
基于MRAS 的机电液耦合器用IPMSM 无速度传感器控制
2021-05-25 10:04:00张洪信赵清海
科学技术创新 2021年11期
闵 磊 张洪信* 赵清海 杨 健
(1、青岛大学机电工程学院,山东 青岛266071 2、青岛大学动力集成及储能系统工程技术中心,山东 青岛266071)
机电液耦合器结构复杂,使用环境恶劣,为了避免不必要的设计麻烦,减少成本,该装置中的内置式永磁同步电机采用无速度传感器设计,因此对机电液耦合器中的内置式永磁同步电机无速度传感器控制的研究意义重大[1]。目前PMSM最常用的转速辨识控制算法包括:滑模观测器算法、扩展卡尔曼滤波器算法、模型参考自适应控制算法等[2]。滑模观测器法对电机参数变化不敏感,对外部扰动具有一定的抗干扰性,但该方法会增加电机的抖动,影响参数的估计精度[3]。扩展卡尔曼滤波器算法在抗干扰和鲁棒性方面具有优良的性能,但其建模比较繁琐,计算量较大,对控制器要求较高[4-5]。模型参考自适应控制算法具有参数自适应功能、算法简单易行、参数估计易收敛、鲁棒性强、稳态性能优良等优点,在电机无传感器控制领域得到了广泛的应用[6-8]。本文首先介绍了模型参考自适应系统控制理论,然后根据电机同步旋转坐标系下的电流方程推导出了参考模型和可调模型,再利用Popov超稳定性理论设计自适应律对转子转速和位置的进行估计,最后基于MATLAB/Simulink和AMESim 软件搭建了IPMSM矢量控制系统联合仿真模型并进行仿真分析,验证了该方法的可行性。
1 模型参考自适应系统控制原理
MRAS从结构上可以分为参考模型、可调模型和自适应律三部分。MRAS的辨识思想是将不含有未知参量的表达式作为参考模型,而将含有待辨识参数的表达式作为可调模型,而且两个模型的输出量必须具有相同的物理意义,然后利用两个模型的输出量之差,设计合适的自适应律来保证系统输出渐进稳定,从而实现对电机参数的准确辨识。MRAS的基本控制结构如图1 所示。其中,u为控制器的输入,x和x赞分别为参考模型和可调模型的状态矢量。
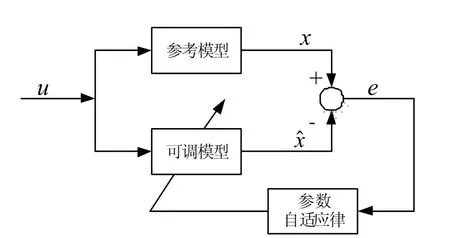
图1 MRAS 的基本控制结构图
2 参考模型和可调模型的确定
对于内置式PMSM,同步旋转坐标系下的电流方程为:

式中:ud、uq分别为定子电压的d-q 轴电压分量,V;id、iq分别为定子电流的d-q 轴电流分量,A;R 为定子电阻,Ω;Ld、Lq分别为d-q轴电感分量,H;ωe为电角速度,rad/s;Ψf为永磁体磁链,Wb。
为了获得可调模型,将式(1)变换为:

由于状态矩阵A,A赞中都包含有转子速度信息,因此可将式(5)作为可调模型,ωe作为待辨识的可调参数,将式(1)作为参考模型。
3 参考自适应律的设计
定义广义误差e=i'-i赞',将式(5)和式(3)相减,可得:

根据式(9)可以得到一个标准反馈系统,如图2 所示,矩阵C是一个线性补偿器。由图2 可得V-Ce。
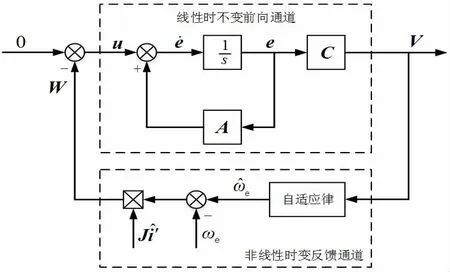
图2 等效非线性反馈系统结构图
根据Popov超稳定性理论可知,若使该系统渐进稳定,必须满足如下两个条件:
(1)线性时不变前向通道的传递函数矩阵G(s)=C(sI-A)-1为严格正实矩阵;
(2)非线性时变反馈通道满足Popov积分不等式:
4 联合仿真分析
为了验证文中所提的估算方法的可行性,在MATLAB/Simulink和AMESim环境中搭建了IPMSM矢量控制系统的联合仿真模型,如图3 所示。电机矢量控制方法采用最大转矩电流比弱磁的控制方法。电机仿真参数为定子电阻R=0.8Ω,d 轴电感Ld=1.74mH,q 轴电感Lq=1.74mH,极对数P=3,永磁体磁链Ψf=0.322Wb,转动惯量J=0.02kg·m2,阻尼系数B=3.035×10-5N·s·m-1。
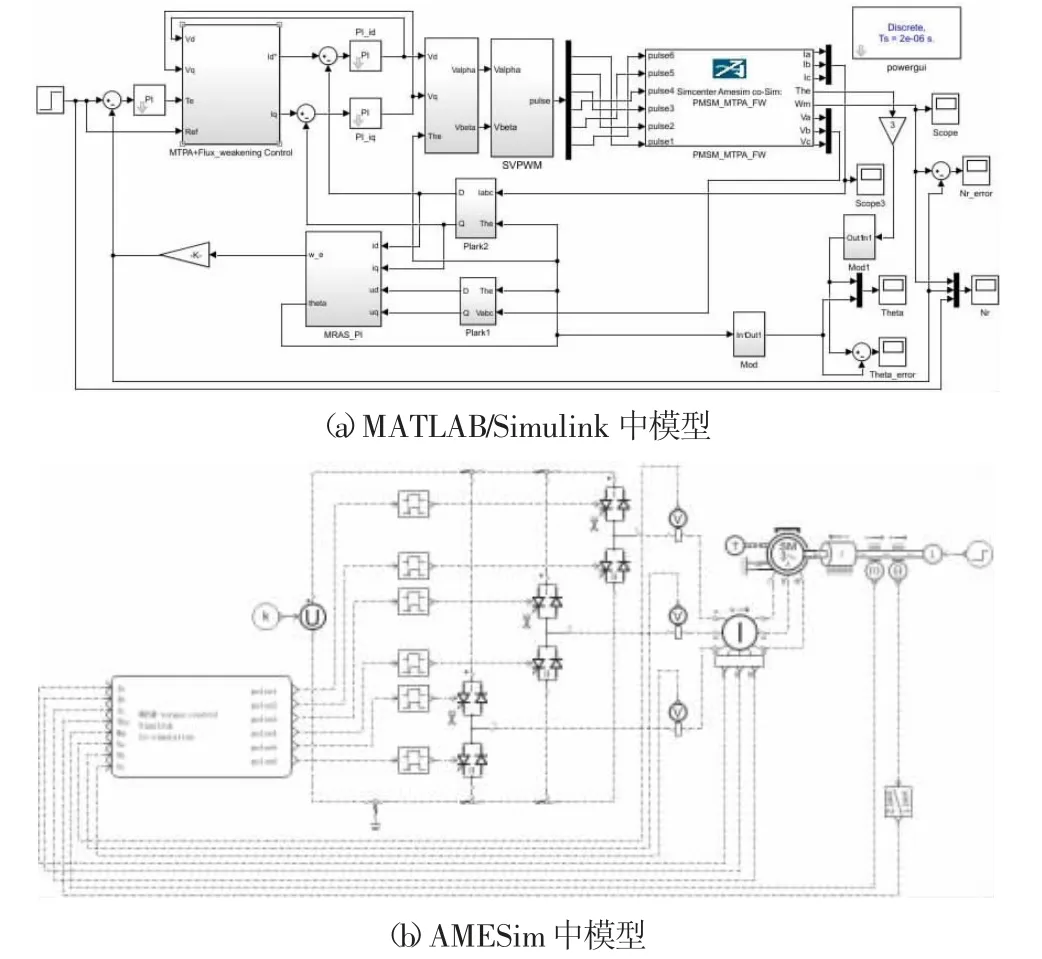
图3 IPMSM矢量控制系统的联合仿真模型
电机带2N.m 负载启动,启动时的参考转速为1000r/min,在t=0.5s 时,转速发生突变,变为2000r/min,图4 为电机启动及转速突变时的实际转速、估计转速及其转速误差仿真波形;图5 为电机启动及转速突变时的实际转子位置、估计转子位置及其转子位置误差仿真波形。
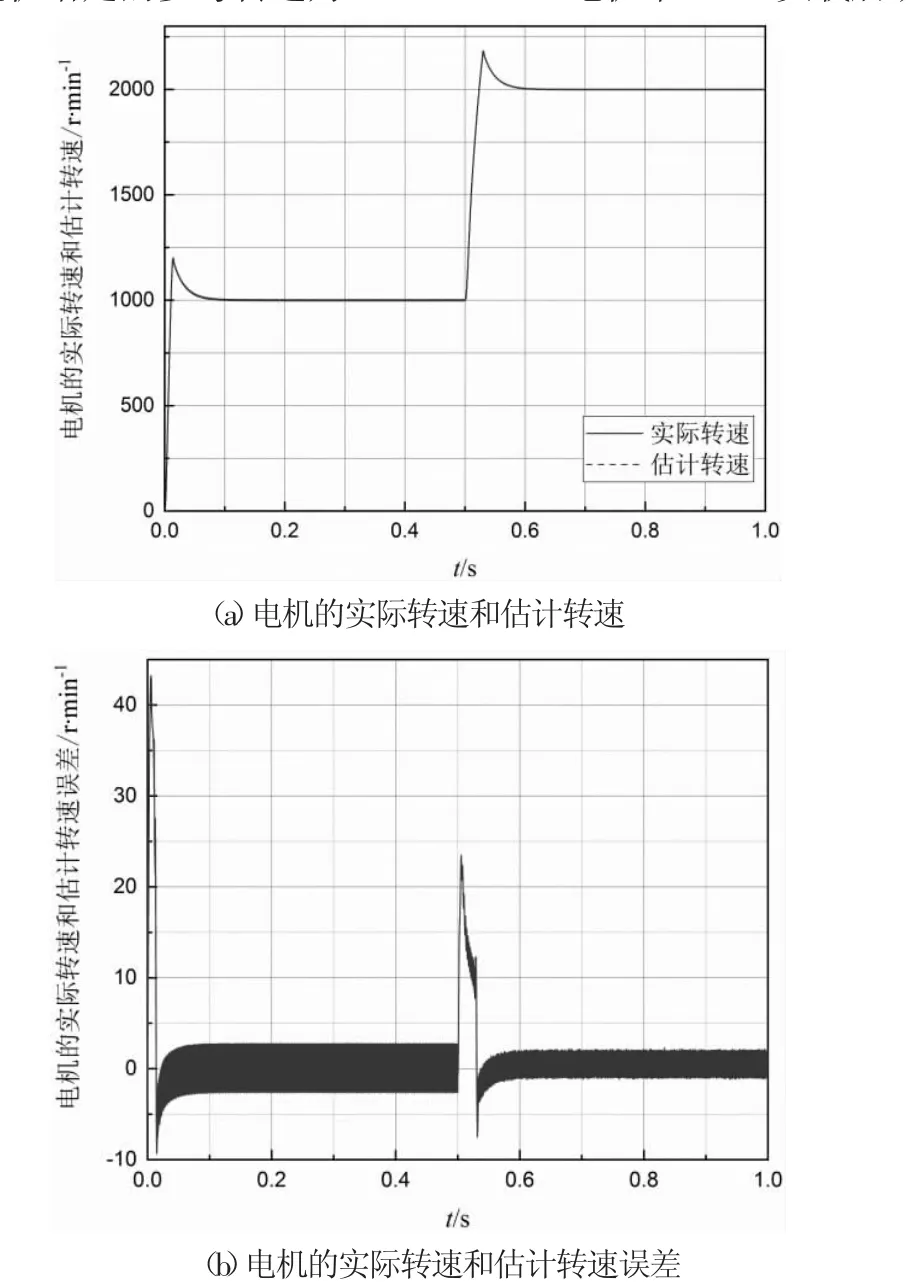
图4 电机启动及转速突变时的实际转速、估计转速及其转速误差仿真波形
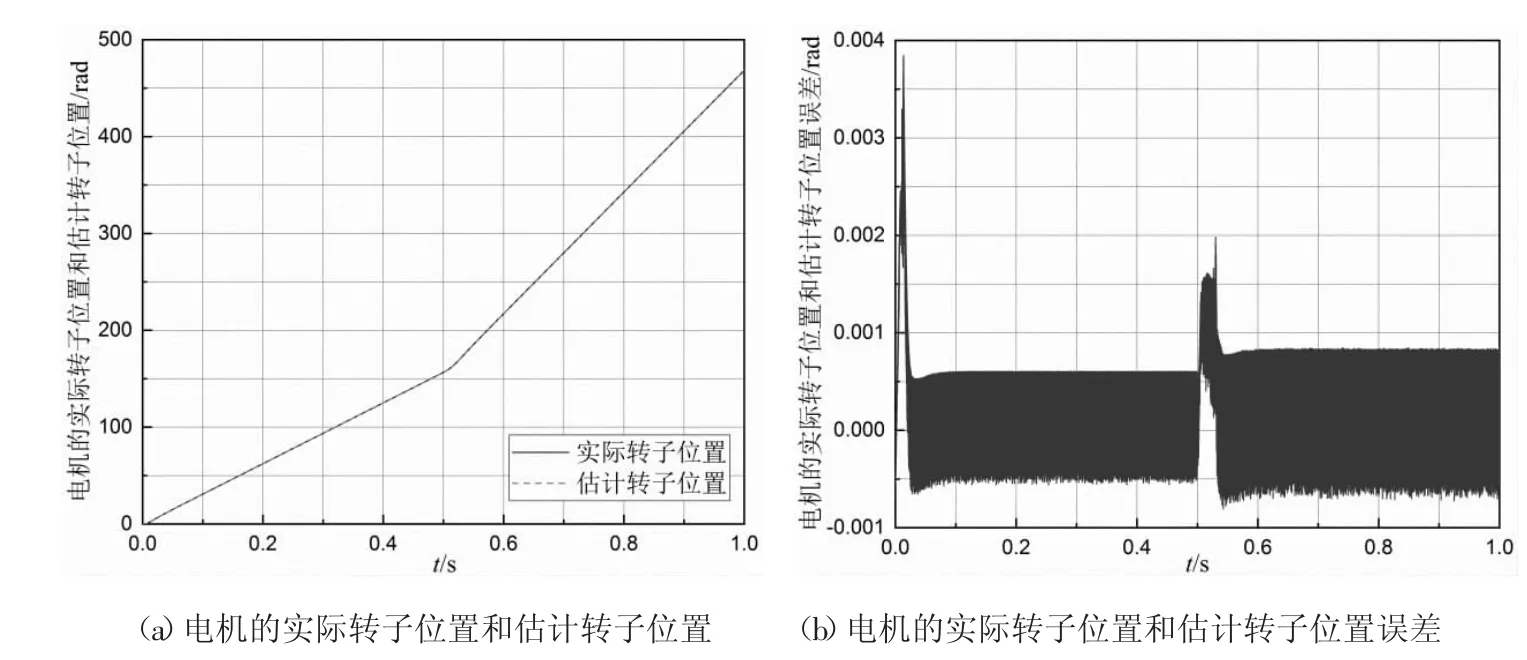
图5 电机启动及转速突变时的实际转子位置、估计转子位置及其转子位置误差仿真波形
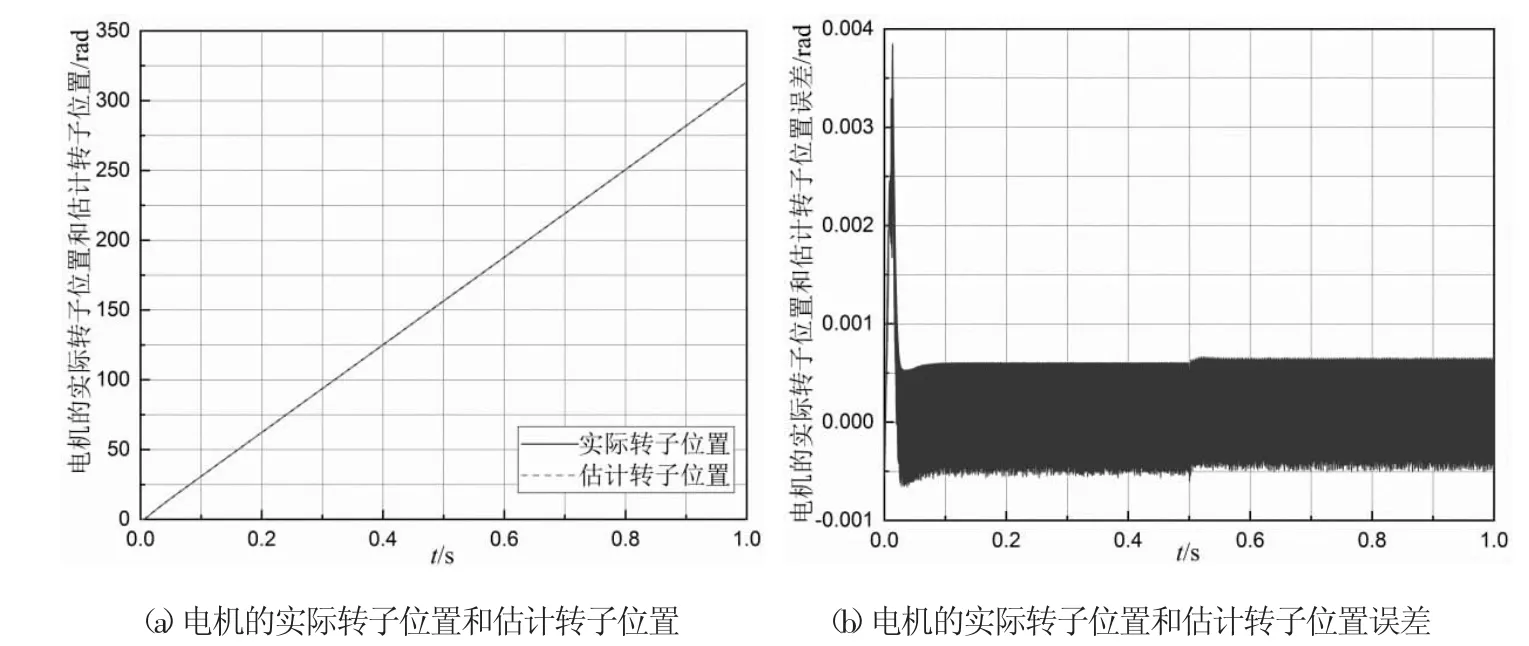
图7 电机负载转矩突变时的实际转子位置、估计转子位置及其转子位置误差仿真波形
电机给定的参考转速为1000r/min,让电机带2N.m负载启动,在t=0.5s 时,负载转矩发生突变,变为50N.m,图6 为电机负载转矩突变时的实际转速、估计转速及其转速误差仿真波形;图7 为电机负载转矩突变时的实际转子位置、估计转子位置及其转子位置误差仿真波形。
由图4、5 可以看出,在电机启动阶段,电机转速能够在0.06s左右跟踪上参考转速,然后趋于稳定。在这个阶段,实际转速和估计转速的误差最大为43r/min,实际转子位置和估计转子位置的误差最大为0.0038rad。在0.5s 将电机参考转速由1000r/min 突变为2000r/min,由图4、5 可以看出,电机转速同样能够在0.06s 左右跟踪上参考转速,然后趋于稳定,在转速突变阶段,实际转速和估计转速的误差最大为24r/min,实际转子位置和估计转子位置的误差最大为0.002rad。在电机启动及转速突变阶段,电机的估计转速和位置都能够很好的收敛于实际转速和位置,估算精度都能够很好的满足电机控制性能的要求,电机动态性能良好。在0.5s 将电机负载转矩由2N.m突变为50N.m,由图6、7 可以看出,电机转速有微小波动,但能够在0.02s 左右快速跟踪上参考转速,然后趋于稳定,在转矩突变阶段,实际转速和估计转速的误差最大为8r/min,实际转子位置和估计转子位置的误差最大为0.0006rad。在电机转矩突变阶段,电机的转速变化很小,未对电机控制系统造成明显影响,电机稳态性能良好。因此,文中所提出的估计方法始终能对电机的转速和位置进行比较准确的估计,完全能够满足对电机控制性能的要求,证明了该方法的可行性。
5 结论
本文根据模型参考自适应系统控制理论,将电机本身作为参考模型,将含有转速变量的d-q 轴电流方程作为可调模型,然后利用波波夫(Popov)超稳定性理论设计合适的自适应律来实现对转子转速和位置的准确估计,并且基于MATLAB/Simulink 和AMESim软件搭建了IPMSM矢量控制系统仿真模型并进行联合仿真分析,仿真结果表明:该方法能够在电机启动、转速和负载转矩突变的情况下对转子转速和位置进行比较准确的估计,动态和稳态性能良好,鲁棒性强,实现了对IPMSM的无速度传感器预测控制,证明了该方法的可行性,为机电液耦合器的进一步研究奠定了基础。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
四川冶金(2018年1期)2018-09-25 02:39:26
军事运筹与系统工程(2016年3期)2016-09-26 11:41:04
电脑知识与技术(2016年10期)2016-06-16 19:27:57
现代防御技术(2016年1期)2016-06-01 12:13:28
通信电源技术(2016年1期)2016-04-16 04:57:26
新高考·高一物理(2016年1期)2016-03-05 22:47:39
电机与控制应用(2015年3期)2015-03-01 03:49:59
锻压装备与制造技术(2013年1期)2013-06-29 02:26:28
出版与印刷(2013年3期)2013-01-31 03:26:11
