无线充电复合补偿网络及其系统充电控制方法
2021-06-02 23:46:52陈祥修卢闻州
通信电源技术 2021年3期
陈祥修,卢闻州
(江南大学 物联网工程学院,江苏 无锡 214122)
0 引 言
现今,电动汽车无线充电系统已成为研究热潮。为满足电动汽车无线充电系统储能装置锂电池的CC/CV充电要求,文献[3]提出运用LCL-LCL型补偿网络和LCL-S型补偿网络分别实现CC和CV充电。两种拓扑以开关的方式组合而成,主要的缺点在于副边所需元器件较多。文献[4]基于SS型补偿网络提出一种T型补偿网络结构,通过在副边级联多个T型网络能够得到具有CC/CV输出特性的补偿网络,再利用开关的方式对补偿网络进行切换,从而实现CC/CV充电。这种方法的缺点在于副边的系统过于庞大,安装在车载上需占用较大空间。文献[5]提出了一种用于S-LCC拓扑的无源组件优化方法,以降低整个系统的成本。利用这种方法不仅能够将无源组件的数量优化到最少,而且仍然能够实现CC/CV充电。文献[6]采用原边负载识别的方法来控制逆变电路,实现了S-S型补偿网络和S-P型补偿网络的CC/CV充电。这种控制方法是通过采集逆变电路输出电流与电压,对硬件与系统参数的准确性要求较高。文献[7]基于LCC补偿网络提出一种负载估计和去耦控制方法,实现原副边系统的独立控制,达到CC/CV充电目的。这种方法的优点在于原副边之间没有数据通信,缺点在于整个系统的控制方法较为复杂,需采样6个交直流电路参数进行计算控制。
为简化无线充电系统的充电控制方法,减少副边无源组件,一种复合补偿网络及其充电控制方法被提出,用于实现CC/CV充电的同时实现其充电效率的优化。全文对复合补偿网络的输出特性进行了理论推导与分析,并提出了相应的控制方法,再由仿真对理论进行了验证,显出系统的CC/CV输出特性及控制方法对传输效率优化的优越性。
1 无线充电系统补偿网络设计
1.1 具有负载无关性的S-S型补偿网络
S-S型补偿网络如图1所示。其中us为原边输入电压,ue为副边输出电压,C1和C2为补偿电容,L1和L2分别为发射线圈和接收线圈的自感,R1和R2分别为发射线圈和接收线圈的等效电阻,M为线圈互感,Zt为副边到原边的等效阻抗,Re为副边输出等效阻抗,i1通过发射线圈的电流,i2为通过接收线圈的电流。

图1 S-S型补偿电路
根据基尔霍夫定理可得:
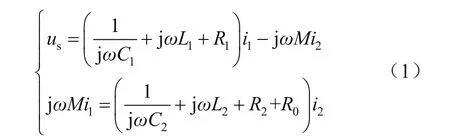
式中,ω为系统谐振角频率。假设电路满足谐振条件jωL1+1/jωC1=0,jωL2+1/jωC1=0,其中ω=2πf为系统工作角频率,f为系统工作频率,进一步得到增益表达式为:

从增益G12的表达式中可以看出,当R1、R2忽略不计的情况下,G12=i2/u2≈j/ωM,i2只与us、M以及ω有关。在系统确定的条件下,这些参数一般不会发生改变,所以i2不会随着Re的变化而变化,这就说明了i2具有负载无关性。
1.2 具有负载无关性的LCL-S型补偿网络
在原来的S-S型补偿网络的基础上加入补偿电感Lt1和Lt2以及补偿电容Ct,得到了如图2所示的LCL-S型补偿电路。

图2 LCL-S型补偿电路
令Z1=jωLt2+jωL1+1/jωC1+R1,Z2=jωL2+1/jωC2+R2,根据LCL-S型补偿网络可以列出基尔霍夫电压方程为:

令Lt1=Lt2=Lt,当电路满足谐振条件jωLt1=jωLt2=-1/jωCt、jωL1+1/jωC1=0 以及 jωL2+1/jωC1=0 时,在忽略发射接收线圈的等效电阻R1、R2的前提下,可以进一步得到以下的增益表达式:

根据增益G11的表达式可以看出,当R1、R2忽略不计的情况下,G11=ue/us≈M/Lt,ue只与us、M以及Lt1、Lt2有关。在系统确定的条件下,这些参数一般不会发生改变,这就说明了ue具有负载无关性。因此,本文利用开关切换的方式将两种补偿网络结合在一个系统中,得到了如图3所示的适用于锂电池充电的复合补偿网路无线充电系统。图3中,Uin为直流电源;Lm为buck电路电感;Cm为Buck电路电容;iL为通过Lm的电流;iout为Buck电路输出电流;Uout为Buck电路输出电压;C3、C4为稳压电容;Req为Boost电路输入等效阻抗;Rb为电池等效负载;U0为Boost电路的输入电压;Ub为Boost电路的输出电压。当开关Q5和Q6闭合,Q7和Q8断开时,锂电池处于CC充电阶段;当Q5和Q6断开,Q7和Q8闭合,锂电池处于CV充电阶段。

图3 复合补偿网络无线充电系统
2 传输效率的优化与充电控制方法的提出
根据式(2)可以得到基于S-S补偿网络的系统电能传输效率表达式为:

同理,根据式(4)可以得到基于LCL-S补偿网络的系统电能传输效率表达式:

从式(5)和式(6)中可以看出,两种补偿网络的系统电能传输效率表达式相同。
令dη/dRe=0即可得到实现传输效率最大化的条件为:

式中,Re-opt为实现最大传输效率所对应的最优阻抗。假设整流环节的损耗可忽略不计,则Boost电路输入电流和输入电压可分别表示为:

式中,I2为i2的有效值,Ue为ue的有效值。另外,还可以得到:

将式(8)代入式(10)化简得:

根据Boost电路特性有:

当Rb发生变化时,可以通过改变α来使Re达到Re-opt,从而使η保持在最大值。
由式(12)可知,当α变化时也会导致负载电流电压发生变化,要使在实现传输效率最大化的基础上,保持充电电流在CC充电阶段保持稳定及在CV充电阶段充电电压稳定,则需要通过调节原边的Buck电路输出电压,进而保证负载电流电压的可调。因此,需要进一步分析D与Ib和Ub之间的关系。
us的有效值Us可以表示为:

由式(2)中的增益G12表达式可知i2的有效值I2=jωMUs/[R1(Re+R2)+(ωM)2],结合式(8)和式(15)能够得到:

将式(14)和(16)代入式(12)可以得到Ib关于D和α的表达式为:

由式(4)中的增益G11表达式可知ue的有效值Ue=MReUs/[(Re+R2)Lt],结合式(9)和式(15)能够得到:

将式(14)和式(18)代入式(13)可以得到Ub关于D和α的表达式为:

从式(17)和式(19)可知,通过调节D和α即可让Ib达到参考值Ib-ref,Ub达到参考值Ub-ref。因此,为进一步在CC/CV充电的基础上实现系统电能传输效率的优化,需计算出充电过程中每个Rb对应的最优Buck电路占空比Dopt和αopt。由式(14)变换得α=1-(π2Re/8Rb)1/2,结合式(7)消去Re可得Boost电路占空比α达到最优值αopt的表达式为:

将式(20)代入式(17)和式(19)化简后可分别得到CC充电模式和CV充电模式下,Buck电路占空比D达到最优值Dopt的表达式。CC充电模式下的表达式为:

CV充电模式下的表达式为:

将占空比αopt与Dopt分别赋给Boost电路和Buck电路,系统实现CC/CV充电以及传输效率的优化。
3 仿真验证
为了简化仿真,使仿真结果更加直观,本文将CC充电阶段和CV充电阶段分开进行仿真来验证理论的正确性。仿真参数如表1所示。

表1 仿真参数
图4为CC充电波形,图5为CV充电波形。从图4中可以看出,当Rb由35 Ω增大到50Ω时,Ib能够保持定值。图4中给出了理想条件下(发射接收线圈无R1和R2)的充电电流波形,Ib值更接近充电电流参考值(2 A)。从图5中可以看出,当负载由225 Ω增大到300 Ω时,Ub能够保持定值。图5中给出了理想条件下的充电电压波形,Ub值更接近充电电压参考值(100 V)。

图4 CC充电波形

图5 CV充电电压波形
图6为优化的CC充电波形,图7为优化的CV充电波形。从图6中可以看出,采用上述控制方法能够保持Ib稳定在2 A左右,同样的从图7可以看出Ub能稳定在100 V左右。

图6 优化的CC充电波形

图7 优化的CV充电波形
图8是CC模式优化前后的传输效率对比波形,图9是CV模式优化前后的传输效率对比波形。从图8和图9中可以看出,通过控制优化能够显著提升传输效率。

图8 CC模式优化前后的传输效率对比波形

图9 CV模式优化前后的传输效率对比波形
4 结 论
本文验证了S-S型补偿网络和LCL-S型补偿网络输出的负载无关输出特性,并基于复合补偿网络无线充电系统提出了相应的控制方法,最后实现了系统CC/CV充电以及传输效率的优化。
猜你喜欢
中国特种设备安全(2021年9期)2021-03-02 05:40:46
数学物理学报(2020年2期)2020-06-02 11:29:10
安顺学院学报(2020年1期)2020-04-05 10:57:20
山东冶金(2019年5期)2019-11-16 09:09:38
现代计算机(2019年6期)2019-04-08 00:46:50
测控技术(2018年2期)2018-12-09 09:00:46
人生十六七(2016年14期)2016-12-01 05:24:26
通信电源技术(2016年3期)2016-03-26 07:13:14
防灾减灾学报(2015年3期)2015-12-16 16:15:40
现代农业(2015年1期)2015-02-28 18:40:09