
新型骨外固定架的运动学分析
2021-05-29 01:21李一丹王明泉方子彬张浩杰程志勇
科学技术与工程 2021年11期
李一丹,王明泉,方子彬,张浩杰,程志勇
(中北大学国防重点实验室,太原 030051)
在骨科手术中,复杂的多维畸形矫正和骨折复位一直是困扰人们的难题。据统计,中国每年有上千万人严重肢体创伤、四肢畸形以及肢体残缺, 众多传统骨科技术难以治疗这些疑难骨科杂症, 需要用现代骨外固定技术才能获得满意疗效[1]。
骨外固定技术是在骨折两端的骨段上用钢针或钢钉经皮肤和软组织穿过骨结构,再使用连杆和固定夹将皮外的钢针或钢钉连接固定在外固定架上,依据牵拉性组织再生的张力-应力法则[2-3],即生物组织被缓慢牵拉时会产生一定的张力,可刺激组织再生和活跃生长,达到骨折两端良好复位和局部损伤控制的目的。该技术除用于治疗骨折,还可以用于矫正各种骨骼畸形[4]。
20世纪60年代,苏联医生Ilizarov提出“张力-应力法则”并发明了Ilizarov环形外固定架。Ilizarov骨架只能一步一步纠正畸形,根据每种畸形重新组装和调整,这是一个非常耗时的过程,将增加患者暴露在辐射中的时间,同时还需要大量的临床经验[5]。直到基于 Stewart 平台的Taylor为代表的空间支架出现,才使上述问题得到很好解决,Taylor空间支架可同时矫正多个平面的畸形,提高了矫正的准确性,缩短了矫正股骨畸形的时间。但其装配要求相对严格,组件选择十分关键,要求有标准的环径,与固定环连接的支杆需按照一定规则进行布置。由于结构单一、空间受限,在实际矫形过程中,容易造成支杆与肢节间相互干扰,因此需要重新安装,这将给病人带来更多痛苦,同时也增加了手术风险[6]。2009年6月15日,俄罗斯Leonid Solomin等申请提出Ortho-SUV骨架(OSF)。其在Ilizarov环形外固定架的基础上添加新的并行平台,即每个环仅连接3根支杆,其他3根支杆连接到相邻支杆的侧面。该框架不受环的大小和形状影响,能够在所有平面上纠正6个轴的畸形,提高了矫正的准确性,但由于它的结构特点,一根杆长变化将引起整个支架位姿发生复杂变化,只适用于经验丰富的外科医生,当需要矫正多种畸形时,校正结构组装不当将会导致继发畸形[7]。
现结合上述三种骨外固定支架结构的优缺点,通过增加平连接片与Z形连接片对 Taylor空间支架优化,得到一种新型骨外固定架,结构主要包括:两个固定环、六根长度可调连杆、平连接片和Z形连接片、钢针以及固定夹。
医生在使用骨外固定架时,需将安装参数与配套的电脑软件相结合进行模拟矫正,最终通过矫形软件计算得到处方。而目前医院所使用的软件为美国Taylor固定架软件系统与俄罗斯Ortho-SUV固定架软件系统。因此,将骨外固定架结构以及配套软件系统国产化将推动中国骨骼矫形医疗器械的发展与进步。而运用机器人学对骨外固定架进行数学建模以及运动学分析在软件系统中至关重要。文献[8]在stewart平台基础上对Taylor固定架建模以及运动学分析,但没有进行误差分析。文献[9]对Ortho-SUV固定器建模以及运动学分析,正解的条件数据与逆解的结果数据之间的相对误差小于0.01%,验证了运动学模型的正确性。在运动学分析的基础上,现进行数值算例验证本固定架模型的准确性,并进一步得到位置工作空间和方向工作空间。这对改善中国以临床经验为主的骨科治疗骨折和畸形骨科现状具有重要意义。
1 新型骨外固定架
1.1 基本结构
所提出的骨外固定矫形支架结构如图1所示,是由两个固定环(基本环和移动环)、6根支杆及相应的零部件组成。医生可根据患者情况,选择平连接片或Z形连接片安装在固定环的安装孔中,相较Taylor空间支架具有较大的可调空间。还可选择合适长度和调节范围的6根连杆,安装在固定环的剩余孔位上。调节6根支杆的长度,移动环的位置和方向会随之改变,当移动环固定的变形骨移动到与参考骨解剖轴线重合的位置,复位骨折。其中基本环固定参考骨,移动环固定变形骨[10]。

图1 骨外固定矫形支架Fig.1 Bone external fixation orthopedic bracket
1.2 坐标系的建立
所描述的运动学模型适用于不同结构和尺寸的新型骨外固定架,以及Taylor支架。图2为该矫形支架结构简图,其中,支杆按逆时针方向编号1~6,连接片与基本环连接的结点为A1~A6,与移动环连接的结点为B1~B6。支杆长度定义为相对应结点之间的距离,例如,支杆#1的长度为|A1B1|。在基础环上建立定坐标系O-XYZ,在移动环上建立移动坐标系O′-X′Y′Z′。其中,原点O位于上固定环圆心处,X轴指向A1,Z轴垂直向上,Y轴由右手定则确定;原点O′位于下固定环圆心处,X′轴指向B1,Z′轴垂直向上,Y′轴由右手定则确定。

图2 骨外固定矫形支架结构简图Fig.2 Sketch of the Bone external fixation orthopedic bracket
根据上述空间直角坐标系,通过向量X=[px,py,pz,θ,φ,ω]T描述动坐标系相对于定坐标系的位置和方向。从动坐标系到定坐标系的变换可以用一个矩阵T[11]表示为

(1)
式(1)中:P=[px,py,pz]T为位置向量,表示移动坐标系O′-X′Y′Z′的原点O′相对于定坐标系O-XYZ原点O的位置;欧拉角变换矩阵R为3×3矩阵,其中θ、φ、ω为3个欧拉角,分别为动坐标系围绕定坐标系Z、Y、X轴的旋转量;c和s分别代表函数cos和sin。
1.3 运动学建模


R1=L13L35L51/[(L13+L35+L51)(-L13+L35+
L51)(L13-L35+L51)(L13+L35-L51)]1/2
(2)

(3)
支架模型如图1所示,在A6处选用Z形连接片连接杆6,其他结点都用平连接片连接,因此,结合连接片的参数,与基本环连接的结点Ai在固定坐标系O-XYZ中的位置向量表示为
(4)

图3 基本环坐标Fig.3 Coordinates of basic ring

图4 移动环坐标Fig.4 Coordinates of moving ring
同理,与移动环连接的节点Bi在动坐标系O′-X′Y′Z′中的位置向量bi=[bix,biy,biz]T也可得到。
2 运动学模型求解
2.1 逆运动学分析
骨外固定矫形支架上固定环相对于下固定环的位姿由6根连杆长度决定,在手术中对支架进行固定时,需求解上固定环在当前位姿下6根连杆的长度,通过逆运动学分析进行求解。
利用式(1),将坐标系O′-X′Y′Z′中Bi(i=1,2,3,4,5,6)的位置向量bi转换为O-XYZ中的位置向量Bi=[Bix,Biy,Biz]T,即
(5)
杆长Li可以用向量关系表示为
Li=Bi-Ai=P+Rbi-Ai
(6)
各杆的杆长Li为向量Li的范数,表示为
(7)
2.2 正运动学分析
在骨外固定架安装后,可通过连杆上的刻度标记读出各连杆长度,由各连杆长度确定当前固定环的空间位姿,需通过正运动学分析进行求解。再通过调节连杆长度调整下固定环位姿,进而达到对骨折的整复以及畸形矫正。
由于并联机构比较复杂,求解位置正解比较困难,常用的计算方法有解析法和数值法[12-13]。解析法是通过消元法消去约束方程组中的未知量,求出所有解,但过程烦琐,计算速度较慢。数值法是通过建立一组非线性方程,使用近似法对非线性方程组进行求解,从而计算出与输入连杆长度对应的动平台的位姿,常用的如牛顿-拉夫逊方法(Newton-Raphson method)[14],可避开复杂的矩阵运算。因此,现采用数值法进行求解,通过对连杆长度进行迭代计算,对得到的动平台位姿不断修改,最终近似求解出一定杆长下动平台的位姿。

(8)
建立关于动平台原点O′的运动学雅可比矩阵,记为J,即
(9)
6根连杆的长度与动平台坐标系原点O′的速度关系为
(10)

J[ΔX(1),ΔY(1),ΔZ(1),Δθ(1),Δφ(1),Δω(1)]T
(11)
(12)

首先构建旋转向量a=[Δθ(1),Δφ(1),Δω(1)]并求a的2范数th,由罗德里格斯公式(Rodrigues’s Formula)可得
Rot=cos(th)·I+[1-cos(th)]·bTb+sin(th)·K
(13)

因此第一次修正后的旋转矩阵为
R(1)=Rot·R(0)
(14)
式(14)中:R(0)为初始位姿下的旋转矩阵。最终由R(1)便可求得(θ1,φ1,ω1)。



3 正确性验证
选用图1所示骨外固定矫形支架组合结构,编写MATLAB程序对其运动学分析进行验证。实验参数如表1所示。
其中,定平台各铰接点A1、A2、A3、A4、A5、A6在定坐标系O-XYZ下的坐标值如表2所示,动平台各铰接点B1、B2、B3、B4、B5、B6在动坐标系O′-X′Y′Z′下的坐标值如表3所示。

表1 实验参数Table 1 Experiment parameters

表2 定平台各铰接点在定坐标系下坐标Table 2 The coordinates of each hinge point of the fixed platform in the fixed coordinate system

表3 动平台各铰接点在定坐标系下坐标Table 3 The coordinates of each hinge point of the movable platform in the fixed coordinate system
表4列出了三组运动学模型的正解和逆解。其中,正向解是根据上述正运动学分析得到的, 假定动平台的初始位姿为(0,0,-120,-5,0,0),取允许偏差σ=1×10-6,输出动平台位姿,逆解是将正解的结果[px,py,pz,θ,φ,ω]作为条件由逆运动学分析求得。从表4可以看出,正解的条件数据与逆解的结果数据之间的相对误差小于0.01%,表明运动学模型和解是正确的。

表4 运动学模型的正解和逆解Table 4 Forward and inverse solution examples of the kinematics model
4 工作空间的确定
4.1 限制工作空间的因素
工作空间的确定在平行机制的分析中起着重要作用[15]。骨外固定支架的工作空间是由支杆的伸缩范围、虎克关节的角度约束和支板之间的运动干扰等约束条件决定。
4.1.1 支杆长度约束
在运动过程中,各支撑杆的长度必须限制在一定的范围内。将各杆件的长度范围设为相同,Lmax为最长杆长度,Lmin为最短杆长度。支杆长度约束为
Lmin≤Li≤Lmax,i=1,2,3,4,5,6
(15)
4.1.2 虎克关节角度约束
虎克关节角σi必须小于其最大允许角σmax,即
σi≤σmax,i=1,2,3,4,5,6
(16)
4.1.3 支杆干扰约束
如果d是每根支杆的直径,di是相邻两支杆的中心线之间的最短距离,则两根支杆不干涉的条件为
di≥d,i=1,2,3,4,5,6
(17)
4.2 仿真实例
通过蒙特卡罗方法得到位姿参数[px,py,pz,θ,φ,ω],然后通过逆运动学方法计算出支杆长度li,虎克关节角度σi和相邻支杆之间的距离di。工作空间可通过判断约束条件是否满足来获得。结果如图5、图6所示,工作空间中的位姿参数的范围显示在表5中。在示例中,Lmin=60 mm,Lmax=350 mm,σmax=70°,d=15 mm。

图5 旋转角度为(30°,0°,0°)的位置工作空间Fig.5 Position workspace with the orientation(30°,0°,0°)
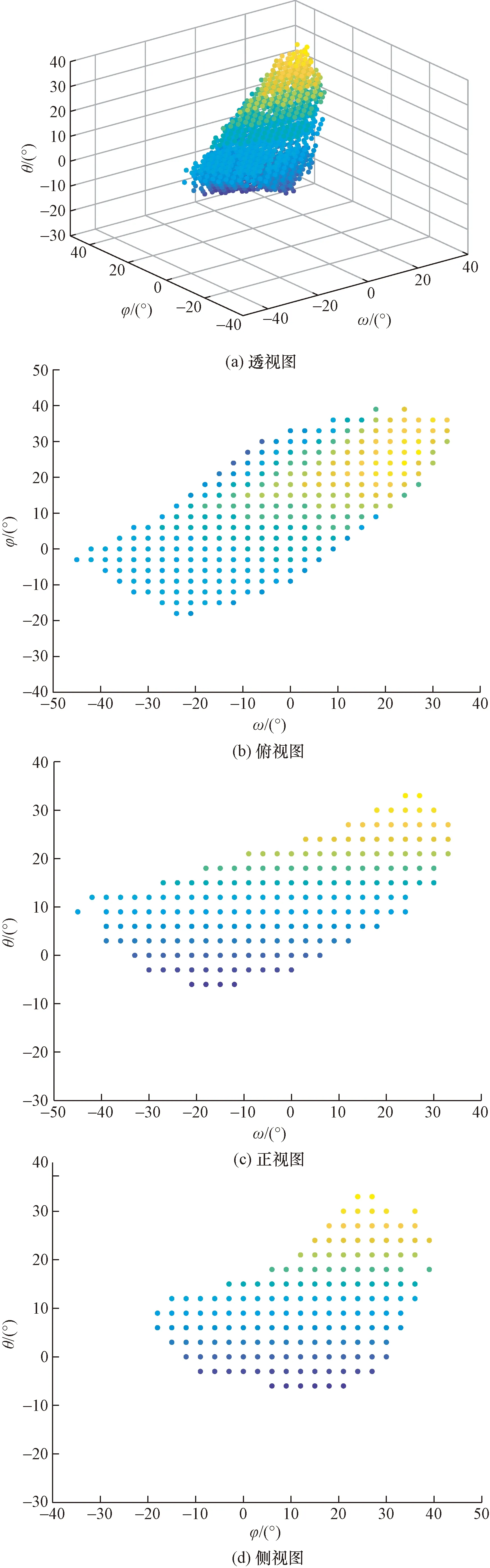
图6 位置在(0 mm,0 mm,-148 mm)的方向工作空间Fig.6 Orientation workspace with the position (0 mm,0 mm,-148 mm)

表5 位姿参数的范围Table 5 Range of the pose parameters
表5给出了该骨外固定架在某位置或姿态下的空间运动范围,它决定了骨外固定架可以修正变形的范围。工作空间的分析可以为医生根据患者的骨畸形、骨折严重程度或肢体的大小选择合适的骨架提供有用的信息,还可有效避免严重畸形超过系统的还原能力。
5 结论
通过增加平连接片与Z形连接片对 Taylor空间支架优化,提高了矫形支架的灵活性和实用性。建立了该骨架的运动学模型,适用于骨架的各种装配形式,以及Taylor骨架,并给出了该运动学模型的正解以及逆解,解不需要进行复杂的矩阵运算,初始迭代值容易选择。通过数值算例,验证了运动学模型及其正解和反解的正确性。并在MATLAB中对骨架的工作空间进行了仿真,它可以帮助外科医生制订术前计划和确定合适组件尺寸的骨架。运动学模型为该骨外固定矫形支架在肢体骨折畸形治疗中的应用提供了理论支持。结合其结构灵活、治疗空间大的优点,能为患者带来更方便、更准确的治疗,进而对促进中国骨科智能化医疗的发展与进步具有重要意义。
猜你喜欢
昆明医科大学学报(2022年9期)2022-11-19
科技资讯(2021年33期)2021-01-15
中国金属通报(2020年23期)2020-12-08
现代信息科技(2020年22期)2020-06-24
日用电器(2019年9期)2019-09-27
山东工业技术(2019年16期)2019-07-19
电子技术与软件工程(2019年6期)2019-04-26
科技视界(2019年2期)2019-03-25
航空世界(2019年7期)2019-02-16
科技与创新(2018年12期)2018-06-22
