一种基于可变传动比的齿轮齿条式半主动惯容性能研究*
2021-05-24 08:50:50胡银龙熊思杰花天阳
机电工程 2021年5期
胡银龙,熊思杰,花天阳
(河海大学 能源与电气学院,江苏 南京 211100)
0 引 言
惯容是剑桥大学SMITH教授提出的一种新型双端点机械元件,满足两端受力与两端相对加速度成正比的特点[1]1651。惯容的提出完善了力-电流的类比关系,是一种可与电容直接类比的机械元件,其应用已经被证实可提升车辆悬架系统[2,3]、减振隔振系统[4-6]、振动能量采集系统[7]等多类机械系统的性能。
在物理实现方面,多种惯容的实现方式被提出,包括齿轮齿条惯容[1]1650、滚珠丝杆惯容[8]、液体惯容[9,10]等。
半主动惯容是一种惯容量可在线调节的惯容,是传统无源惯容在半主动系统中推广的结果。文献[11]11225提出了半主动惯容的概念,并分析了其对车辆悬架系统性能的影响;文献[12]295给出了在传统无源惯容基础上实现半主动惯容的两个基本思路,即在线调节传动比和在线调节飞轮转动惯量,并分析了基于在线调节飞轮转动惯量的半主动惯容;文献[13]提出了采用CVT的方式改变传动比的半主动惯容。
本文在传统齿轮齿条惯容基础上,提出一种可变传动比的齿轮齿条半主动惯容,并对该装置进行动力学特性分析和基于SolidWorks的运动仿真分析。
1 齿轮齿条惯容
1.1 惯容的定义
惯容的符号表示如图1所示[1]1651。

图1 惯容的符号表示
其动力学方程如下式所示:
(1)
式中:υ1,υ2—两端在等大反向受力下两端各自的速度,m/s;υ—两端的相对速度,υ=υ2-υ1,m/s;F—两端所受的等大反向的力,N;b—惯容量,kg。
1.2 半主动惯容
半主动惯容是一种惯容量可在线调节的惯容,即式(1)中的比例系数b可进行在线调节[11]11227。目前惯容和半主动惯容已有多种实现方式,详细介绍请见文献[14]。
本文所提出的半主动惯容装置是基于文献[1]1650中的齿轮齿条惯容,主要是通过将齿条的直线运动转化为飞轮的旋转运动来实现惯容效果。其主要原理是将惯性较小的直线运动转化为惯性较大的旋转运动。
对于齿轮齿条惯容,其惯容量通常可化为下式:
b=β2·J
(2)
式中:β—由齿轮齿条半径决定的传动比;J—飞轮转动惯量。
文献[12]295指出,实现半主动惯容的两个基本思路是:(1)使装置的传动比能够在线调节;(2)使飞轮的转动惯量能够在线调节。
文献[12]296给出了基于后者的实现方法,本文则提出一种可通过调整传动比的半主动惯容装置。
2 传动比可调的半主动惯容装置
本文所提出的半主动惯容机械结构如图2所示[15]。
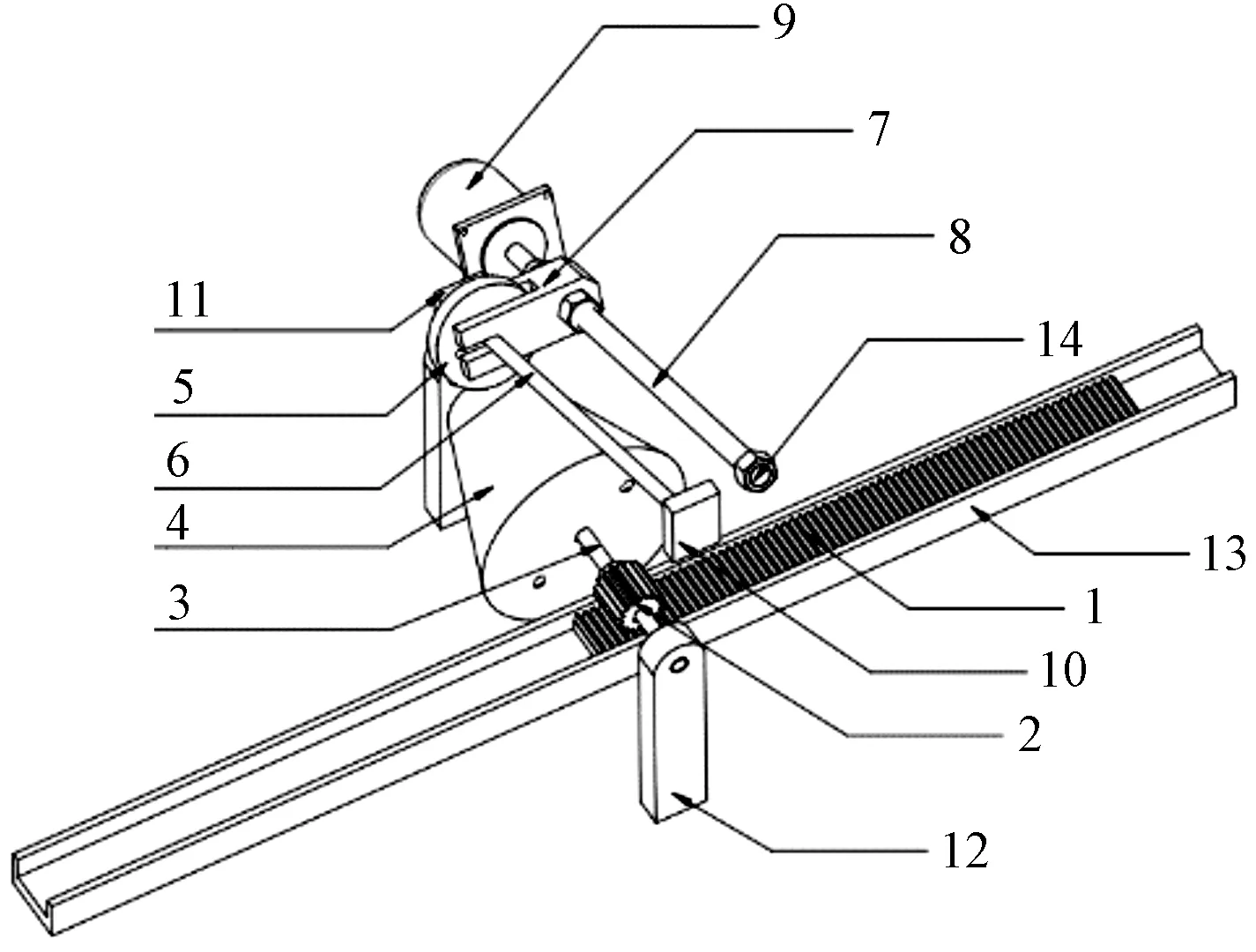
图2 一种传动比可调的半主动惯容装置1—齿条;2—齿轮;3—传动轴;4—锥形圆筒;5—飞轮;6—飞轮滑动轴;7—电动凹槽;8—电动凹槽滑动杆;9—电机;10,11—截止块;12—固定支架;13—齿条滑动槽;14—电动凹槽限位块
该装置通过齿有效啮合,将齿条的水平运动转化为齿轮的旋转运动,齿轮通过传动轴与锥形圆筒相连,锥形圆筒与飞轮相接触,飞轮与飞轮滑动轴相连,并且通过电动凹槽与电动凹槽滑动杆相连,电动凹槽通过电机驱动沿电动凹槽滑动杆移动,电动凹槽能够有效卡住飞轮,进而调节飞轮在飞轮滑动轴上的位置。当飞轮与锥形圆筒侧面不同位置相接触时,就改变了惯容装置的传动比。
该装置的主要实现原理是:当圆盘转动时,圆盘上不同半径的同心圆在相同角速度下,具有不同的线速度。现将不同半径的同心圆组合成一个锥形圆筒,当锥形圆筒侧面与飞轮在不同位置接触时,则相当于调节了整个装置的传动比,进而在线调节了装置的惯容量。
改变传动比的示意图如图3所示。
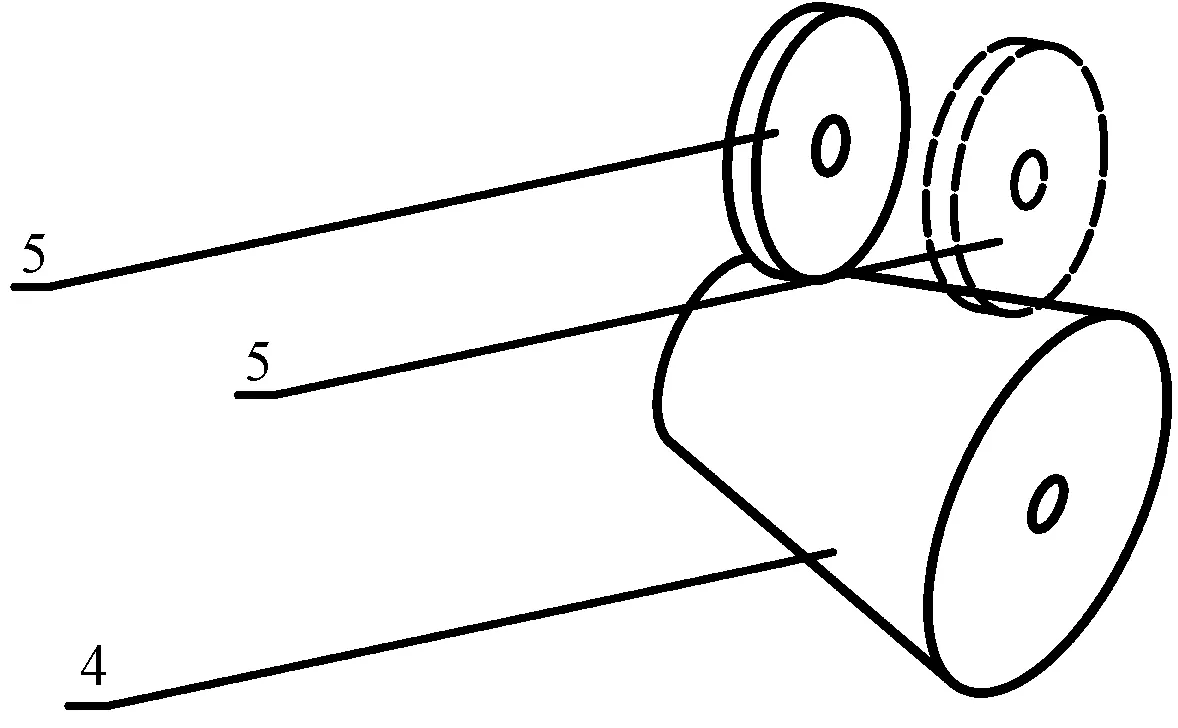
图3 改变传动比示意图
图3中,虚线的飞轮表示飞轮移动后的位置,实线飞轮表示飞轮移动前的位置。飞轮不同位置处锥形圆筒的半径不同,因此其传动比是不同的。
3 半主动惯容的性能分析
本节对图2所示的半主动惯容装置的动力学特性以及设计中的问题进行分析。
3.1 动力学特性分析
将齿条的直线运动记为u(t),齿轮的半径记为Rg,齿轮和锥形圆筒的角位移记为θ(t),飞轮半径记为Rf。同时,设电机位置关于惯容量的表达式为g(b),则当与飞轮接触时,锥形圆筒侧面半径为R(g(b))。设固定支架提供的力为Ft(t),作用于齿条上的力为F(t)。
进行受力分析可知,整个装置(固定支架)在齿条受力时并未发生移动。根据牛顿定律可以得到:
Ft(t)+F(t)=0
(3)
由直线位移转化为旋转位移的物理关系如下式所示:
(4)
锥形圆筒各横截面的质量与锥形圆筒各横截面转动惯量的表达式如下:
(5)
(6)
式中:mi—锥形圆筒各横截面的质量;Ii—锥形圆筒各横截面转动惯量;ζ—锥形圆筒的面密度;Ri—齿轮的外半径。
记锥形圆筒各处半径Ri等效至齿条端的力为Fi(t),则有下式:
(7)
记锥形圆筒存在的各种力等效至齿条端的等效力为Fc(t),可得下式:
(8)
式中:Rmax,Rmin—锥形圆筒截面最大和最小半径。
记齿轮等效到齿条端的力为Fg(t),则有下式:
(9)
式中:mg—齿轮质量。
将锥形圆筒截面与飞轮接触时的半径看作齿轮的外半径,且飞轮受力等效至齿条端的等效力为Ff(t),飞轮质量为mf,可得下式:
(10)
最后,可得到作用在齿条上的作用力的表达式如下:

(11)
对比式(1)可以得到该装置的惯容量b满足下式:
(12)
由式(1,12)可知:若忽略电机带动飞轮移动的渐变过程,在齿条端和固定支架端施加等大反向作用力时,该装置符合惯容的定义。同时,R(g(b))是电机根据需求惯容量调节飞轮与锥形圆筒接触半径的一个函数关系,其大小是可以根据需求惯容量而改变的,从而形成一种传动比可变、惯容量可在线调节的半主动惯容装置。
值得注意的是:在上述分析过程中,忽略了飞轮移动的动态过程,未考虑调整飞轮位置所带来的阻尼项,因此式(12)只能作为一种近似值。
3.2 性能分析

同理,也正是因为四次项的存在,锥形圆筒的上下底面半径在实际设计过程中是受限的。上、下底面半径过大的差值将使得锥形圆筒存储大部分能量。在较大半径差的情况下,该装置可能不具备惯容量在线调节的能力。
在理想条件下,飞轮与锥形圆筒较大半径横截面接触时,整个装置将随R(g(b))的增大存储更多的惯性能量。
进一步对齿轮齿条传动装置进行动力学分析可得[16]:
(13)
设该装置齿条质量为m,将式(11)代入式(13)中,可以得到该装置对振动的抑制系数表达式为[17]:
(14)
在理想条件下,可进一步得到惯容量和抑制系数的表达式:
(15)
因为对振动ug(t)的抑制系数δ是始终大于1的,抑制系数δ主要通过削弱ug(t)的幅值,来起到抑制振动的效果。当在理想条件下,根据式(15)可知,惯容量和抑制系数主要受到R(g(b))的影响而改变,而R(g(b))是能够通过电机进行调节,进而达到合理范围内的目标惯容量b。
由此可知,在实现惯容在线调节的同时,该装置具有惯容装置的一般减振用途。
4 仿真分析
4.1 仿真模型及其参数
本文利用SolidWorks搭建了半主动惯容仿真模型,如图4所示。

图4 基于SolidWorks的半主动惯容仿真模型
笔者所做的仿真实验主要包括3个部分:
(1)设置线性马达参数以5 s为变化周期,探究齿条的运动状态;(2)设置旋转马达参数以5 s为变化周期,探究飞轮的运动状态;(3)改变电机的位置以及锥形圆筒的参数,探究其对能量存储的影响。
仿真中使用的主要参数如表1所示。

表1 仿真中使用的主要参数
SolidWorks中旋转马达参数设置(位移-时间)如表2所示。
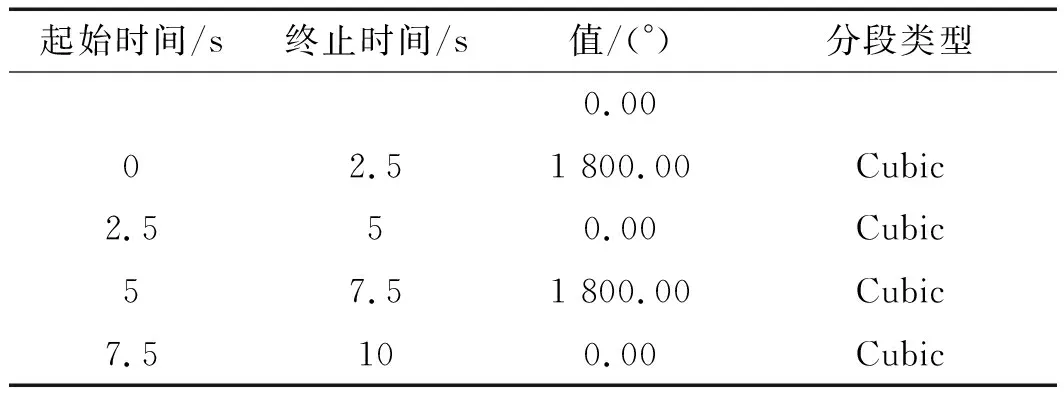
表2 SolidWorks中旋转马达参数设置(位移-时间)
SolidWorks中线性马达参数设置(位移-时间)如表3所示。
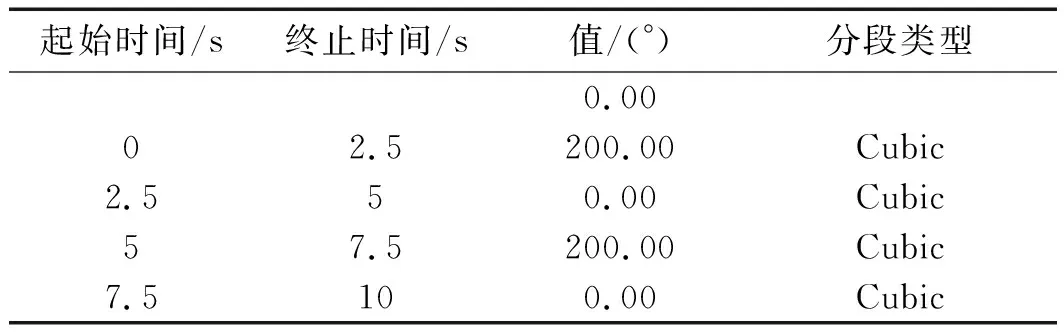
表3 SolidWorks中线性马达参数设置(位移-时间)
4.2 仿真结果及分析
对上述SolidWorks进行运动图解,可以得到齿条线性加速度、速度、位移的图解,如图5所示。

图5 齿条线性加速度、速度、位移图解
线性马达速度设置为10×104mm/s,从图5可以观察到一个合理的现象:齿条的速度小于线性马达速度的设定值。这主要是由于施加在齿条上的力还需要驱动后续的齿轮、锥形圆筒、飞轮等。
图5也表明:齿条并未受到明显的反作用力,呈现为一种周期性的较为平整的运动状态;在不考虑飞轮沿滑动轴运动的反作用影响时,该装置可以视为一类齿轮齿条传动装置。
进一步对飞轮的运动进行图解,可以得到飞轮角加速度、角速度、角位移的图解,如图6所示。

图6 飞轮角加速度、角速度、角位移图解
在仿真时,本文并未对旋转马达的设置寻一个关于R(g(b))严谨的运动调节关系Grotate(R(g(b))),仅按照表1所示设置了一个周期运动,使得飞轮可沿锥形圆筒侧面进行周期为5 s的往复运动。由于飞轮的机械运动量受到旋转马达、齿条传动、沿飞轮滑动轴移动的非线性摩擦等影响,飞轮的运动显得比较复杂。
从飞轮角加速度图解可知:飞轮在0~1.25 s沿着飞轮滑动轴向锥形圆筒较大底面运动,导致传动比呈下降趋势,且线性马达的加速度此阶段设置为减小趋势,所以飞轮的角加速度不平稳地不断减小。但在此期间,当飞轮滑动至锥形圆筒中点附近截面时,由于旋转马达和线性马达的配置在此时达到最优配置,使得飞轮角加速度突然加大,达到一个小峰值;
在1.25 s~2.5 s期间,线性马达加速度反向增大,虽然飞轮仍然向锥形圆筒较大底面运动,线性马达增大的加速度促使飞轮的角加速度呈轻微的上升趋势;
在2.5 s~3.75 s期间,线性马达的加速度反向增大,但飞轮开始沿着飞轮滑动轴向锥形圆筒较小底面运动,从图解来看,线性马达的加速度影响起着明显的主导作用,使飞轮角加速度呈减小趋势;在此期间,与0~1.25 s期间类似,飞轮行至中点截面附近,飞轮的角加速度出现了较大突变;
在3.75 s~5 s期间,线性马达加速度再次换向增大,而飞轮继续朝较小底面运动,传动比呈增大趋势,飞轮的角加速度也呈现增大趋势。
从飞轮的角速度和角位移图解可知:飞轮在0~2.5 s期间角速度方向未发生改变,在每个飞轮转动周期内角位移不断增大;但在2.5 s~5 s期间,飞轮角速度开始反向,在每个飞轮转动周期内角位移不断减小,这是飞轮沿飞轮滑动轴往复运动的结果。
综合以上分析可知,齿条传动或线性马达对飞轮运动的影响大于电动凹槽对飞轮运动的影响,且该装置的传动比可以通过电机进行在线调节,只是本文并未寻找到具体的控制关系,但改变该途径被证明是可行的。
进一步地,本文将对能量存储问题进行探讨,通过对飞轮和锥形圆筒存储的能量进行图解,可以得到锥形圆筒和飞轮储能对比图,如图7所示。

图7 锥形圆筒和飞轮储能对比图
从图7可知:在此次仿真中,锥形圆筒存储的能量是时刻大于飞轮的。结合3.2的分析,这是由于仿真中锥形圆筒材质密度选取不当或上下底半径Rmax和Rmin设置不当造成的。
综合能量分析可知,在实际设计中,锥形圆筒的材料密度及上下底面限制应当被仔细地考虑,以避免调节失效的问题。
5 结束语
本文提出了一种通过在线调节传动比实现在线调节惯容量的齿轮齿条半主动惯容装置;通过对该装置进行数学分析验证了装置的惯容属性;探讨了该装置在实际设计中应当注意锥形圆筒材料密度、上下底面半径的选取等问题;建立了基于SolidWorks的仿真模型,分析了齿条和飞轮的运动状态和能量存储问题。
研究结果表明:本文提出的装置满足惯容特性,具备惯容量调节功能;齿条传动或线性马达对飞轮运动的影响大于电动凹槽对飞轮运动的影响;锥形圆筒材料密度以及上下底面半径对能量存储有较大影响,电机的位置调节影响较小。
猜你喜欢
机械设计与制造(2021年7期)2021-07-26 03:11:34
装备制造技术(2020年11期)2021-01-26 00:38:58
水运工程(2020年2期)2020-02-26 06:28:38
物流技术与应用(2019年6期)2019-07-16 08:14:52
潍坊学院学报(2017年2期)2017-04-20 08:44:17
水利科技与经济(2016年7期)2016-04-25 13:03:04
重型机械(2016年1期)2016-03-01 03:42:07
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
湖南大学学报·自然科学版(2014年2期)2014-12-25 14:06:15
石家庄理工职业学院学术研究(2014年4期)2014-04-27 14:14:40