
基于特征的古建筑点云自动融合方法
2021-05-25 10:24:32赖超
科学技术创新 2021年11期
赖 超
(1、北京建筑大学 测绘与城市空间信息学院,北京100044 2、北京北建大科技有限公司,北京100044)
1 概述
近年来,随着光学非接触式测量技术与三维激光扫描仪的迅速发展,丰富了数据获取途径。除了非接触式的采集数据方式,三维激光测量设备一站扫描可以获取到仪器为中心十几米甚至上百米半径的区域内的三维表面数据,具有扫描速度快、扫描精确、能准确量测被测物体真实大小等的优点。在点云数据的配准方面,有不少相关的研究,其中最经典的点云数据配准方法为ICP,但是该方法属于局部最优配准,受制于点云数据的初始状态,但是真实场景往往点云位置任意,经典方法无法解决。
2 方法介绍
迭代最近点(Iterative Closest Point, ICP)[1]是经典的数据配准方法,算法核心为最小化目标函数,通过在点云重叠区域内搜索最近点对,迭代计算除最优匹配参数。
后续有相关研究对此进行了优化,Han 等[2]通过将点云分解至多个部分进行分开配准,再根据一致性准则求解各个子部分的统一刚性变换,这种方法可以解决重叠度低的问题,但是该方法通过使用迭代最近点算法使得处理数据量较大的点云,尤其是含噪声数据时计算效率低,收敛速度慢。Yang 等[3]提出了一种全局优化的Go-ICP 方法,该方法建立在ICP 的基础之上,这种基于全局优化的ICP 方法通过找到点云之间的配准测量度量函数的全局最小值,但是增加了时间消耗,比局部最优方法耗时更久。Zhou 等[4]采用FPFH 特征描述子提出一种简单快速的匹配准则(FGR),并通过线过程与稳健估计的方法求解点云刚性配准的问题,这种方法收敛速度快,允许有错误匹配的特征点对,且适用于大规模点云配准,但是未考虑不同尺度点云的配准问题。通过对ICP 方法进行改进,提出了一种局部最优的各向同性尺度与迭代搜索最近点相结合的Scale-ICP[5]方法,这种方法能适用于不同尺度点云数据,由于对点云的初始位置有一定的要求,可以作为精配准的方法。
本文以古建筑激光点云扫描缺失修复作为起点,将三维激光扫描仪点云数据与三维重建点云数据进行融合。考虑到不同来源的点云数据之间的尺度差异,提出一种全局优化的不同尺度异源点云数据自动融合方法,能够用于激光点云数据与影像重建点云的自动融合。采用点云特征计算方式,也有助于解决融合的效率问题。
3 古建筑点云数据自动融合流程
本文采取的古建筑点云自动融合方法的流程图如图1 所示:

图1 算法流程图
3.1 点云特征提取
快速点特征直方图(Fast Point Feature Histograms, FPFH)是点云中常用的一种特征描述符,主要强调描述性,且没有采用绝对距离度量描述点与其邻域内的性质,所以对于不同尺度点云数据不敏感。本文通过对点云提取FPFH 特征对点云进行描述。
3.2 点云特征匹配与筛选
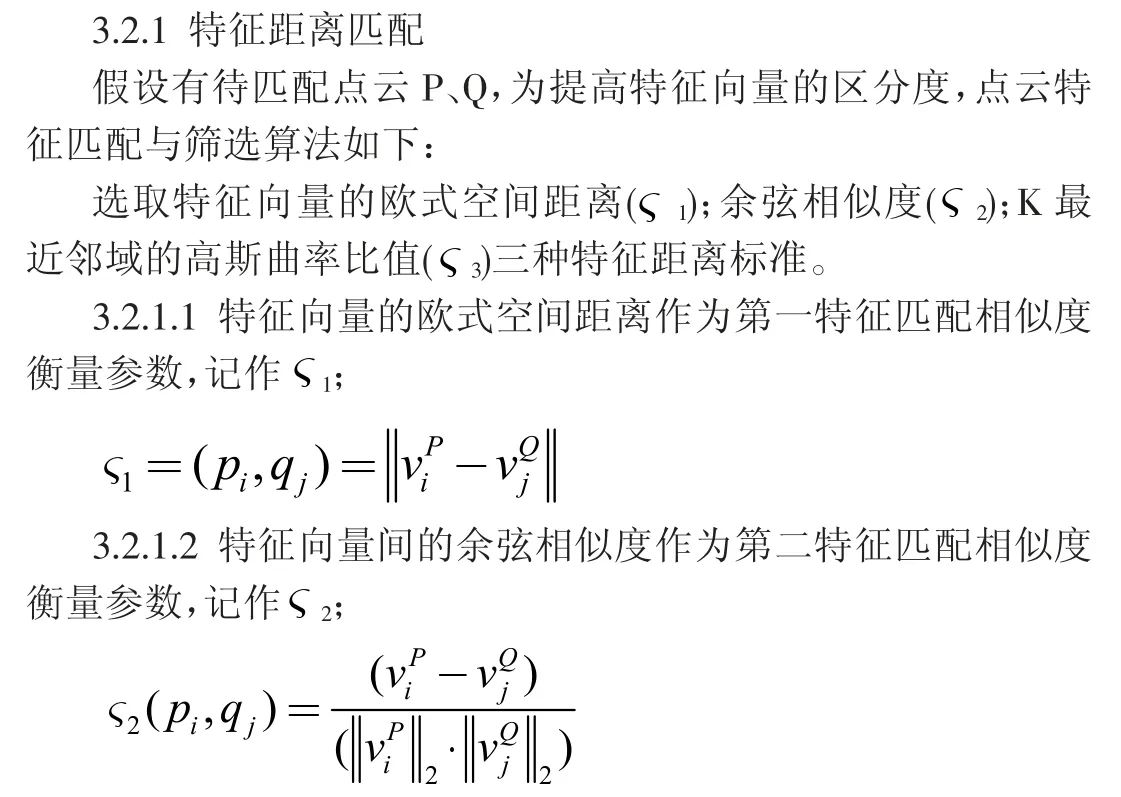

3.2.2 几何规则筛选
本文选取的点云特征不具有尺度不变性,为保证点云特征匹配的正确率,采用几何结合的方式对误匹配进一步筛除。

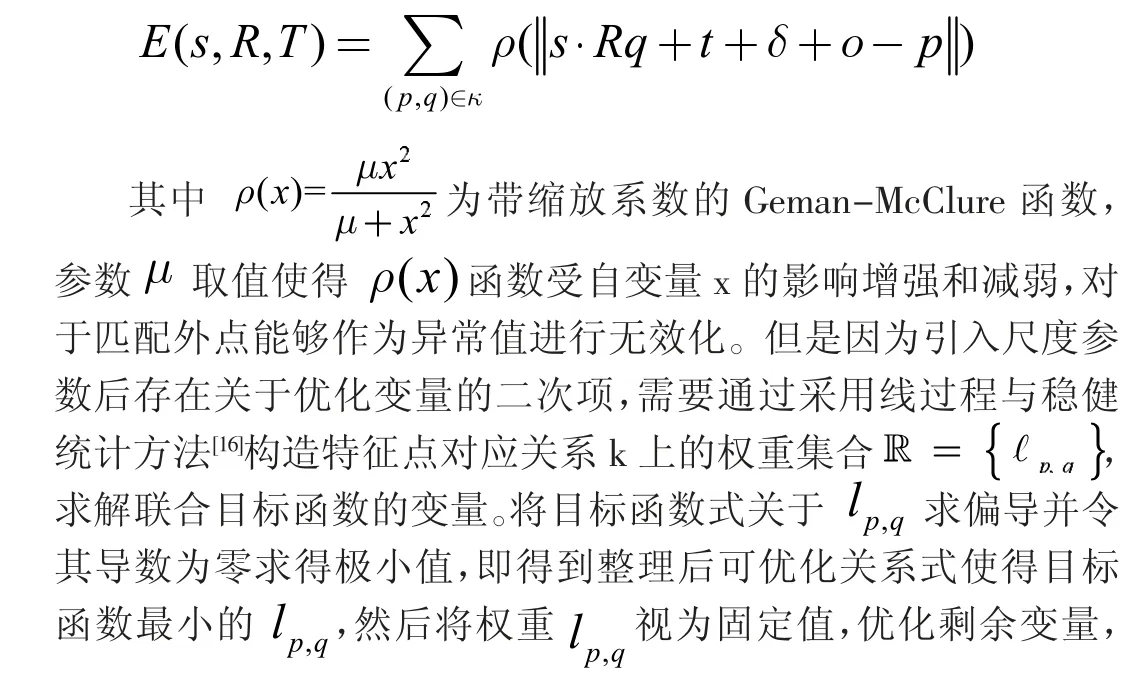
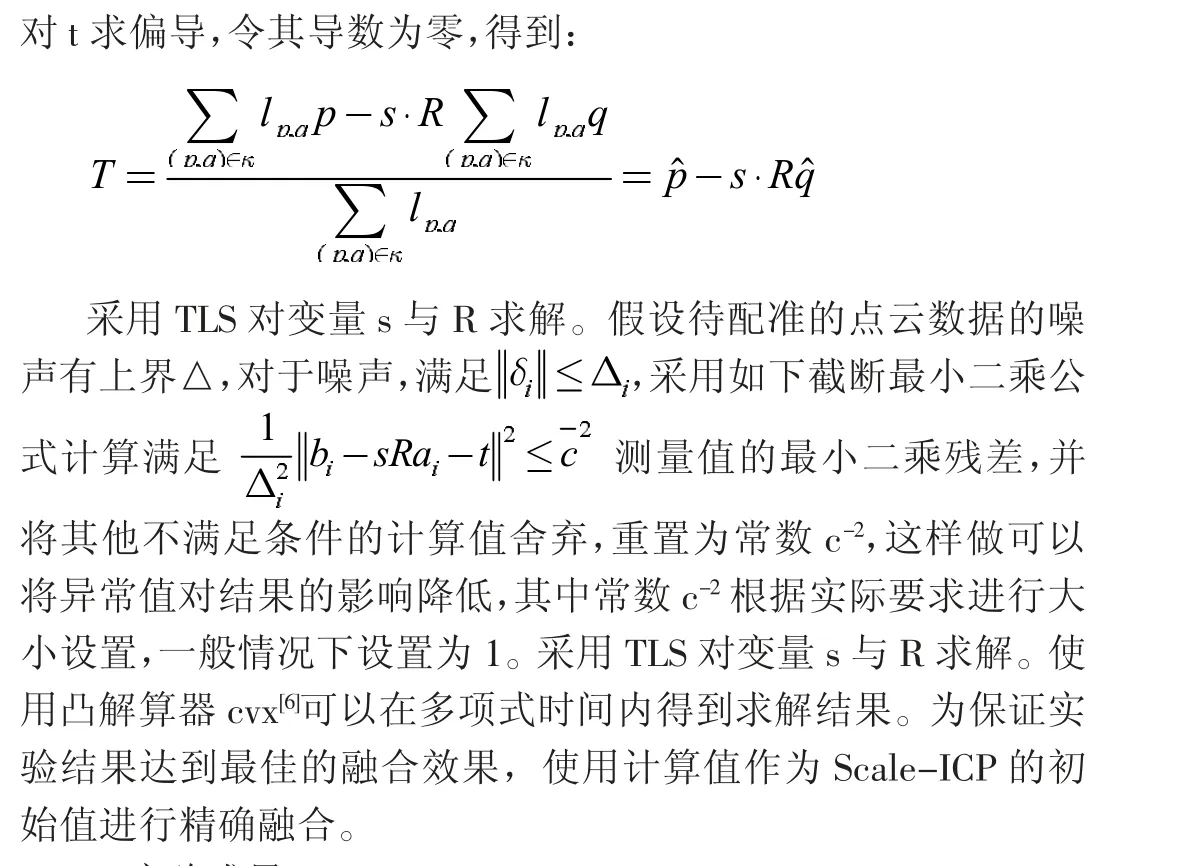
3.3 全局目标函数优化
求解过程通过全局目标函数求解点云变换中的分量。
4 实验成果
点云重叠度的大小决定了待融合的点云数据之间能计算得到的特征匹配点对数量,从而决定了最终融合的效果。

图2 古建筑融合结果
假设完整的重建点云与完整的激光点云之间重叠度视为100%,定义重建点云裁剪后的数据量与原重建点云数据量比值作为点云重叠度。当重叠度大于等于25%的时候,两种异质数据能正确融合,数据之间没有产生分层,融合效果较好。当重叠度约为15%时,由于亭子的四角特征相似,描述单独一个角的点云数据作为待匹配点云在特征匹配计算的过程中伴随有了大量的误匹配使得最终无法正确的融合。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:07:12
数学物理学报(2022年2期)2022-04-26 14:08:04
北京大学学报(自然科学版)(2021年3期)2021-07-16 07:13:40
东北师大学报(自然科学版)(2021年1期)2021-03-27 01:22:14
电脑爱好者(2020年19期)2020-10-20 06:02:06
学生天地(2020年31期)2020-06-01 02:32:16
电子制作(2019年13期)2020-01-14 03:15:18
视野(2018年18期)2018-09-26 02:47:52
金桥(2018年4期)2018-09-26 02:24:54
文物季刊(2017年1期)2017-02-10 13:51:01
