基于模糊PID算法控制的大蒜储藏室通风系统的研究∗
2021-06-02 07:28张卫锋张灿祥刘致君
计算机与数字工程 2021年5期
张卫锋 张灿祥 刘致君
(青岛科技大学机电工程学院 青岛 266061)
1 引言
大蒜作为我们日常生活随处可见的物品,在食用方面,它可以使菜品更加美味;而在药用方面,大蒜中的成分可以起到排毒清肠,降低血糖,防治心脑血管疾病,抗癌等作用[1]。随着经济全球化的快速发展,我国大蒜的出口量遥遥领先,因而就有了世界大蒜看中国的美称。
近年来,随着人们对大蒜的需求越来越多,大蒜的种植面积和产量也在逐年递增,因此,大蒜储藏室的需求也在不断增加[2]。由于大蒜储藏室内复杂的环境因素(温度、湿度、CO2和O2浓度等)难以控制,从而导致了大蒜在长时间的运输、储存过程中变质和腐烂。本文研究基于模糊PID算法控制的大蒜储藏室通风系统,目的是使大蒜在运输和储存的过程中能够保持新鲜[3~5]。
2 大蒜储藏室通风系统总体方案设计
对于大蒜储藏室内复杂的环境因素来说,运用温湿度、CO2等多种传感器对其中的数据进行采集,运用信息融合技术对传感器搜集来的数据进行融合处理[6~8],并以此来确定通风量的数值,送入到模糊控制器里面,再通过模糊控制器的计算,获得相应的控制量并传送到STM32F407ZGT6单片机中[9],从而实现对通风机组的控制。其工作原理如图1所示。

图1 大蒜储藏室通风系统模糊PID控制结构
其工作原理为利用传感器对大蒜储藏室的相关数据进行采集,并将采集信息利用信息融合技术进行两级融合(卡尔曼滤波融合算法、BP神经网络融合算法)处理[10~12],得到给定值r,送入到模糊PID控制器,输入通风量的偏差e和偏差变化率ec,经过模糊系统运算,得到输出调整值Δkp、Δki、Δkd,与设定好的PID控制器初始值进行叠加,即得到最佳的参数,最后送入到STM32F407ZGT6单片机中,产生对通风机组的控制信号,输出通风量y,最终实现对大蒜储藏室通风量的连续实时调节[13]。其中,该系统中的信息融合技术以及模糊PID控制算法的具体流程将会在下文中一一介绍。
3 信息融合系统结构设计
由于大蒜储藏室内的不同区域的环境参数存在着很大区别,故需要在大蒜储藏室内不同区域设置相应的传感器对数据进行采集。本文主要是对储藏室内的温度、湿度、氧气和二氧化碳这四种环境参数进行融合处理,结构框图如图2所示。
由图2可以看出,通过传感器搜集到的储藏室内的环境参数,经过卡尔曼滤波融合算法进行一级融合计算,再通过BP神经网络算法对不同类型的环境参数进行二级融合,得到信息融合后的结果,即为通风量。下面将对两种融合算法的原理分别介绍。
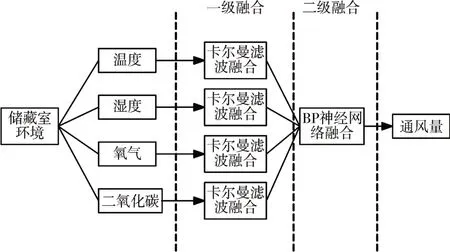
图2 信息融合结构图
3.1 信息融合的方法
信息融合技术是将不同类型的信息匹配相应的融合结构模型,通过层次划分进而实现融合处理,最终得到满意的融合结果。
综合大蒜储藏室环境参数的特点是具有实时多动态性,易获得各参量。故卡尔曼滤波融合算法和BP神经网络融合算法可以作为大蒜储藏室环境参数融合的最佳选择,为后期的计算提供最优的输入。
3.2 卡尔曼滤波融合算法
对信息的无偏估计是卡尔曼滤波器的突出特点,它应用最多的场合就是对于一个环境中,环境因素一直是变化的,并且还有多个传感器进行检测搜集数据的融合处理。该算法的核心就是大量数据进行统计,找出其中的规律,经过不断地递推,得到最优解。其算法基本流程如图3所示。

图3 卡尔曼滤波算法流程图
其原理是:首先设定系统状态的初始值X(0|0)和协方差初始值P(0|0)作为该算法的初始状态;当到达k时刻时,得到k时刻的状态值(k|k-1)和k-1时刻的协方差矩阵P(k|k-1);然后在时间k更新最优估计X(k|k)、并更新卡尔曼增益Kg(k);而后更新k时刻的协方差矩阵P(k|k);就这样按照这个顺序,不断地叠加,最终找到最优解。为下一步的二级融合提供理论意义上的精确值。
3.3 BP神经网络融合算法
BP神经网络算法是可以聚集多层因素来进行单向传递,其基本思想就是梯度最速下降法,通过不断地搜索来调整各层之间的连接权值,以此来达到实际的输出与预期想要的输出之间存在最小的均方误差,最终得到最小误差值。
对于本文来说,经过上面的卡尔曼融合算法进行一级融合后的环境参数有温度、湿度、氧气和二氧化碳这四种参量,它们分别为非线性函数F=f(u1,u2,u3,u4)。综合考虑单隐含层BP神经网络的逼近效果最好的优势。所以,本文采用单隐含层BP神经网络来融合上面的四种数据,大蒜储藏室通风量为输出。结构如图4所示。
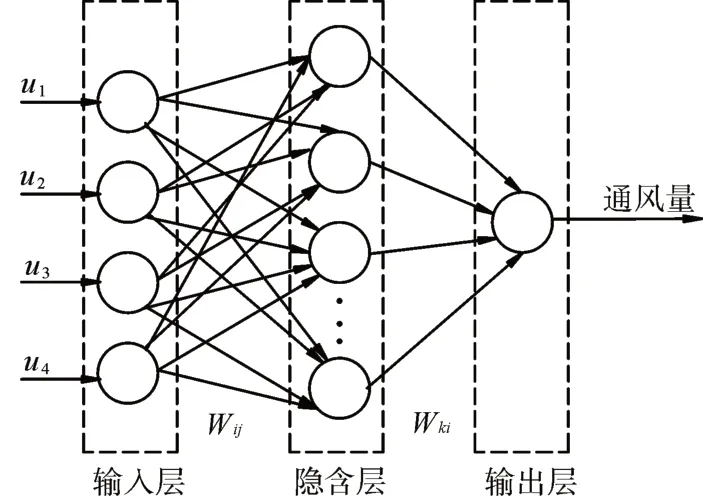
图4 单隐含层BP神经网络结构
从上述结构和经验公式:

即q=9。其中,q、M分别为隐含层神经节点个数和输入层神经元节点个数。
由于BP神经网络的权值调整为梯度下降法,故双曲正切函数正适合作为隐含层的激励函数:

隐含层的输出为

式中:xi、xj、bi、wij分别为隐含层第i个神经元的输出、输入单元、第i个神经元的阈值、输入层中第j个神经元对隐含层中第i个神经元的连接权。
假设将输出节点的激励函数作为线性函数,则整个网络的输出为

式中,wki表示隐含层第i个节点与输出层第k个节点的连接权系数。
对于大蒜储藏室复杂的环境因素来说,经过卡尔曼一级融合处理后,将数据送到BP神经网络二级融合处理,该融合算法的基本流程如图5所示。

图5 BP神经网络算法流程图
算法的具体实施步骤为
1)初始化。
2)提供顺序赋值的输入向量x(1),x(2),…,xN和期望的输出变量t(1),t(2),…,tN。
3)通过式(5)计算隐含层、输出层和各神经元的输出。


4)通过式(7)计算期望值与实际输出差值。
若实际的输出值不能够满足预先设好的期望值,则把误差进行反向传播,通过对加权系数的不断调整,从而得到期望的输出值。其中,每个样本p的二次型误差函数如下:

5)通过式(9)计算调整输出层的加权系数。
当样本p作用时,输出层任意神经元k的加权系数增量公式为:

6)通过式(10)计算调整隐含层的加权系数。
当样本p作用时,隐含层的任意神经元i加权系数增量公式为

7)若误差不能满足要求,则返回第3)步继续进行循环,一直循环到误差满足预先设好的要求为止,跳出循环,得出最佳结果。
以上即为BP神经网络的具体计算流程,通过反复迭代得到一个最优解,为下一步的核心算法,即模糊PID算法,提供一个最佳的输入值。
4 模糊PID控制系统设计
4.1 传统PID控制算法原理
PID控制算法具有控制原理简单,易理解,控制的稳定性较好,并且在调试和运行方面比较方便的特点,因此在各种控制工程中,使人们首先想到的就是它[14]。其控制原理如图6所示。
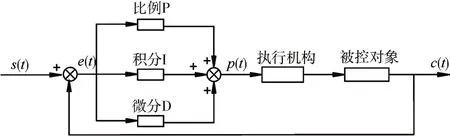
图6 PID控制原理图
由图6可得,PID控制算法是对系统的偏差分别以比例、积分、微分的形式进行线性组合计算。
其中PID控制算法的输入量为系统设定值s(t),与实际测量值c(t)的差值,即

对于传统的PID控制算法的基本公式为

其传递函数的形式为

式中,Kp、Ti、Td、p(t)、e(t)分别为系统的比例系数、系统的积分时间常数、系统的微分时间常数、系统控制量、系统偏差。
增量式PID就是改进后的PID算法[15],根据它的特性,应用于本文非常合适。增量式PID控制算式:
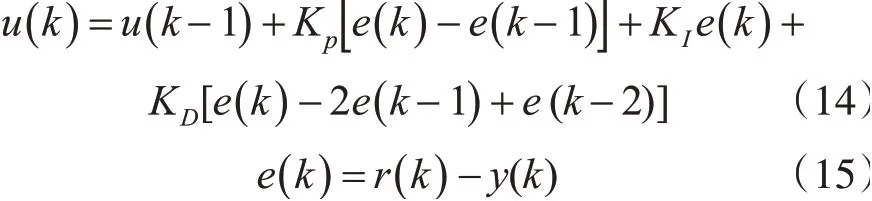
公式中:KP、KI、KD分别为比例、积分、微分系数。uk、y(k)、r(k)、e(k)分别为PID的控制器输出、供热系统的加权位移量、温度设定量、时间k时的位移系统设定量与加权位移量的偏差。
通过以上的分析,可以看出传统的PID控制算法需要被控制对象具有比较精确的数学模型。而关于大蒜储藏室通风系统具备非线性、时变滞后的特点,单单依靠PID算法很难达到精确的控制。所以本文综合经典模糊控制理论和增量式PID算法的优点,就形成了经典的模糊PID控制算法。下面将对模糊PID控制算法进行详细设计。
4.2 模糊PID控制系统设计
1)模糊控制理论
模糊控制理论是依托于模糊数学和控制理论的基础迅速发展起来,并应用于很多行业[16]。其控制方法就是模拟人的思维决策过程。其典型特点是:摆脱了精确数学模型的束缚;引用模糊理论进行模糊推理;对于任何的复杂系统具有比较强的适应能力;鲁棒性好。大蒜储藏室的环境是一个多变量、时变和滞后的复杂被控对象,使用模糊控制来控制大蒜储藏室的通风是合适的。其具体流程如图7所示。
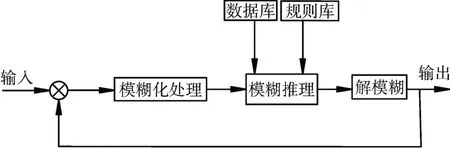
图7 模糊控制器的流程图
2)模糊PID控制系统设计
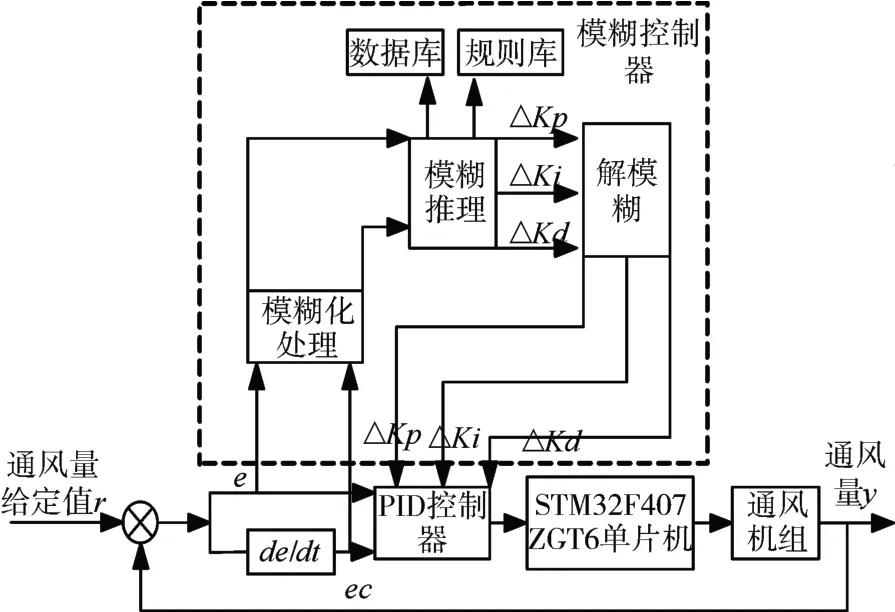
图8 模糊PID控制的大蒜储藏室通风系统结构图
如图8所示,经过信息融合技术对大蒜储藏室采集的环境数据进行两级融合,并以融合结果作为依据,获得通风量的给定值r,以通风量的偏差e和偏差变化率ec作为输入,进入到模糊控制器内,得到PID控制器的三个参数分别为Kp、Ki和Kd。通过模糊控制器内的模糊化、模糊推理和解模糊计算,来确定Kp、Ki、Kd与e、ec之间的模糊关系,在系统的运行期间,连续检测e和ec,根据不同的e与ec对PID控制器参数的需求模糊推理出三个参数的增量ΔKp、ΔKi和ΔKd[17~18]。然后计算PID公式以获得系统的最佳输出值传入STM32F4072GT6单片机中,输出控制信号,控制通风机组的通风量。以此来完成对大蒜储藏室的环境的精确控制,保证大蒜的新鲜不变质。
其算法流程图如图9所示。
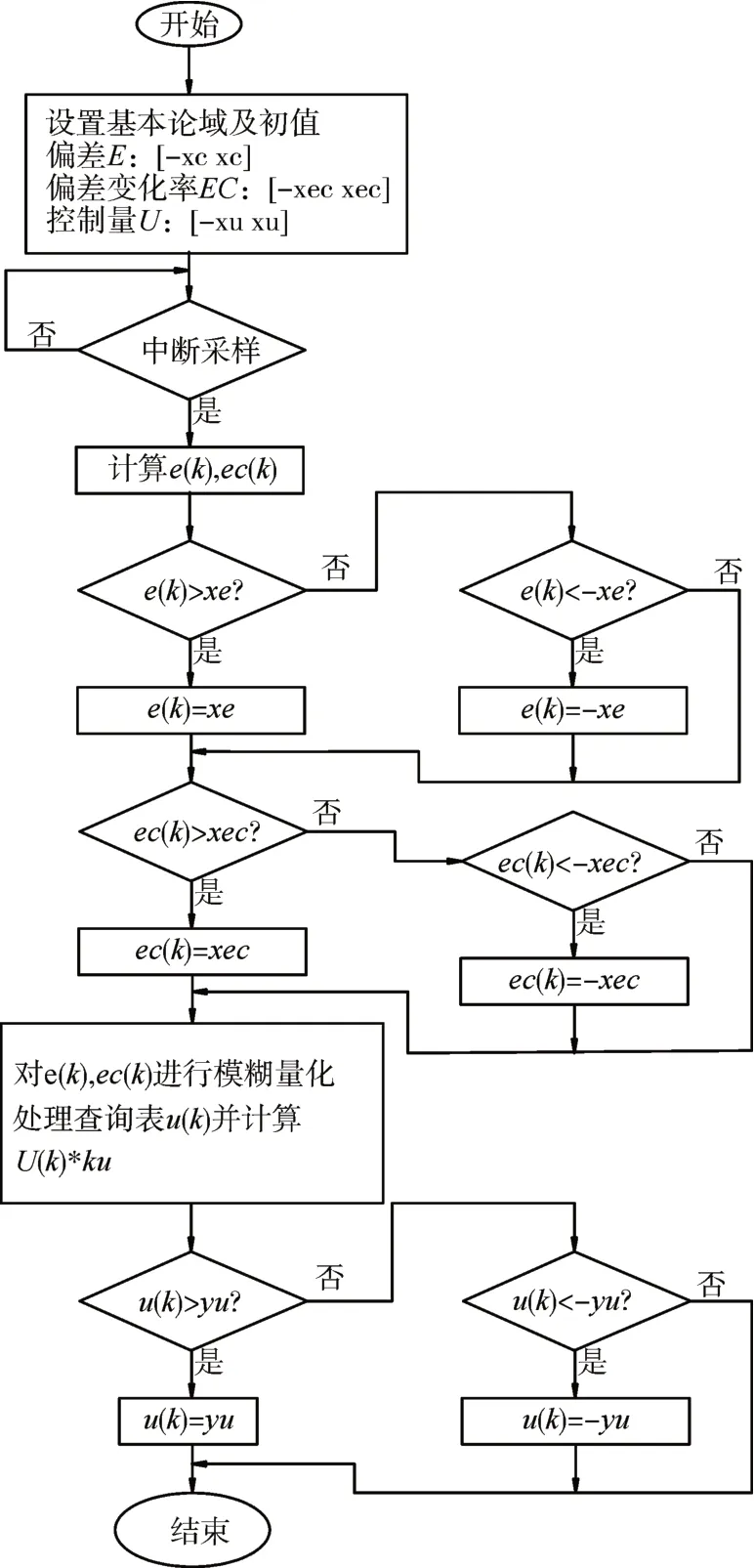
图9 模糊PID控制算法流程图
5 数据分析对比
选择体积为10m3相同的两个储藏室,在相同的环境条件下,设置PID仿真参数为kp0=10,ki0=5,kd0=0.2。观察模糊PID算法与传统PID算法的阶跃响应曲线[19]。仿真结果分别如图10、11所示。
通过图10与图11可以看出输出响应具有明显的延迟,说明大蒜储藏室通风系统具有明显的滞后性。对比两图可得到表1所示的参数。
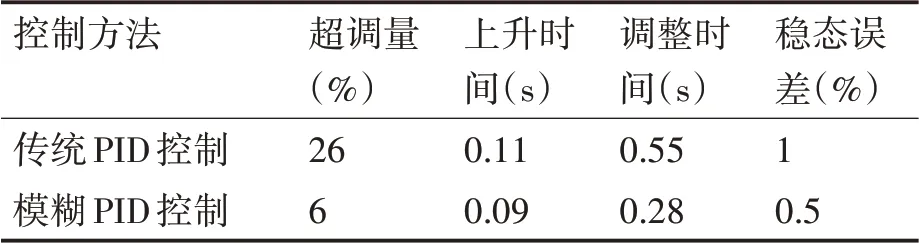
表1 参数比较
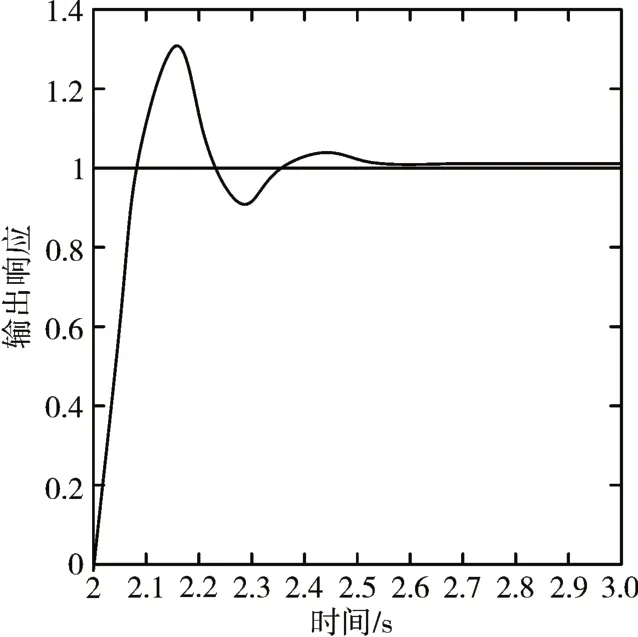
图10 传统PID控制阶跃响应图
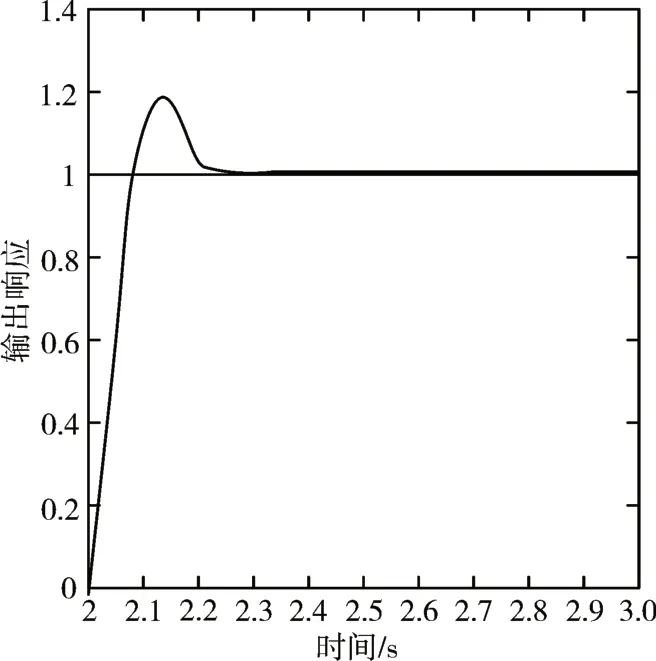
图11 模糊PID控制阶跃响应图
通过观察表2的数据,可以明显看出模糊PID控制器完成了对PID控制参量的动态调整,整个仿真曲线显得格外的协调,从数据的传入到系统的响应这个过程需要的时间是非常短的,并且超调量小,上升时间快与调整时间相对较快,稳态误差也小。而传统PID算法控制就显得有些笨拙。所以通过模糊PID算法控制可以及时地对大蒜藏室复杂的环境变化实现对通风量的迅速自动调节,保证了大蒜储藏室内的温度、湿度等保持良好的效果,从而保证大蒜的新鲜不变质。
6 结语
本文设计研究的大蒜储藏室控制系统十分新颖,具体以STM32F407ZGT6单片机为核心控制组件,针对大蒜储藏室内复杂的环境因素,采用信息融合技术,通过卡尔曼滤波对同类型不同区域的采集到的环境信息进行一级滤波处理;然后进行BP神经网络二级融合。将两级融合后得到的结果送至模糊PID控制器中,通过经典的模糊理论结合增量式PID的优点,对结果进行处理,得到最优解:而后送至STM32F407ZGT6单片机中,控制通风机组的工作;最后对数据进行仿真分析,得到基于模糊PID控制的响应效果优于传统PID控制器。本套算法具有自整定的强大功能,可以对大蒜储藏室内的环境进行实时调节,保证了大蒜在长时间储藏、运输中保持新鲜不变质。
猜你喜欢
数学大王·中高年级(2021年12期)2021-12-23
现代家长(2019年2期)2019-03-18
中国测试(2018年9期)2018-05-14
现代农业科技(2017年1期)2017-03-06
电脑知识与技术(2016年20期)2016-08-19
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
山东农业科学(2014年12期)2015-03-10
现代电子技术(2014年3期)2014-03-05
小小说月刊(2013年1期)2013-05-14