自适应滑模增益永磁同步电机无速度传感器控制
2021-05-23 11:39:16胡智宏叶晨光申永鹏郑竹风杨小亮
微特电机 2021年4期
胡智宏,叶晨光,申永鹏,郑竹风,李 波,杨小亮
(1.郑州轻工业大学 电气信息工程学院,郑州450002;2.河南赫行新能源汽车运营有限公司,新乡453000)
0 引 言
近年来,精密仪器和电动汽车的快速发展,促进了永磁同步电机在高精度控制以及高效率领域的应用[1⁃2]。
传统的永磁同步电机控制系统,通过机械传感器检测电机的转子位置和转速信息[3⁃4],这会增加电机控制系统的成本费用以及电机装配的尺寸和质量,并对使用环境有严格的要求。针对上述缺点,无速度传感器控制技术具有效率高、可靠性好以及适应环境能力强等优点,因而无速度传感器控制技术有很大的发展前景[5⁃11]。
滑模观测器控制是最为常见的一种控制策略,它的控制过程是非连续性的,并且有较强的鲁棒性[12⁃13]。文献[14]提出一种具有在线实时补偿功能的控制策略,采用高频信号注入法,减小由于电机控制系统中一些因素产生信号延时而造成的相位偏差,从而提高转子位置观测精度。文献[15]在永磁同步电机矢量控制系统中,利用分段指数函数具有饱和特性以及变化稳定的特点,代替传统滑模观测器中的Sigmoid开关切换函数,从而改善控制系统中由于高频信号引起的抖振问题,并提高电机控制的稳定性。文献[16]设计一种基于终端电压平均值的线反电动势滑模观测器,该滑模观测器通过构建一种具有边界层的饱和函数以及结合幂次趋近律,对PWM占空比与相电流进行采样分析,从而计算出终端电压的平均值,实现滑模控制。但是,上述文献中在自适应滑模增益对抖振以及观测精度的影响方面涉及不足,限制了滑模观测器无速度传感器控制系统的稳定性和精准度。
本文设计一种自适应滑模增益的永磁同步电机无速度传感器控制策略,将相电流有效值动态反馈至自适应滑模增益观测器中,利用饱和函数代替传统的开关切换函数,并设计滑模增益自适应率,优化滑模控制,有效地改善了传统滑模观测器存在的抖动现象,进一步提高观测精度。最后通过仿真和实验验证,可实现自适应滑模增益永磁同步电机无速度传感器控制。
1 自适应滑模增益观测器设计
1.1 永磁同步电机数学模型
图1为永磁同步电机在三种坐标系下的数学模型。

图1 永磁同步电机三种坐标系模型
根据图1建立永磁同步电机数学模型:

式中:iα,iβ为α,β轴上的定子电流分量;uα,uβ为α,β轴上的定子电压分量;R,L为定子电阻与电感;eα,eβ为α,β轴上的反电动势分量;ψα,ψβ为α,β轴上的定子磁链分量;ωr为电机转子角速度;φ为电机转子位置信息。
1.2 滑模观测器设计
在传统滑模观测器中,开关时间存在滞后现象,控制作用会被延迟一段时间,系统存在抖振现象;并且在传统滑模控制系统中电机转子位置和转速不能实现很好的跟踪性能。为了解决上述问题,本文在传统滑模观测器的基础上,将自适应增益因子和饱和函数反馈至定子电流观测器中,判断测量电流和观测电流的差值大小,并通过自适应增益因子来校正测量电流和观测电流的差值,使其逐渐接近于零。自适应滑模增益观测器可表示:

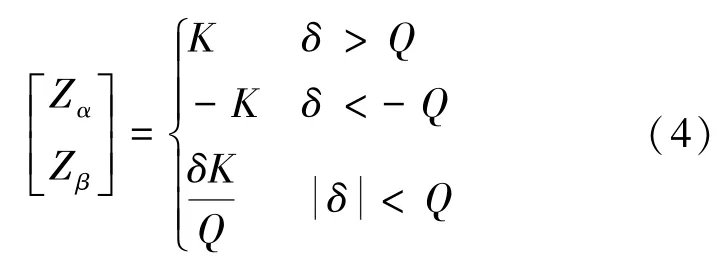
式中:δ为滑模观测器的误差值,即需要定义的滑模面函数。式中:K为滑模观测器的增益因子;Q为饱和函数的边界层厚度。

当校正因子取饱和函数的线性区域时,误差最小,因此式(4)也可简化为式(5)。
在传统滑模观测器中,一般采用传统的开关切换函数,但是它存在不连续性的开关控制量,从而加剧了滑模抖振的现象。为了改善此问题,本文构建具有边界层厚度的饱和函数,如图2所示。

图2 饱和函数曲线
通过以上建立的自适应滑模增益观测器模型可知,影响观测器滑模面的因素主要是测量电流与观测电流之间的误差值,通过调节滑模观测器的自适应增益因子改善误差值的大小,使其滑模面尽可能趋于平滑,从而有效地抑制抖振现象。
1.3 滑模增益的自适应率
当永磁同步电机采用滑模观测器控制运行时,观测电流和测量电流之间存在一定的真实误差。为了克服该控制系统中存在的电流误差,引入滑模自适应增益因子,利用电流误差驱动自适应控制结构,得出滑模增益自适应率,使电流误差随着自适应率变化而变化。
从本质上看,恒定的边界层厚度是导致饱和函数性能不佳的根本原因,必须寻求一个连续可变的自适应系数来控制函数的变化。控制函数在不断变化时,它与横坐标轴之间存在一个接近角,是系统运动轨迹与切换面之间的夹角。夹角越小,系统越接近切换面,从而实现收敛控制,使边界层厚度变小。因此,将接近角作为函数变化的自适应系数,构造出饱和函数。

通过计算测量电流的有效值,在实验中进行分析和验证,找出电流有效值、电流误差值和自适应因子之间存在的内在关系,得出滑模增益自适应率,从而有效降低控制系统中电流存在的误差量。在仿真采样周期内有效电流的计算公式如下:式中:j为数据样本指数;p为周期循环次数;M为滤波后同步信号定义的周期中采样数;Mp为循环数中采样点的个数;m为起始采样点指数;mp为循环次数的起始采样点指数;N为周期数(由选定的同步源信号定义);I^p为每个周期内的电流有效值;I^为整个周期数内的电流有效值。
根据上述公式,在仿真过程中使永磁同步电机在不同的工况下运行,从而求出不同工况下的相电流有效值I^。
结合以上描述以及式(6)、式(7)的计算结果,通过理论计算以及数据分析,得出滑模增益自适应率,可表示:

式中:r为函数关系式的自适应率系数。利用电流误差值δ和电流有效值I^之间存在的变化关系,确定系数r的值,使自适应率一直控制在固定范围内,从而有效克服测量电流与观测电流之间的误差,使整个滑模控制系统处于稳定精准的观测状态。自适应滑模增益观测器控制框图如图3所示。

图3 自适应滑模增益观测器控制框图
综上所述,可得到基于自适应滑模增益观测器的永磁同步电机矢量控制系统结构框图,如图4所示。
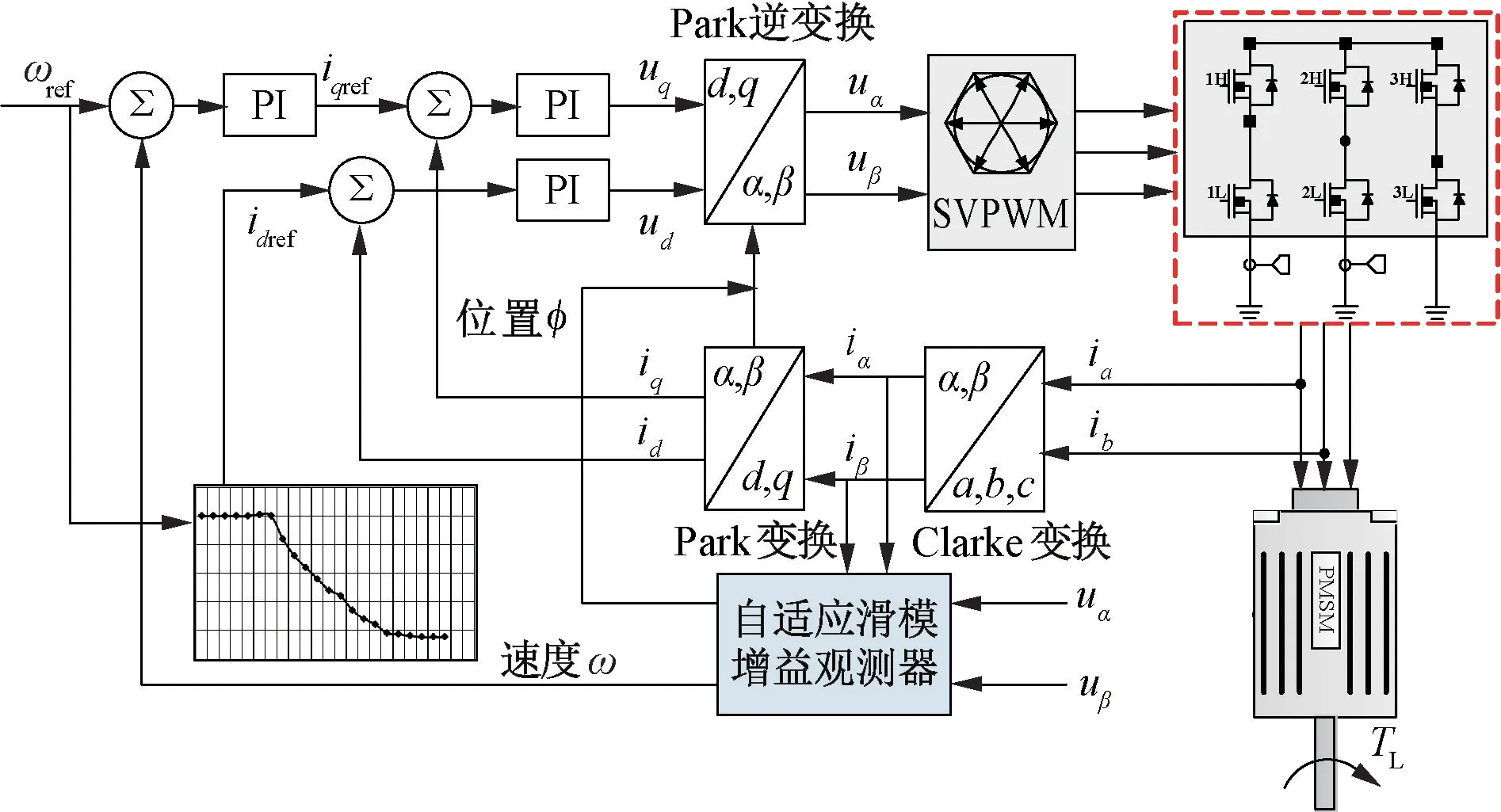
图4 永磁同步电机矢量控制系统结构框图
1.4 离散化处理
基于上述模型控制系统,为了实现DSP数字控制,离散化处理滑模观测方程。对式(2)、式(5)进行离散化处理,可得:

2 仿真分析及实验验证
为进一步验证本文的自适应滑模增益控制策略的可行性,根据图4中的系统结构,搭建仿真模型和实验平台。永磁同步电机数据参数如表1所示。
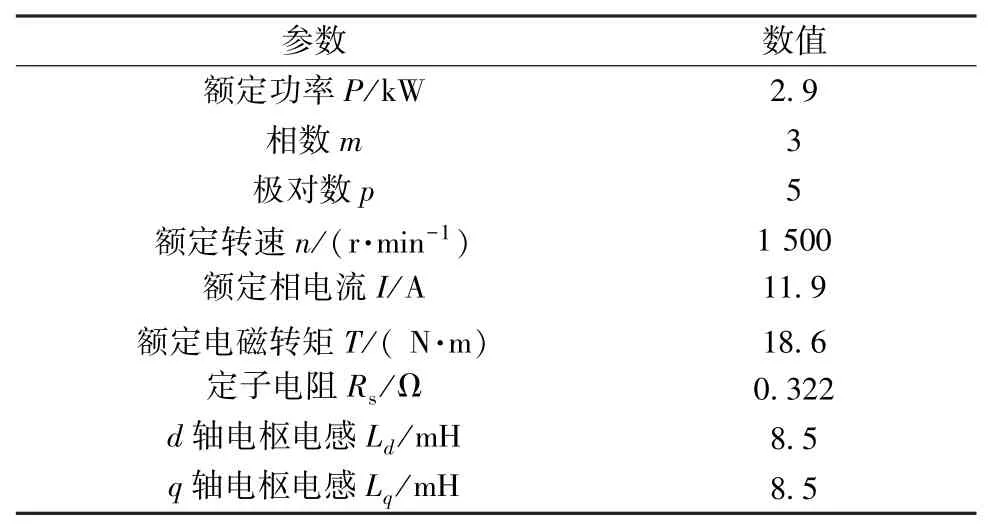
表1 永磁同步电机规格参数
2.1 仿真分析
搭建系统仿真模型,通过理论仿真验证分析本方法的可行性。仿真结果如图5~图8所示。
图5是在1 000 r/min转速下,利用自适应滑模增益观测器和传统滑模观测器得出的A相定子电流波形。由仿真结果可知,在一定的转速下,自适应滑模增益观测器得出的仿真波形存在的抖振幅值较小,有效地削弱了其抖振的存在。
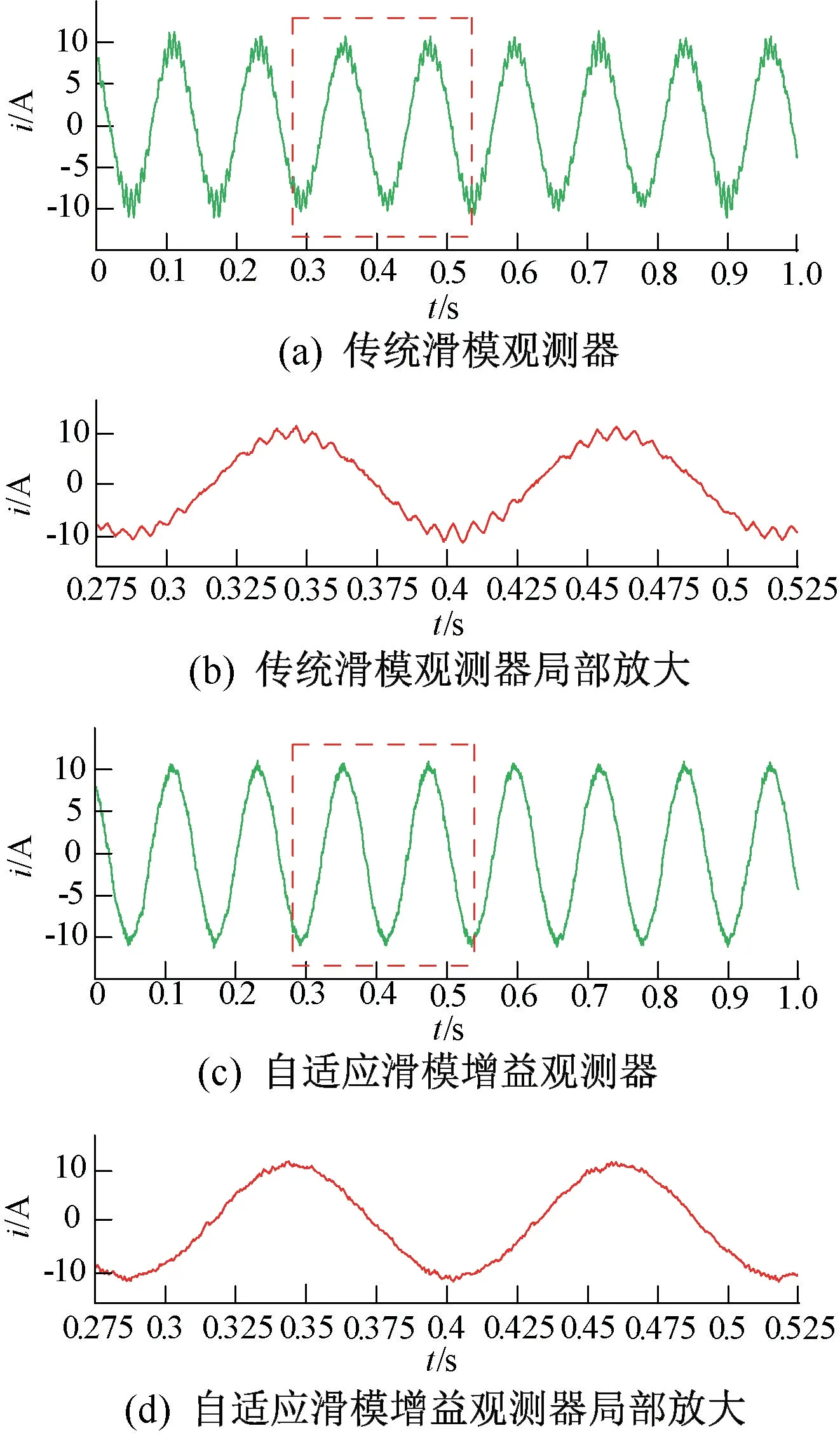
图5 转速1 000 r/min时定子电流波形
图6是在动态转速下,利用自适应滑模增益观测器和传统滑模观测器在稳态时电机转速波形。通过对比可知,传统滑模观测器得到的转速误差至少为9 r/min,即为0.9 rad/s,自适应滑模增益观测器得到的转速误差为6 r/min,即为0.63 rad/s,同时自适应滑模增益观测器得到的转速曲线抖振含量更少,具有更高的观测精度。

图6 动态转速下实际转速与观测转速波形变化
图7、图8为转速在1 000 r/min情况下目标转子位置、观测转子位置以及转子位置误差波形。对

图7 传统滑模观测器的转子位置波形及误差

图8 自适应滑模增益观测器转子位置波形及误差
比发现,传统方法中观测转子位置抖振幅值和转子位置误差较大,自适应滑模增益控制策略有效地改善了观测精度,削弱了抖振幅值并减小了转子位置误差,具有良好的动态性能。
2.2 实验验证
在实验过程中,首先,利用5对极表贴式永磁同步电机作为驱动电机,并带有2 500线旋转增量式编码器。其次,通过一台2.9 kW额定功率的变频异步电机提供负载。利用汇川公司的MD500变频器对负载电机进行转矩控制。电机驱动控制器中的PWM逆变器模块的载波频率为10 kHz,通过逆变器电路的作用计算并输出得到A相、B相和C相三相的定子电流,作为观测器的输入,将测量值经过转换电路输出,利用MDA805A电机驱动功率分析仪对波形进行测量。具体部件型号及搭建的实验平台分别如表2和图9所示。
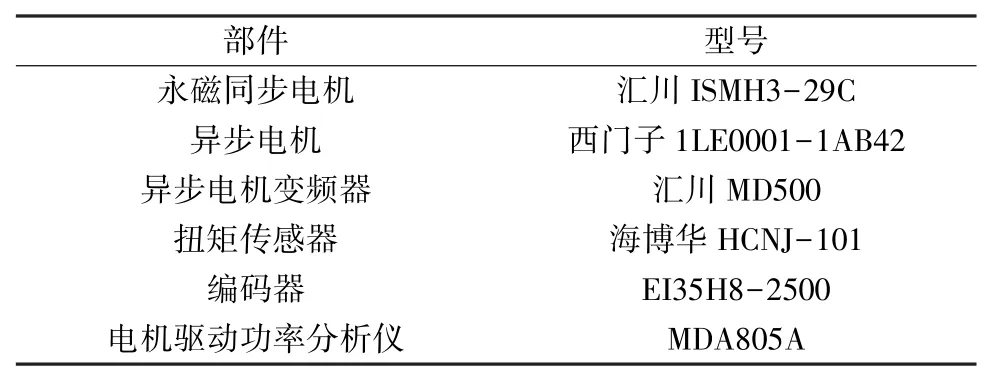
表2 主要部件型号

图9 实验平台
通过实验平台对自适应滑模增益永磁同步电动机无传速度感器控制系统进行了验证,当转速稳定时,采用传统滑模观测器和自适应滑模增益观测器分别测量定子电流、转子位置以及转子速度,实验结果如图10、图11、图12所示。
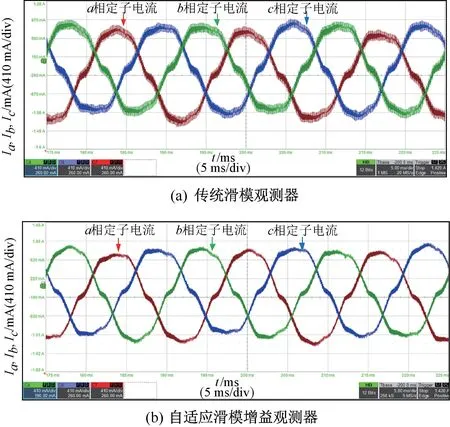
图10 给定转速下三相定子电流波形

图11 动态转速下实际转速与观测转速波形变化
图10是在给定速度下由两种控制策略估算出的三相定子电流波形,传统滑模控制方法得到的定子电流波形存在很大的纹波抖动,而自适应滑模增益观测器估计的定子电流波形中抖动有明显的改善且较平滑。
图11给出电机在稳态条件下分别利用两种控制方法得到的转速波形变化情况。图中表示电机在恒速和变速的状况下运行过程。从图11中可以看出,传统滑模观测器得到的转速波形中有很大的振动,且误差较大,误差至少在2 rad/s。而自适应滑模增益观测器转速波形抖动较小,误差有所改善,误差为1 rad/s。
图12表示电机在稳定转速下通过传统滑模观测器和自适应滑模增益观测器得到的转子位置波形变化以及误差情况。从图12中的波形可知,传统滑模观测器得到的转子位置抖振幅值和转子位置误差较大,响应时间为3.7 ms,误差大小为75°。而自适应滑模增益观测器有效地改善了观测精度,削弱了抖振幅值并减小了转子位置误差,响应时间为2.6 ms,误差大小为63°。
3 结 语
本文提出一种自适应滑模增益永磁同步电机无速度传感器控制方法,将相电流有效值动态反馈至自适应滑模增益观测器中,构建带有边界层的饱和函数,同时采用FOC矢量控制策略,有效改善了自适应滑模增益观测器的抖振问题,进一步提高了控制系统的观测精度,电机的转速误差值得到明显的改善。
通过仿真以及实验验证分析对比可知,引入自适应滑模增益后,控制系统中存在的滑模抖振现象有明显的改善,并具有更高的观测精度。与传统控制策略相比,自适应滑模增益观测器得到的转子速度曲线更加平滑,转速跟踪效果更好,转子位置误差有所改善,抖振含量较少,运行更加稳定。
猜你喜欢
防爆电机(2020年6期)2020-12-14 07:16:54
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
光学精密工程(2016年3期)2016-11-07 09:03:49
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年11期)2014-04-04 09:21:36