次自动扳道操作,确保矿车可提升到目标车场偏口以上位置,上部车场主信号工收到下部车场打点信号后在系统内道岔状态正常时对打点信号进行第2次确认,绞车司机在收到打点信号后进行矿车提升操作;矿车到达终点车场岔尖以上一定位置后,计算机将自动发出打停信号,绞车司机收到停车指令后执行停车操作,终点车场道岔执行第2次自动扳道操作,道岔操作到位后系统自动发出下放的打点指令,上部车场主信号工收到打点信号后进行打点信号确认,绞车司机收到信号进行矿车下放操作,将矿车下放至终点车场;矿车到达终点车场后终点车场信号工执行打停操作,绞车司机收到打停信号后执行停车操作,1次自动提升过程完成。
在系统处于自动运行模式时,信号工只需对提升信号设备进行正常信号操作即可,辅助运输和防护设备将根据提升信号指令和矿车钩头位置实现其自动控制操作,以保证运输路线 畅通,减少人员操作干预,提高运输效率和安全可靠性。
3 创新应用
该监控系统的应用结合了现场实际需要,对斜井提升过程中的行人闯入危险区域进行改进设计,要求在各车场片口处设置2道行人检测传感器,2道传感器间间距100 cm,传感器安装在巷道壁1 m高左右,在2道传感器中间位置轨道内侧安装1只速度传感器,在巷道顶、朝向行人检测位置装有抓拍用摄像仪。提升过程中,当有行人从车场方向向片口违章闯入时,行走到设置的第1道光电传感器处时,行人检测光电式传感器1被遮挡,传感器感应到有行人闯入,可编程控制箱接收到该信号后,输出报警指令,控制就地声光报警箱进行声光语音报警,提醒行人退出危险区域,同时该信号传至上位计算机,在绞车房(或上车场信号硐室)控制声光报警器输出声光报警信号,提醒绞车司机(或主信号工)注意有行人闯入提升斜井,以备减速停车;行人闯入第1道光电传感器、声光报警提醒后,如行人未及时退出、仍违章前行,第2道光电传感器检测到有行人违章闯入,可编程控制箱将信号传至计算机,计算机接受到该信号后,自动输出闭锁信号,闭锁绞车信号系统,绞车进行自动减速停车,同时计算机发出控制指令摄像仪进行行人闯入的自动抓拍,进行硬盘存储,便于行人闯入的违章查询;将有效提高“行车不行人,行人不行车”的管理规定,保证违章依据可查,为违章事项提供事后查询依据。2道光电传感器中间位置轨道上安装的速度传感器作为车轮检测用,用于区分行人和矿车的通过;系统通过编码器确定矿车钩头所在位置并判断否有提升操作,通过逻辑判断以减少提升过程中矿车通过时的误报警。为保证运输工作的正常进行,在绞车停止运行时,有行人闯入斜巷时只进行视频图像的抓拍和声光报警提醒,对绞车不进行信号的安全闭锁控制。
4结语
介绍了一种煤矿斜巷多水平提升监控系统在天祝煤矿斜井多水平提升中的应用情况,着重从系统结构、工作过程和创新应用进行简要阐述。天祝煤矿井下斜巷多水平提升监控系统监控画面在上车场及绞车房显示,同时传至调度监测集控中心及区队值班室,区队值班人员实时监控井下提升状态,发现违章,及时制止。经现场应用和综合评审看,应用效果较好,确保了多水平提升安全,杜绝提升期间行人闯入绞车道,有效防止伤亡事故发生。为矿井自动化综合监控平台提供了开放的通讯接口和数据,为运输管理、设备管理和安全管理提供了基础性技术数据;能够为后期煤矿生产和安全管理大数据分析提供现实数据。该系统的应用能够有效增强斜井多水平提升运输安全性、可靠性。
猜你喜欢
新能源科技(2022年8期)2022-11-22
消防界(电子版)(2022年19期)2022-11-16
铁路通信信号工程技术(2020年4期)2020-04-28
作文大王·低年级(2020年2期)2020-03-13
数学大王·低年级(2020年2期)2020-03-13
商品与质量(2018年46期)2018-12-08
科技视界(2018年11期)2018-07-31
科技创新与应用(2018年17期)2018-06-28
科学启蒙(2014年10期)2014-11-12
科技致富向导(2013年22期)2013-12-05
