水电站高边坡实景三维建模工程应用
2021-05-19 01:24尚海兴柯生学贺春林
西北水电 2021年2期
张 钊,尚海兴,柯生学,邢 文,贺春林
(中国电建集团西北勘测设计研究院有限公司,西安 710065)
0 前 言
建立水电站规划阶段高边坡实景三维倾斜摄影模型不仅能直观反映空间属性[1],也可从不同视角、不同距离了解兴趣区山体裂缝、滑坡体状态,其对水工设计、地质勘测等工作具有一定辅助作用。目前,水电站高边坡三维建模存在落差大、阴影重、像控点难以布设、空中三角测量复杂等技术难题,许多工程师及科研人员通过多种手段解决这些问题。尚海兴、白芝勇提[2-3]使用Phantom4 RTK航摄系统仿地飞行、多角度拍摄方法实现减免地形图测图和建模时的像控点数量,但该方法在高落差、大面积的试验区作业效率低,且短焦镜头也无法适用水电站高边坡;张军等[4]通过对航摄仪进行检校、对焦至无穷远处、建立影像畸变模型等方法纠正部分畸变,但无法大幅度控制镜头畸变,无法解决峡谷两侧光照亮度不同,空中三角测量解算困难的问题。
本文以西藏某项目为例,以水电站坝址区高边坡作为试验区进行航摄并建模,采用五镜头航摄仪配合高精度PPK系统辅助平差,减少像控点数量,同时提高空中三角测量成功率,较常规单镜头相机生产出的三维实景模型纹理更优、漏洞更少。
1 测区概况
1.1 测区概况与试验准备
测区位于西藏某高海拔地区,山体陡峭、树木高大、植被覆盖较厚,是两山夹一河的峡谷地形。试验测区投影面积约为1.5 km2,谷底路面海拔约为3 100.00 m,相对高差最大约为700 m。常规方法布设像控点难度大,仅能沿沟底道路布设少量像控点;植被覆盖厚,常规方案空中三角测量计算易失败;落差大,分辨率难以统一。根据水电站可研阶段勘察设计需求,拟构建倾斜摄影三维实景模型,后期可依托模型采集生产1∶2000地形图和若干水文断面。
2 试验方案
根据GB/T 19294-2003《航空摄影技术设计规范》对航摄分区的要求,分区内地形高差一般不大于1/4相对航高[5]。而测区峡谷中高差大、林木高耸,统一航高会导致谷底分辨率过低或顶部影像重叠度不足,常规固定翼无人机巡航速度快、作业效率高等优势将在峡谷地区受到限制,无固定翼盘旋及转弯条件。综上所述,利用旋翼无人机出转弯灵活、姿态稳定、飞行风险低等优势进行变高仿地飞行保证飞行安全,预设航摄参数辅以五镜头长焦航摄仪保证模型精度及纹理质量。像控工作完成后,采用短焦单镜头Phantom4 RTK设备进行等条件、同参数航摄建模,用于后期进行2种不同设备模型观感对比,此设备及航摄参数不再具体敷述。
2.1 航摄系统情况及优势简介
本套系统使用 KWT-X6L-15六旋翼无人机搭载RB-DG4Pros五镜头航摄仪,该系统相机具有优异的光学性能,可补偿像差且将光学镜头畸变率严格控制到千分之四以内,起到减免像控的作用。因山体高差大,峡谷两侧长期光照不均,存在阴影,常规单镜头相机光线补偿困难,常会出现一景影像两侧亮度反差大的情况,故对航摄时段选择要求较高。本套航摄仪可以设置5个镜头分别自动调节感光度(ISO)及曝光参数(EV)进行曝光补偿,每个镜头单独进行成像,大面积改善阴影区曝光强度,避免模型成果出现“阴阳”差异,影响模型观感。本套航摄系统参数详细信息见表1。
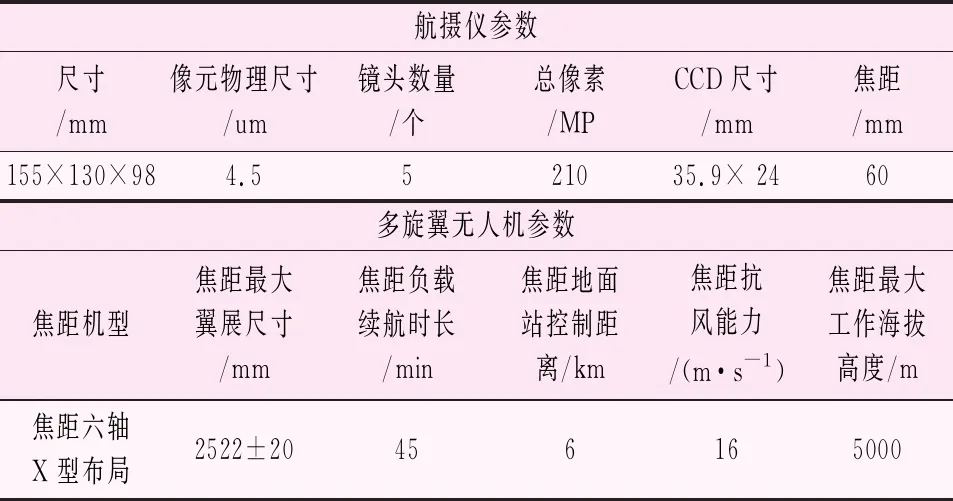
表1 航摄系统参数表
该航摄仪4个侧视镜头分别对应航摄的前后左右4个方向,并与下视镜头成45°夹角。作业时,5个角度的镜头同时进行曝光,并同步记录机载差分数据,用于提升后期空中三角测量计算速度和成功率。随着峡谷山体角度变大,五镜头航摄仪较之单镜头优势明显,可极大提升航摄重叠度和单次曝光摄影范围,前后视角的镜头可以拍摄到下视镜头无法拍摄到的陡峭山壁和倒崖;左右镜头可扩大单航线拍摄范围,获取更多山体侧面纹理,使得模型产品各角度纹理充足,从而减少模型漏洞。此亦有利于后期在模型中准确测制所需要的水文断面,使库区容量计算更加准确。
2.2 航摄方案
因航摄既要保证充足的光照,又要避免因山体陡峭出现过大阴影,故航摄选在中午前后各1 h时段内进行,本时段航摄能最大程度弱化其对航摄质量的影响。
本套设备基于开放的地面站软件系统按高度分层布设航线,进行变高仿地飞行。此操作解决了高边坡地形布设等高航线出现前文提到的问题;测试区具体参数为:下视镜头航摄地面分辨率5 cm,航向重叠度80%,旁向重叠度70%,摄影基线长度48 m,航飞速度设置为8 m/s,转弯模式为定点转弯。本次航飞方案主要特点如下:
(1) 变高飞行
本次测试共敷设12条航线,航线参考Google earth软件中的DEM预留安全高度,自河流左岸逐层过度上升后由右岸逐层下降;峡谷两侧航线相对航高均分为6层,自500~1 000 m每100 m为一层。每条航线高度随摄影基准面变化而变化,航高改变也直接影响航摄分辨率和航摄重叠度,防止出现因陡峭地形导致最高点重叠度不足或最低点分辨率无法满足航摄预设要求的情况。
(2) PPK应用
PPK是利用载波相位进行事后差分处理获取坐标的GNSS 定位技术[6],其无需实时通讯,可应对因峡谷地区信号遮挡严重RTK技术造成的数据断链情况,高精度高频率PPK设备可准确内插出相机曝光点的精准空间位置[7],再配合相机固有夹角提供的3个外方位角元素初始值及5个镜头的相对几何关系,快速定位相邻影像,提高空中三角测量效率。
随航飞速度增加,机载GNSS模块定位会产生线性偏移。本次将航飞预设速度减慢虽降低了部分航摄效率,但提升了差分成果精度。机载差分设备与差分基准站通过相对动态定位获取曝光点坐标,作为区域网平差中的附加摄影测量观测值,再与地面像控点进区域网联合平差,此时地面控制点数量可大幅减少。GNSS辅助空中三角测量的模拟理论[8]认为: GNSS摄站外方位线元素效果优于角元素,且其在区域网联合平差中极其有效,甚至差分坐标代入平差可免除像控点。差分系统与机载差分设备联合平差的理论为:机载GNSS差分设备相位中心与航摄仪投影中心利用像片姿态角φ、ω、κ所构成的正交变换矩阵R可得到如下关系式(1)[9]:
(1)
式中:XA,YA,ZA分别为机载差分系统相位中心大地坐标;XS,YS,ZS分别为航摄仪投影中心大地坐标;u、v、w分别为相位中心在像方坐标系中的3个坐标分量。
若像点a在以像主点为原点的像平面坐标系中的坐标为(x,y) , 机载差分系统相位中心在物方空间坐标系中的地面坐标为(X,Y,Z), 则像平面坐标与物空间坐标理论上应满足投影中心-像点-物点位于一条直线的共线条件方程如式(2)[10]:
(2)
式中:f代表航摄仪主距;a1、a2,…,c3分别为影像外方位角元素表示的方向余弦。
2.3 像控方案
因交通原因,本次实验区无法按照常规方案全区均匀布设像控点,航摄作业前仅在测试区内河边路面上均匀布设9个平高像控点,并进行现场采集坐标。后使用以下方法实测大量检查点,用于建模后对模型精度进行检查评估,像控点、曝光点位置分布见图1。
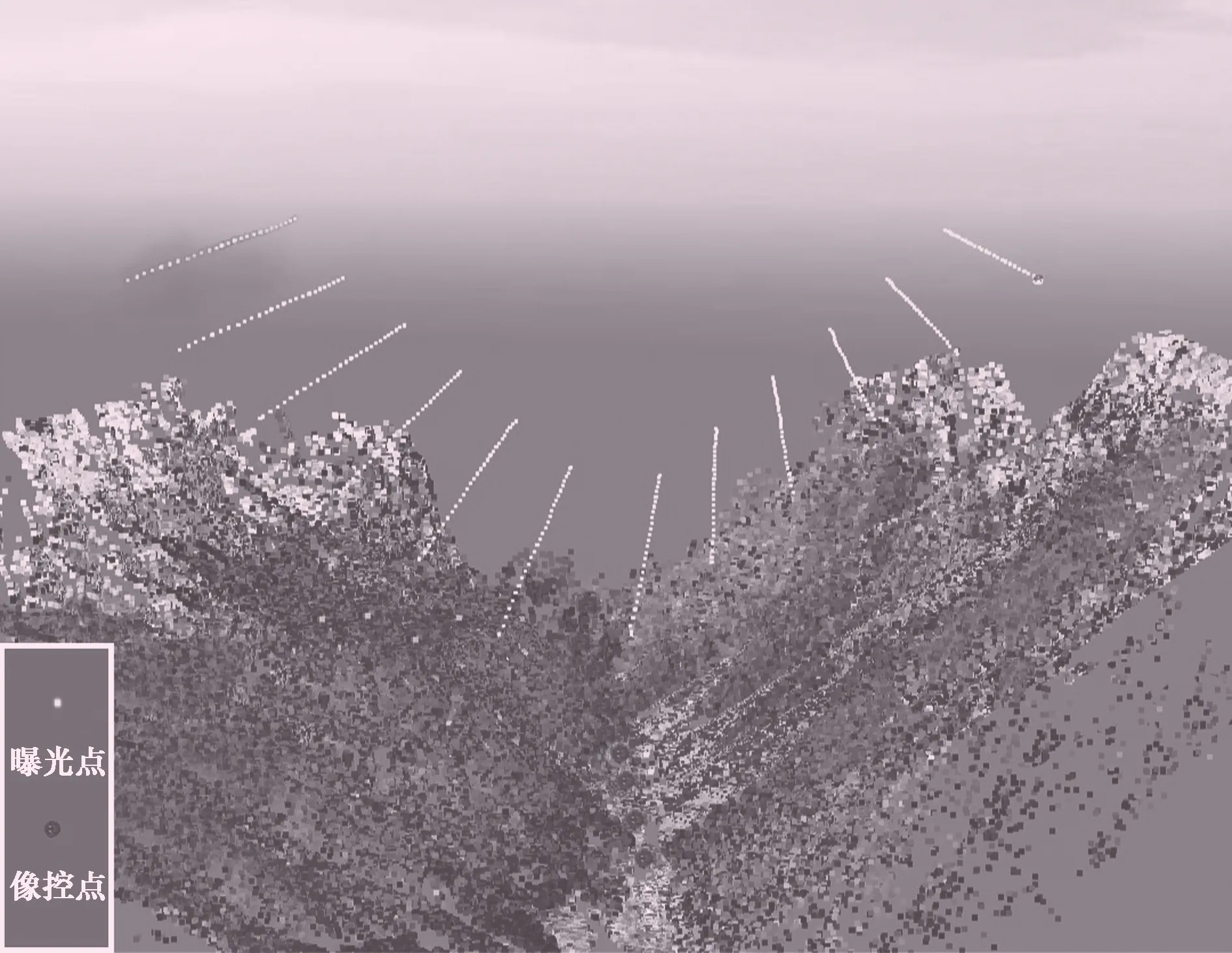
图1 像控点、曝光点位置分布示意图
(1) 沿河道路边远离像控点位置使用GNSS-RTK技术测量若干碎步点;
(2) 使用机载雷达设备对测区进行扫描,滤波稀释后保留若干地面特征点。
2.4 空中三角测量平差及建模方案
航摄完成后使用与该套航摄系统配套的SkyScanner软件剔除非关注区域的侧视影像,减少冗余数据的计算量,然后将所有影像和与之对应PPK计算出的差分位置信息自动结合生成block文件。再将其导入本次空中三角测量计算平差及建模使用的软件中,建模技术路线流程为:数据预处理→block文件导入→航摄仪参数导入→坐标系统定义→空中三角测量参数设置→自由网空中三角测量→引入像控点→约束网空中三角测量→空中三角测量精度检查→三维模型生产。
在落差大、植被厚的林区进行空中三角测量计算难度大。本次对关键点密度、影像组件构造模式、径向畸变、切向畸变等参数进行自定义设置,从而提升空中三角测量成功率。空中三角测量设置见图2,空中三角测量平差精度表见表2。

图2 空中三角测量图
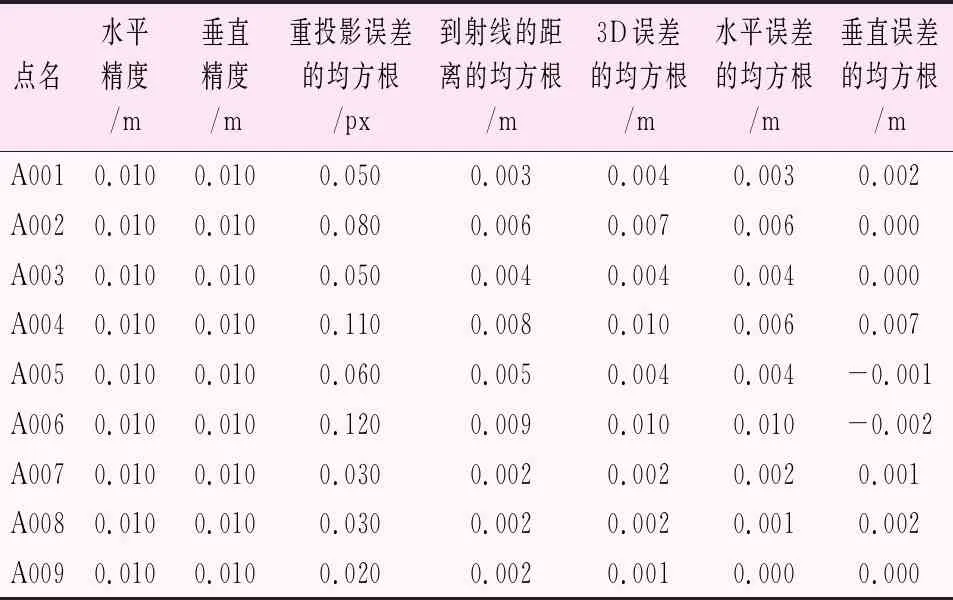
表2 空中三角测量平差精度表
3 精度、纹理检查与分析
3.1 模型观感对比
建模完成后对比发现常规Phantom4 RTK设备建立的模型表面纹理差,树林中细节变形严重、出现漏洞,峡谷两岸出现亮度不均、观感差等情况。而使用本套设备及方案建立的模型纹理清晰、无漏洞,峡谷两岸几乎无亮度差别,颜色均匀,观感良好。单镜头短焦相机与五镜头长焦相机模型细节纹理质量对比图和模型色差及阴影对比见图3、4。

图3 单镜头短焦相机(左)与五镜头长焦相机(右)模型细节纹理质量对比图
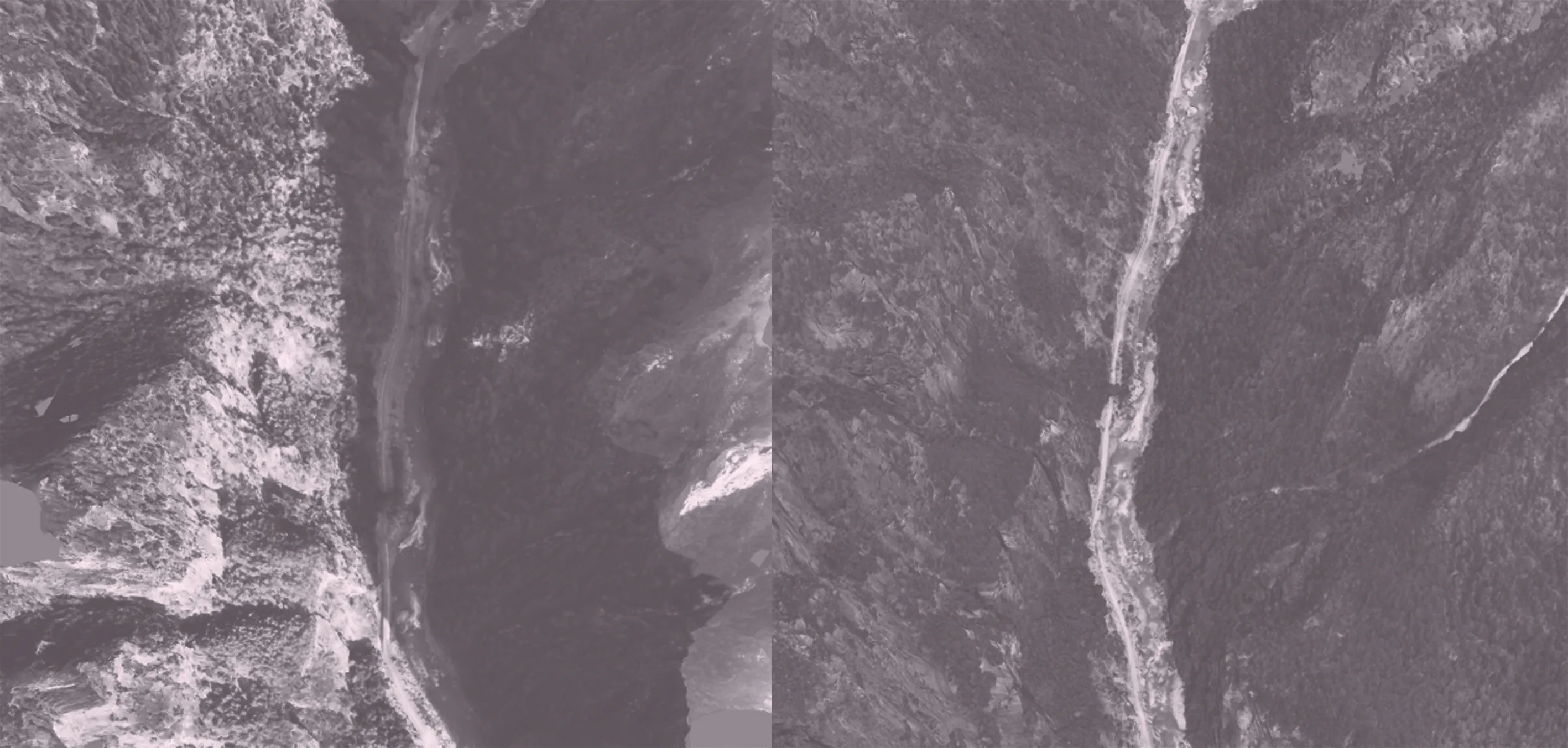
图4 单镜头短焦相机(左)与五镜头长焦相机(右)模型色差及阴影对比图
3.2 精度评定及分析
为了检查本次试验的生产精度,使用上文所述方法预先获取的若干地面检查点野外实测坐标,与其模型采集坐标进行比对并式(3)所示计算中误差,误差公式:
(3)
式中:m为中误差,mm;Δ为真误差,mm;n为观测值个数。
因试验区为流域重点水电站选坝河段,故项目内部控制精度指标高于NB/T 35029-2014《水电工程测量规范》标准。参照NB/T 35029-2014《水电工程测量规范》[11],平面中误差限差按规范中表3.0.5-3中的1∶1000丘陵地成图精度执行,即为0.60 m;高程中误差限差按规范中表3.0.5-4中山地高程中误差执行,即为0.66 m。计算完成后,按照地面检查点与像控点高差每100 m为一类进行分类列表对比。检查点相对像控点高差与精度关系见表3,检查点相对像控点高差与平面中误差关系见图5,检查点相对像控点高差与高程中误差关系见图6。
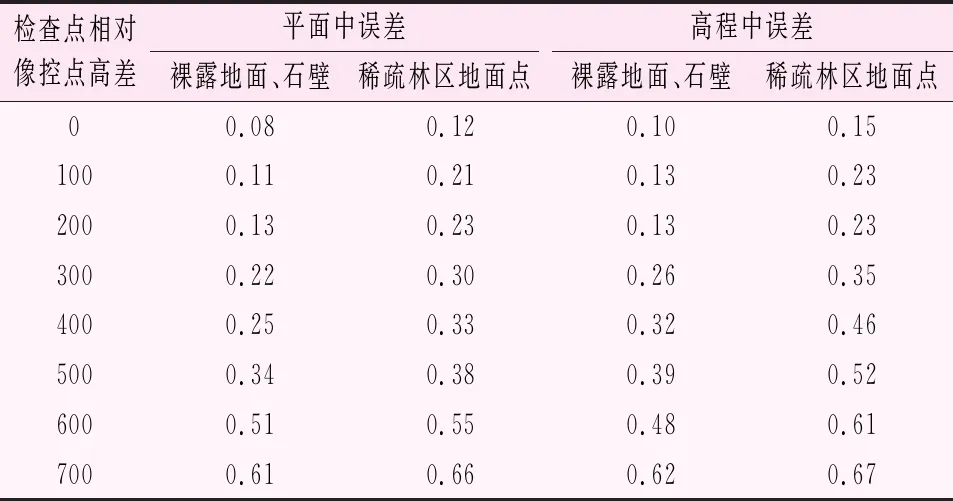
表3 检查点相对像控点高差与精度关系表
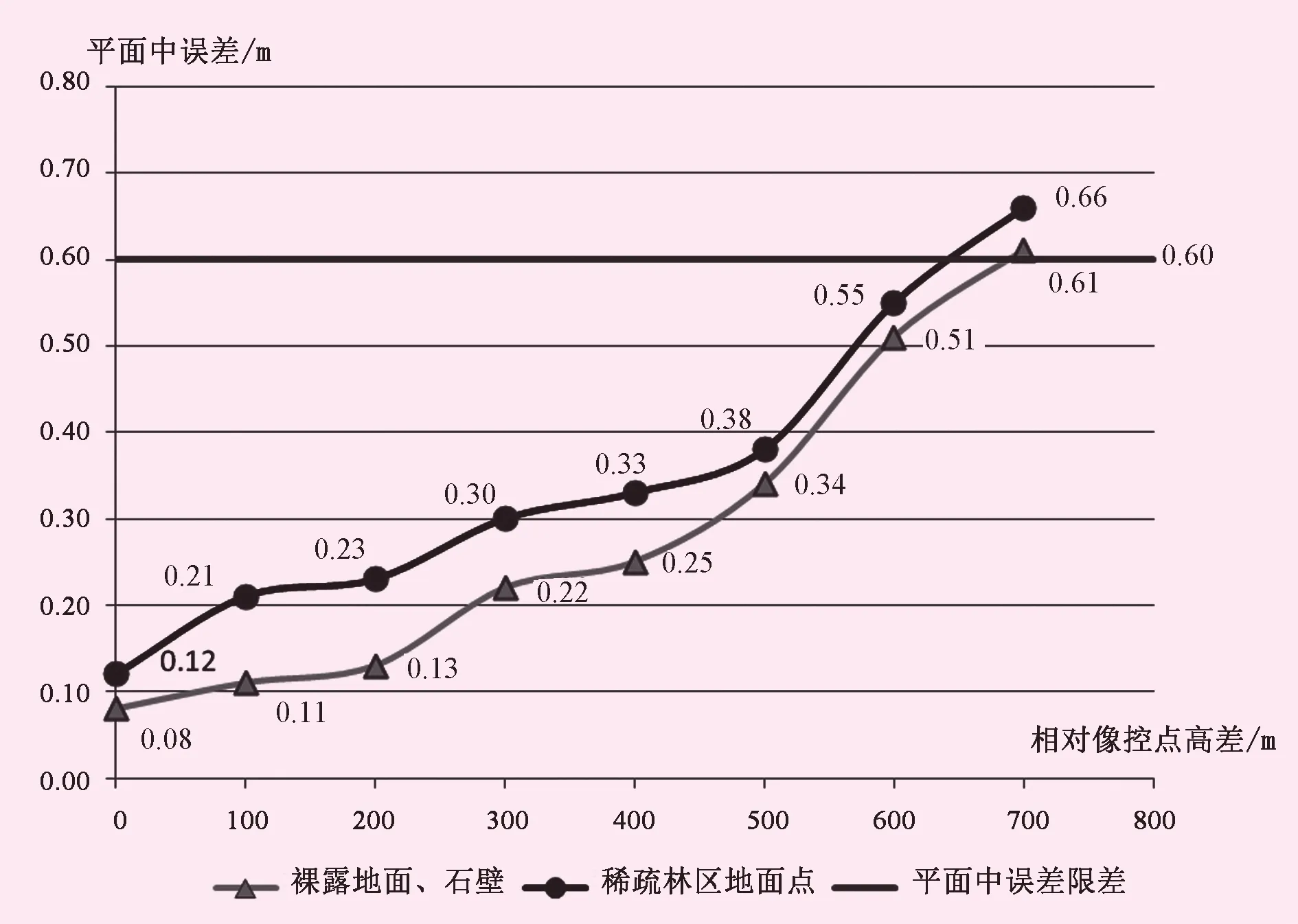
图5 检查点相对像控点高差与平面中误差关系图
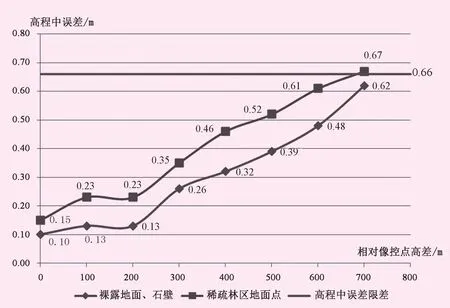
图6 检查点相对像控点高差与高程中误差关系图
4 结 语
基于本次作业和航摄方案,在相对高差700 m、投影面积1.5 km2的试验区中,仅在谷底布设9个平高像控点后进行航摄作业、模型生产、检查成果精度。在检查计算后,对比项目内控精度指标和规范限差,发现稀疏林区平面和高程中误差均大于裸露的地面和石壁;且随着地面检查点与像控点的相对高差变大,所有检查点的实测坐标与模型采集坐标平高中误差均逐渐变大,在检查点相对像控点高差600 m以下时精度满足项目内控指标要求;在达到700 m时超出内控指标,但仍满足1∶2000测图规范精度。经加入不同数量像控点的多种方法计算,发现本套设备及方案在本实验区1.5 km2范围内像控点合理数量为9个,若大于9个像控点,平面和高程精度并未发现大幅提升。
本文对比介绍了本套系统在水电站高边坡实景三维建模中的应用,其中长航时多旋翼为电量消耗大的变高飞行方案提供了有力支持,通过使用长焦距、小畸变五镜头相机进行航摄,配合高精度PPK系统辅助平差减少了像控点数量,提高了空中三角测量成功率,有效解决水电站高边坡实景建模工程中常规单镜头相机航摄模型观感差、漏洞多等问题。该地区使用本套设备和方案可满足1∶2000模型精度且纹理良好、无明显亮度差和色,为其他落差高、植被厚的峡谷地区三维建模提供了思路。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
煤气与热力(2021年10期)2021-12-02
天津医科大学学报(2021年4期)2021-08-21
装饰装修天地(2020年11期)2020-07-04
国际呼吸杂志(2019年4期)2019-03-12
测控技术(2018年10期)2018-11-25
铁道勘察(2018年5期)2018-10-22
中小企业管理与科技·下旬刊(2017年7期)2017-08-24
房地产导刊(2015年6期)2015-10-21
现代计算机(2015年31期)2015-09-28