基于AC-DBD等离子体激励的NACA0012翼型动态失速控制
2021-05-19 02:19史志伟姚张奕
气体物理 2021年3期
沙 珺, 史志伟, 陈 臻, 姚张奕
(南京航空航天大学航空学院空气动力学系非定常空气动力学与流动控制工信部重点实验室, 江苏南京 210016)
引 言

动态失速现象是指飞行器或飞行部件在做非定常运动时, 因绕流分离导致翼型上表面大范围气流分离使起始失速发生动态延迟这一复杂非定常气动现象[1]. 该现象普遍存在于快速俯仰机动的战斗机机翼[2]、 直升机旋翼的桨叶[3]、 垂直轴风力机叶片[4]等. 与翼型静态失速不同, 动态失速会明显延迟气流分离和失速现象的发生, 使之在超过静态失速角而不超过动态失速角的范围内, 仍能保持较高的气动效益, 但同时超过动态失速角后, 该现象也会导致升力陡降、 阻力陡增、 气动特性急剧恶化乃至颤振等问题[5].
几十年来, 各国均对动态失速进行了大量研究. 研究早期是为了理解和预测各种情况下桨叶俯仰振荡的气动特性问题; 而之后各国对高性能飞行器提出的“过失速机动”等要求, 则成为研究主要目标. 早在20世纪 70 年代中期, 世界各国就开始对战斗机动态失速区域范围内大攻角机动的空战效能进行研究. 20世纪80年代初, 联邦德国的Herbst就首先提出了“超机动性”概念[6], 认为未来近距离空战要求战斗机具有快速机动能力, 必须采用过失速机动技术, 因此世界各国都十分重视与该技术有关的动态失速方面的研究.
关于动态失速的成因, 国内外诸多学者已经达成了共识, 正常条件下翼型前缘逆压梯度和绕流分离是动态失速发生的主要诱因. 基于这种论点, 国内外陆续提出了几种控制方法. 国内西工大许和勇等使用充气前缘技术对SC1095翼型进行控制[7], 结果表明该技术通过在翼型前缘下表面安装弹性结构气囊改变气动外形抑制前缘分离涡的产生和发展, 从而有效控制了动态失速. 杨慧强等使用联合射流技术对NACA0012翼型进行控制[8], 结果表明该技术可以改善翼型动态失速特性. 国外如德国航空航天中心Heine等使用前缘圆柱形涡发生器对OA209翼型进行控制[9], 结果表明涡发生器降低了前缘动态失速涡的强度, 控制效果明显. 韩国光州科技学院的Kim等使用脉冲射流技术对VR-12翼型进行控制[10], 结果表明该技术有效抑制了翼型下俯过程中的流动分离. 以上各种控制方法均通过改变失速过程中前缘的局部流动结构, 影响下游大范围分离流动, 从而达到控制动态失速的效果.
等离子体控制具有响应快、 激励频带宽、 能耗低等优点[11], 是流动控制领域热门控制方式之一, 其在飞行器增升减阻[12-13]、 分离抑制[14]、 力矩控制[15]等方面具有广泛应用, 因此近些年国内外也开展了关于等离子体动态失速控制方面的研究. 国内西工大宋科等通过仿真计算对NACA0012翼型等离子体控制进行了研究[16], 结果表明等离子体激励能抑制前缘涡的出现、 发展和脱落, 有效控制动态失速. 气动院李国强等也通过实验对S809翼型等离子体控制进行研究[17], 结果表明等离子体能有效控制翼型动态失速, 改善平均气动力, 提高翼型气动效率, 减小升力及力矩系数曲线的迟滞环面积. 国外Singhou等使用纳秒脉冲等离子体控制技术对NACA0015翼型进行控制[18], 结果表明激励频率会影响控制效果, 频率越高, 升力及俯仰力矩系数越平滑且波动越小, 同时动态失速发展受到抑制, 峰值升力系数降低且俯仰力矩系数出现滞后.
本文通过动态测压以及PIV技术, 以等离子体应用于NACA0012翼型动态失速控制为主要研究内容, 研究等离子体激励对翼型俯仰及耦合运动下动态失速的控制效果, 并通过改变运动频率、 激励频率等相关参数研究影响等离子体控制效果的各种因素, 为后续研究提供数据基础.

1 实验设备
1.1 风洞
本实验在南京航空航天大学1 m非定常低速风洞中进行, 风洞实验段长1.7 m, 出口截面为1.5 m ×1.0 m矩形开口, 设计最高风速为40 m/s, 最小稳定风速为5 m/s, 湍流度0.08%. 风洞结构如图1所示.

图1 风洞结构示意图Fig. 1 Wind tunnel structure
1.2 二自由度耦合运动机构
为了实现二维翼型的俯仰、 浮沉及耦合运动, 使用了一套两自由度耦合运动机构, 如图2所示. 该机构主要由两部分组成: 一个是控制浮沉运动的位移平台, 由伺服电机驱动按照一定规律产生直线运动, 用以模拟翼型浮沉运动, 另一个是控制俯仰运动的旋转电机, 带动模型旋转用于模拟翼型绕转轴的俯仰运动, 旋转电机安装在位移平台上且互相独立. 该机构浮沉运动范围为±125 mm, 运动频率可超过2 Hz; 俯仰运动范围±60°, 运动频率可超过4 Hz. 浮沉运动位移量由位移平台上的位移传感器测量, 俯仰运动时的角度则由安装在转轴上的高精度角度编码器测量.
该运动机构配合相关运动控制系统, 能够完成以下几种运动模式: (1)指定迎角下的静止状态; (2)指定俯仰角范围和运动频率的俯仰运动; (3)指定位移距离和运动频率的浮沉运动; (4)指定俯仰角范围、 位移距离、 运动频率和相位差的耦合运动. 该机构在每次运动结束后自动输出相关运动时间、 俯仰角度及位移文件便于后续处理.
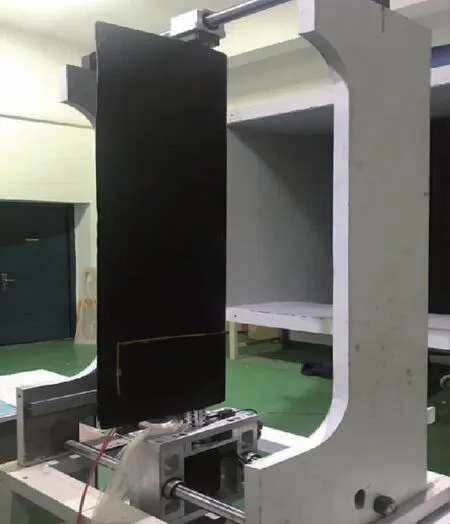
图2 二自由度耦合运动机构Fig. 2 Coupling mechanism with two degrees of freedom
该二自由度运动机构额外安装了一个继电器, 配合位移传感器、 角度编码器、 运动控制系统以及外接信号发生器和同步器, 可以实现实验相关的同步触发等操作. 该机构在电源部分外接一个单项交流三级滤波器, 用以过滤外接电源电压波动及伺服电机运行对测量结果产生的干扰.
1.3 实验模型及激励器
实验以NACA0012翼型为研究对象, 模型弦长300 mm, 展长1 m, 转轴位于25%弦线处. 翼型表面开测压孔, 外接测压管与压力传感器相连接进行压力分布测量. 模型图及测压孔坐标如图3和表1所示, 其中上表面测压孔编号从前到后为1~28, 下表面为29~42.
模型上表面前缘位置布置等离子体激励器. 考虑到控制机理、 实验参数及干扰性等相关问题, 采用单极表面介质阻挡放电(dielectric-barrier-discharge, DBD)激励器, 铜箔作电极, 正负极铜箔宽度均为3 mm, 对前缘测压孔密集分布影响较小, 放电介质使用Kapton胶带(聚酰亚胺胶带), 激励器结构及实物图如图4所示.
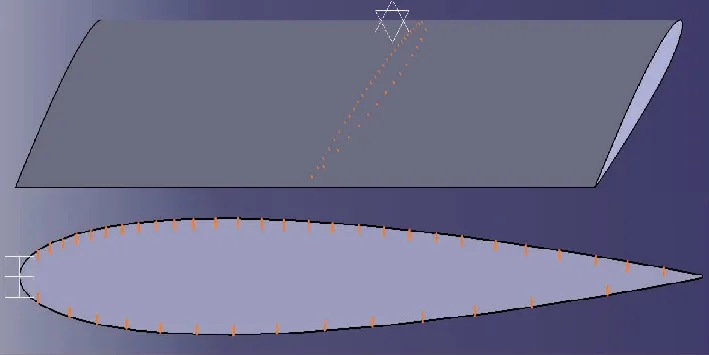
图3 实验模型图Fig. 3 Experimental model diagram
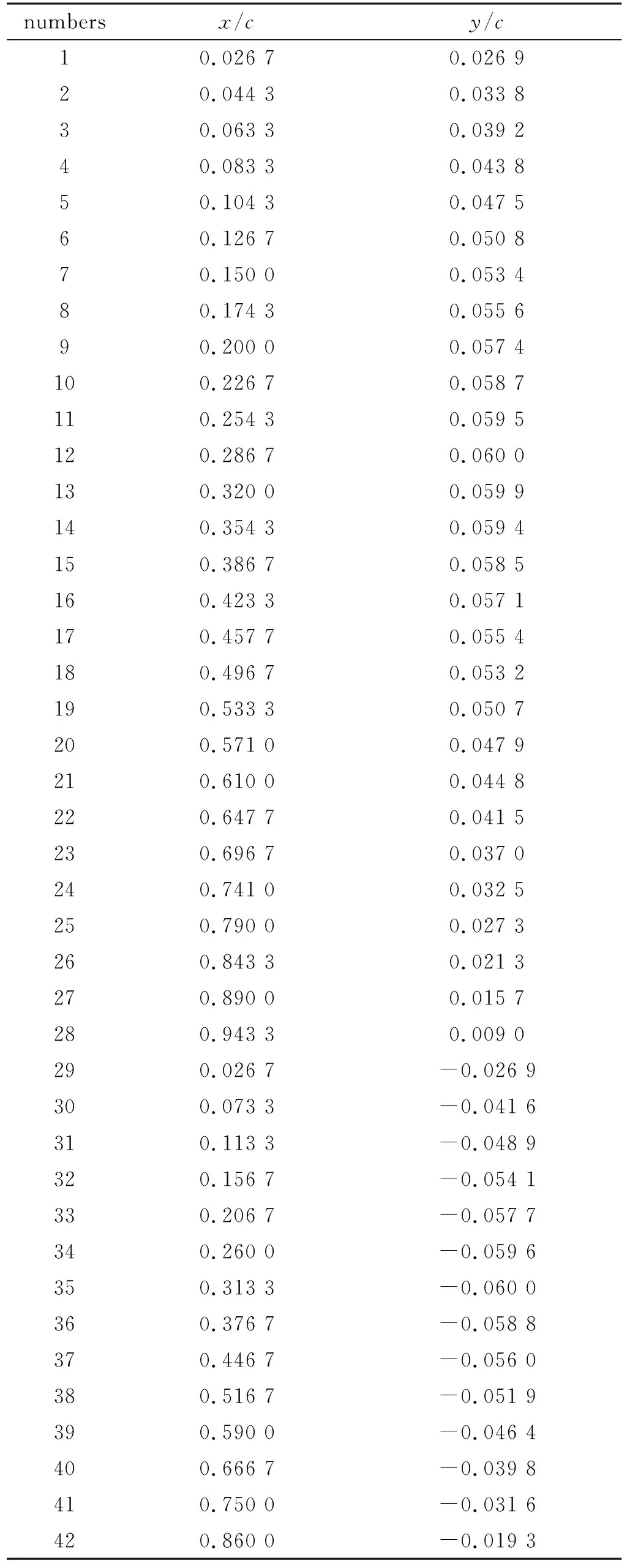
表1 测压孔坐标
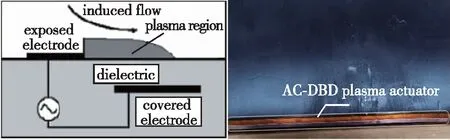
图4 激励器结构及实物图Fig. 4 Structural and physical pictures of the actuator
激励器采用毫秒级低温AC等离子体实验电源, 输出电压的调节范围为0~30 kV, 频率为 10 kHz, 波形为正弦波. 电源带有频率调制装置, 调制频率范围为1~500 Hz, 占空比可调, 可通过调制输出不同强度、 频率以及占空比的激励电压. 实验电源及相关调制装置如图5所示.
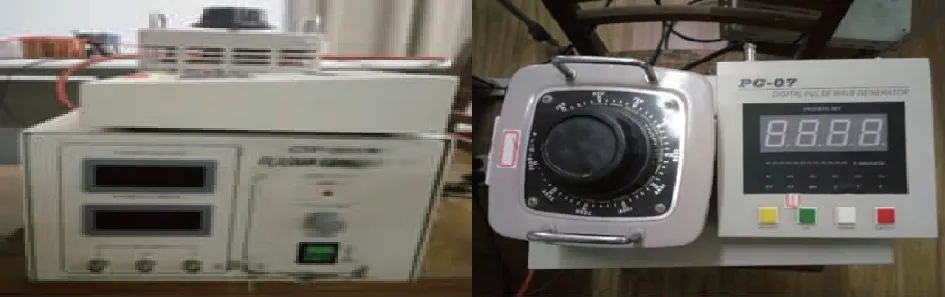
图5 低温AC等离子体实验用电源及调制装置Fig. 5 AC plasma power supply and modulation device
1.4 数据采集系统
(1)压力测量系统
实验中压力测量系统主要由PSI压力扫描阀组成, 如图6所示. 该套系统可通过外触发模式, 配合运动机构输出的外触发信号, 实现同步触发采集及锁相采集等相关功能. 该套系统具有64个采集通道, 采集频率最高可达335 Hz, 结合下文实验方案及误差分析, 系统参数满足实验要求.

图6 PSI压力测量系统Fig. 6 PSI pressure measurement system
(2)粒子图像测量系统
该粒子图像测量系统所用光源为镭宝公司Vlite-200 PIV激光器, 输出功率为20~200 mJ, 最大工作频率为15 Hz , 脉冲宽度6~8 ns. 所用图像采集装置为TSI公司的PIVCAM10-30互/自相关CCD数字相机, 分辨率为 2 048×2 048 像素, 双帧频为14帧/秒, 每两帧最小时间间隔约为1 μs. 该系统存在外触发接口, 可配合二自由度运动机构外触发输出信号实现同步采集以及锁相采集等相关功能用以克服系统采集频率较低的不足, 完成相关数据测量, 提高数据准确性. 整个粒子图像测量系统如图7所示.

图7 粒子图像测量系统Fig. 7 Particle image measurement system
2 实验方案及误差分析
2.1 实验方案
研究表明影响翼型俯仰运动动态失速发展的因素主要有翼型气动外形[19]、 来流Mach数[20]、 运动频率等[21-22], 另外耦合运动中浮沉运动对应等效迎角及耦合运动相位差也会对动态失速的发展产生影响. 本文实验选定模型为NACA0012翼型, 来流速度固定为10 m/s, 对应基于弦长的Reynolds数为 2.05×105, 主要研究模型运动参数及激励器激励参数对等离子体动态失速控制效果的影响.
(1)模型运动参数的确定
本文实验模型为NACA0012翼型, 气动外形为中等厚度翼型, 为保证翼型动态失速为深失速过程, 其俯仰运动角度确定为0°~28°. 研究表明动态实验存在以下运动参数相似性准则[23-24]
(1)
(2)
式中,f为翼型对应运动频率,c为翼型弦长,u∞为来流速度,h为翼型浮沉运动距离的一半. 式(1)中k+为俯仰运动下的减缩频率, 对应俯仰运动频率相似参数, 式(2)中Ste为浮沉运动下的Strouhal数, 对应浮沉运动频率相似参数.
根据以上运动参数相似准则, 结合相关文献以及二自由度运动机构相关运动参数限制, 实验涉及的俯仰及浮沉运动参数设计方案如表2所示.
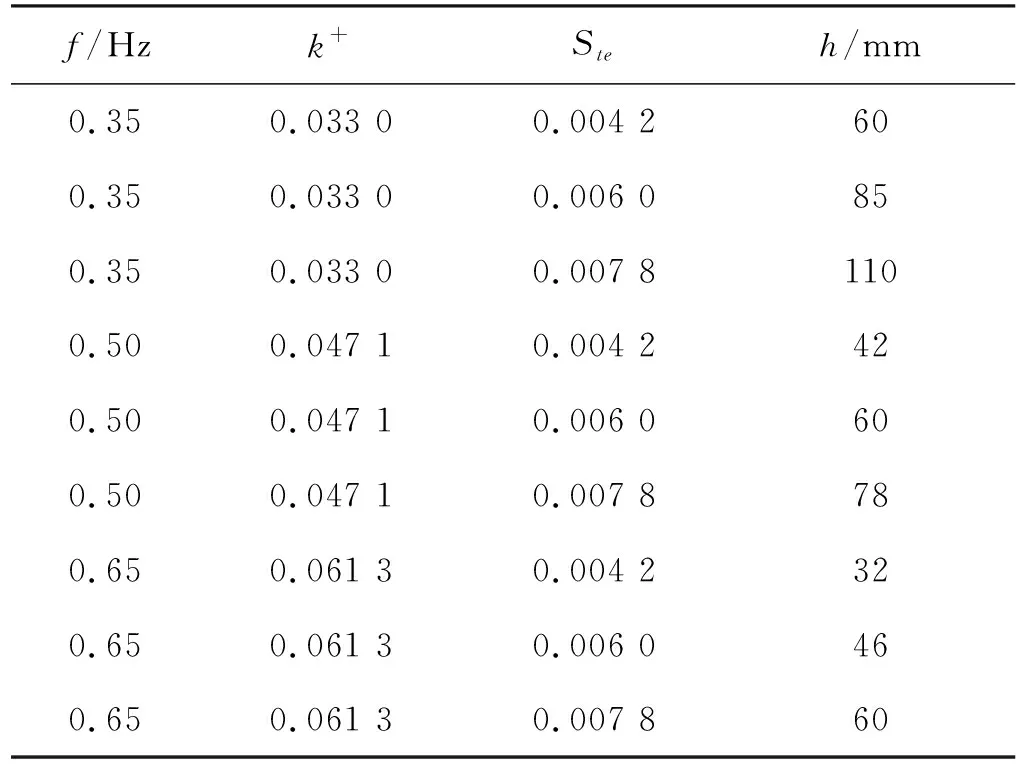
表2 俯仰及浮沉运动参数设计表
根据表2, 确定相关俯仰和浮沉运动方程如下
α(t)=14-14cos(2πft)
(3)
h(t)=hcos(2πft+θ)
(4)
其中,t为运动时间,θ为耦合运动中俯仰和浮沉运动的相位差, 实验中分别取0π, 0.5π, 1π和1.5π. 式(3)为俯仰运动方程, 式(4)为浮沉运动方程.
(2)激励器激励参数的确定
研究表明影响激励器控制效果的激励参数主要为激励器激励电压和激励频率[25-26], 其中关于激励频率的确定, 有以下公式
F+=fsc/u∞
(5)
其中,fs为激励器激励频率,F+对应归一化激励频率, 且F+约等于1时控制效果最好. 因此设计以下两组实验方案:
第一组实验: 激励电压对控制效果的影响. 分别取激励电压UPP为0, 8, 10 kV, 探究激励电压对激励器控制效果的影响;
第二组实验: 激励频率对控制效果的影响. 在激励电压恒定为8 kV的情况下, 通过调制器调节电源占空比为50%, 从而将激励模式从连续激励改变为10, 35, 100 Hz低频激励, 对应F+分别为 0.3, 1.05, 3, 探究变激励频率对激励器控制效果的影响.
2.2 实验误差分析
(1)偶然误差修正. 因动态实验非定常性及每次测量结果的不可重复性, 实验结果存在相应偶然误差[27]. 本文实验通过多次重复实验取得足够数量的实验数据并进行平均化处理以减少上述偶然误差.
(2)外接测压管误差修正. 由于条件限制, 本文实验通过外接测压管至压力传感器进行压力测量而不是直接在翼型表面安装压力传感器. 研究表明, 外接测压管测得的压力信号会产生畸变[28-29], 须对其频响特性进行测定, 若畸变过大则必须进行相关数据修正.
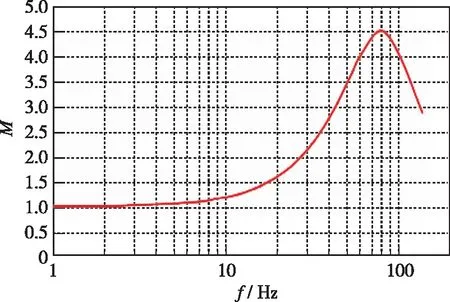
给定已知变化流场, 对由外接测压管测得的压力数据和由压力传感器直接测得的数据进行对比分析, 其频响特性曲线如图8所示, 其中M为幅值比, φ为相位差.
(a) Amplitude ratio
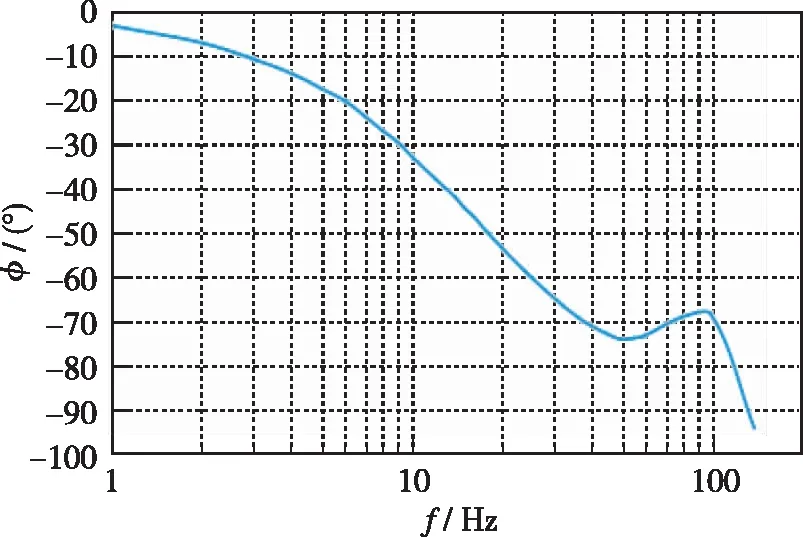
(b) Phase difference图8 模型测压管频响特性曲线图Fig. 8 Frequency response curve of pressure tube in model
实验结果表明, 压力变化频率小于10 Hz的情况下, 外接测压管对压力数据产生的影响较小. 本文实验中流场随运动状态变化频率小于1 Hz, 可以近似认为测压系统测得的数据准确, 误差可忽略.
(3)环境误差修正. 除了以上实验设计本身存在的误差外, 实验环境也存在相关干扰导致误差, 如运动机构运行时产生的微小振动、 风洞运行时的洞壁振动、 等离子体电磁干扰等. 本文针对以上实验环境导致的误差均进行了相关处理, 如在系统数据采集端安装高频滤波器过滤高频微小振动, 对所有数据采集系统进行电磁隔离抗干扰处理等, 通过以上方法降低实验环境干扰产生的误差.
3 数据结果分析
3.1 俯仰运动下等离子体控制效果
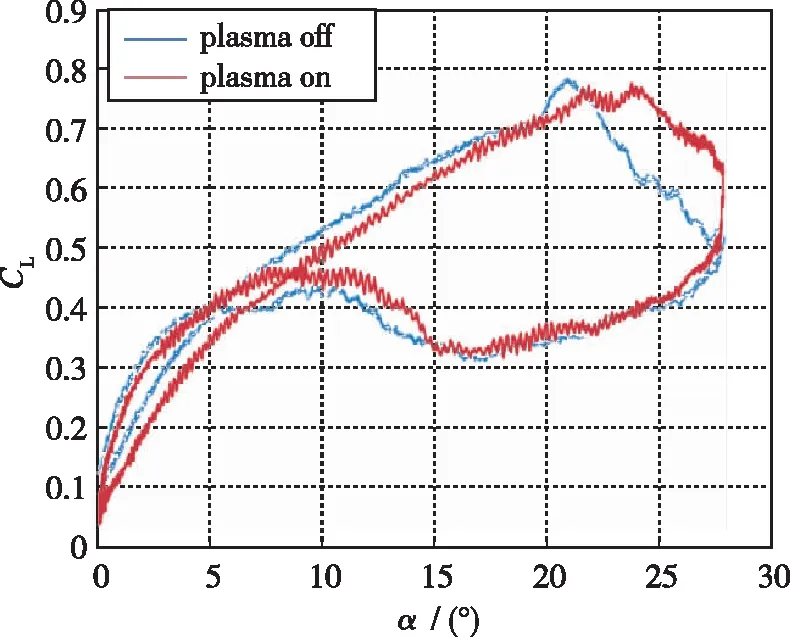
以翼型0.5 Hz频率俯仰运动动态失速为例, 施加8 kV连续激励前后升力及俯仰力矩系数曲线如图9所示.
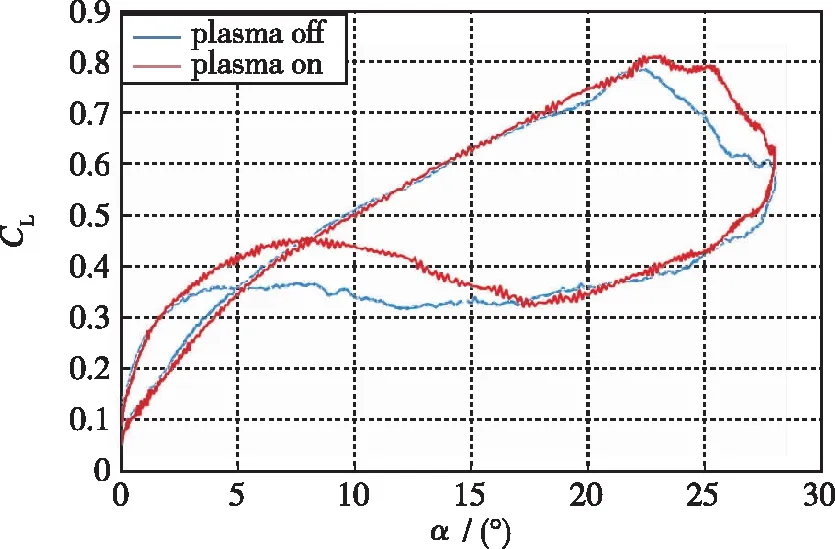
(a) Lift coefficient
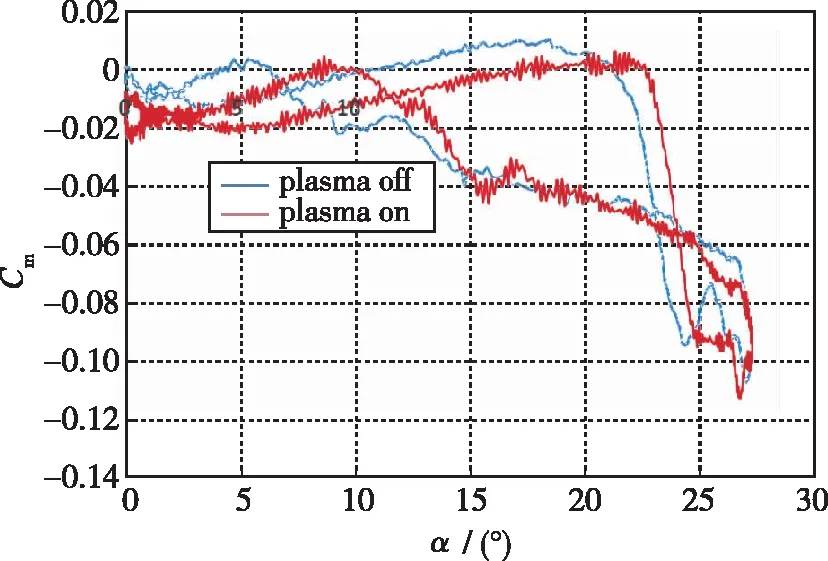
(b) Pitching moment coefficient图9 施加激励前后翼型升力及俯仰力矩系数曲线Fig. 9 Curves of lift and pitching moment coefficient with/without excitation
如图所示, 施加激励后上仰0°~21°, 层流及涡量积累阶段升力系数无明显变化; 上仰21°~28°, 动态失速阶段失速迎角明显后移, 高升力系数阶段范围得到扩展; 下俯阶段升力系数曲线提前回升. 总体来说, 施加激励后, 翼型失速迎角延后, 最大升力系数提高, 升力系数提前回升, 动态失速影响范围减小, 气动特性明显改善.
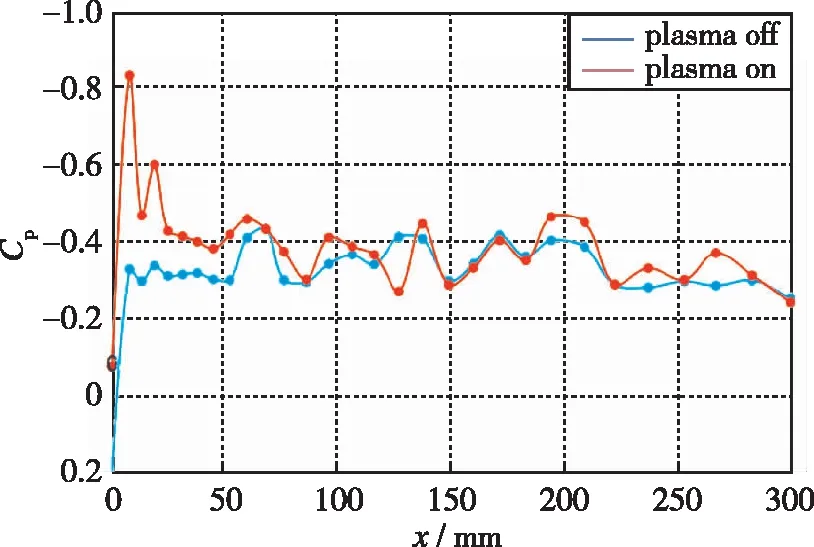
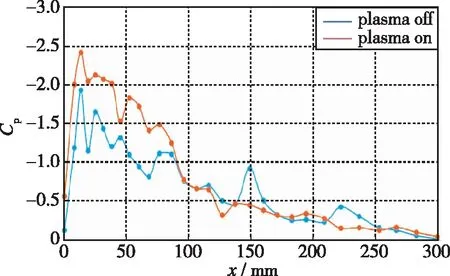
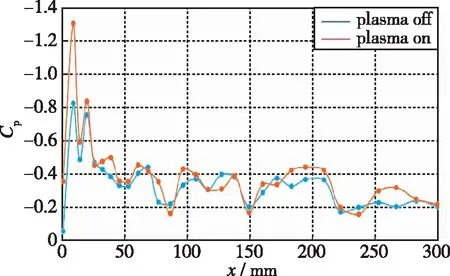
另外从图像可以看出上仰阶段22°~25°范围内施加激励前升力系数陡降, 施加后仍维持较高升力系数; 下俯阶段17°~12°范围内施加激励前升力系数较低, 施加后升力系数开始回升. 为探究等离子体激励控制机理, 取激励器开启前后上仰22.5°及下俯16°翼型上表面压力分布及涡量云图进行分析, 如图10, 11所示.
如图所示可以发现, 上仰阶段施加激励后流动分离现象得到明显控制, 前缘压力系数绝对值增大, 使得升力系数继续维持较高水平, 失速迎角延后; 下俯阶段施加激励后翼型前缘提前开始流动再附, 前缘压力系数绝对值回升, 使得升力系数提前回升, 提前脱离动态失速阶段.
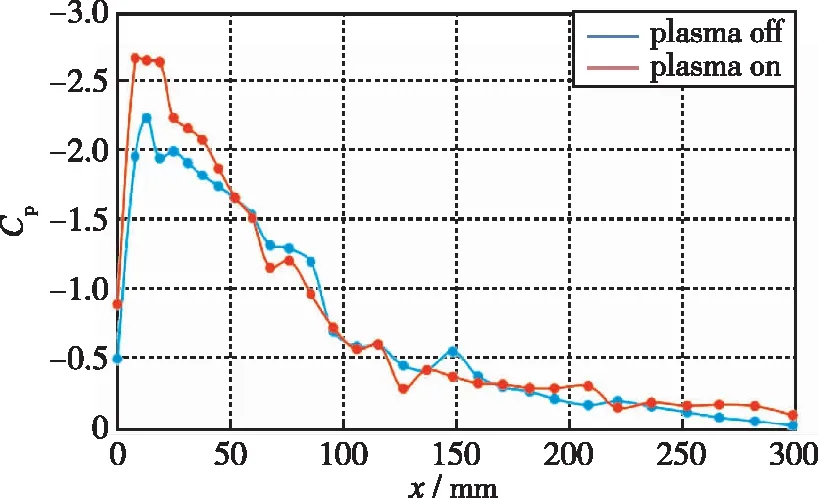
(a) Pressure distribution
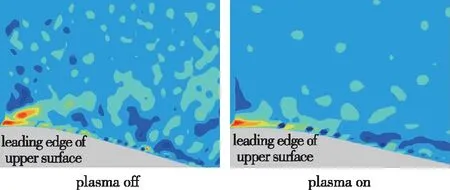
(b) Vorticity contour图10 施加激励前后翼型上仰22.5°上表面压力分布及涡量云图Fig. 10 Pressure distribution and vorticity contour on upper surface at 22.5° upwards with/without excitation
(a) Pressure distribution
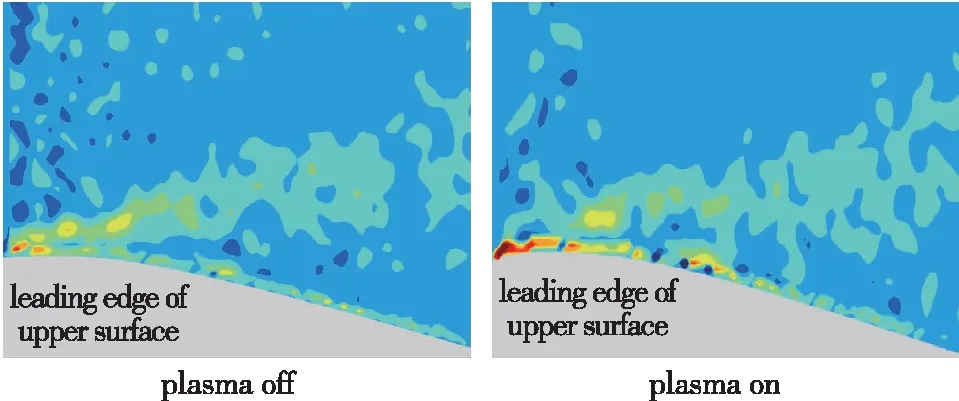
(b) Vorticity contour图11 施加激励前后翼型下俯16°上表面压力分布及涡量云图Fig. 11 Pressure distribution and vorticity contour on upper surface at 16° downwards with/without excitation
综上, 以上实验结果均表明等离子体激励对于翼型动态失速控制具有良好效果. 在上仰阶段, 施加等离子体激励有效抑制了流动分离, 增大了动态失速迎角, 继续保持较高升力系数; 在下俯阶段, 使流动再附提前, 升力系数提前回升; 从整体看, 等离子体激励增大了动态失速迎角, 提前了升力系数的回升, 缩小了全过程动态失速的影响范围, 使得翼型能在更大范围迎角内保持较高升力系数, 削弱了动态失速的不利影响, 大大改善了翼型全阶段的平均气动特性.
3.2 不同参数下的等离子体控制效果
俯仰运动下影响等离子体控制效果的环境、 运动及激励器设置参数有很多, 如Reynolds数、 Mach数、 俯仰运动频率和幅度、 激励电压和激励频率等, 本文主要探究其中较为重要的俯仰运动频率以及激励频率对等离子体控制效果的影响.
(1)不同俯仰运动频率下的等离子体控制效果
相同激励条件下, 运动频率0.35, 0.5, 0.65 Hz 施加激励前后翼型升力系数曲线如图12所示. 从图中可以看出随着频率增大, 动态失速迎角延后程度及升力系数提高程度有所降低, 等离子体控制效果减弱. 产生以上现象的原因可能是随着频率增大, 翼型动态效应增强, 动态失速加剧, 使得相同激励强度下的等离子体控制效果降低, 因此当俯仰运动频率增加时须对应增大激励强度才能保证控制效果不出现明显下降.
(2)不同激励频率下的等离子体控制效果
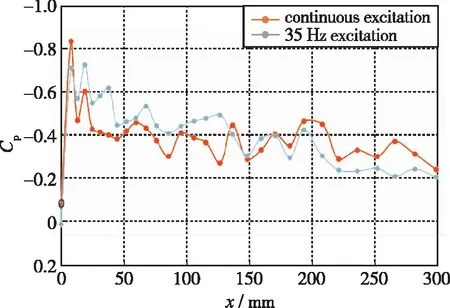
研究表明, 改变激励频率能明显影响等离子体控制效果, 且式(5)中对应F+约等于1时效果最好. 因此为提高控制效果, 以翼型0.5 Hz俯仰运动为对象, 研究不同激励频率对控制效果的影响. 不同激励频率下翼型升力系数曲线如图13所示, 其中激励频率选择分别为占空比50%的10, 35, 100 Hz 低频激励及连续激励, 对应F+分别为0.3, 1.05, 3以及300.
(a) f=0.35 Hz
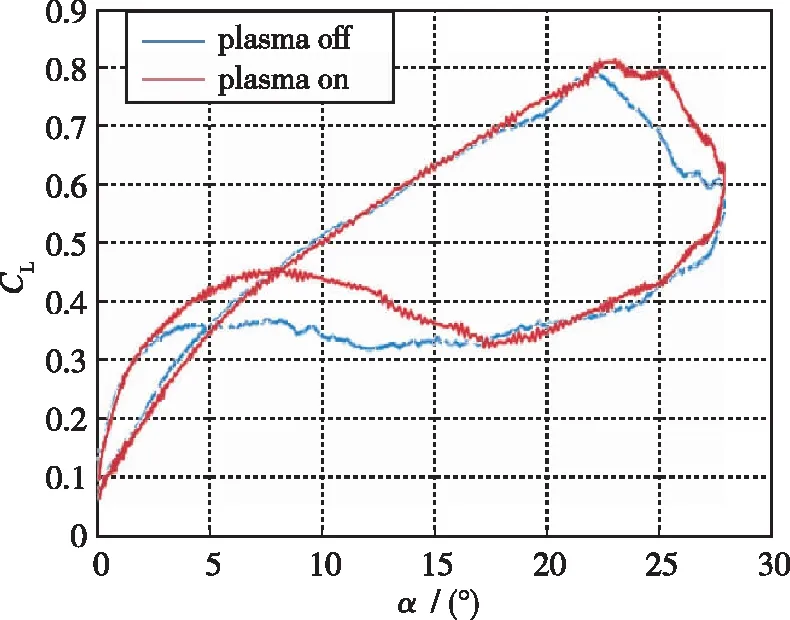
(b) f=0.50 Hz
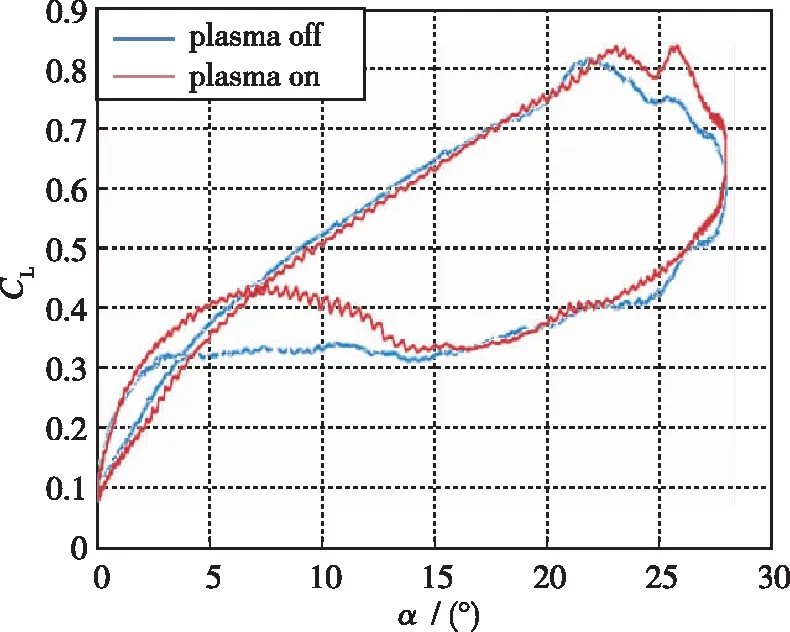
(c) f=0.65 Hz图12 不同运动频率下施加激励前后翼型升力系数曲线Fig. 12 Lift coefficient curves of airfoil with/without excitation at different motion frequencies
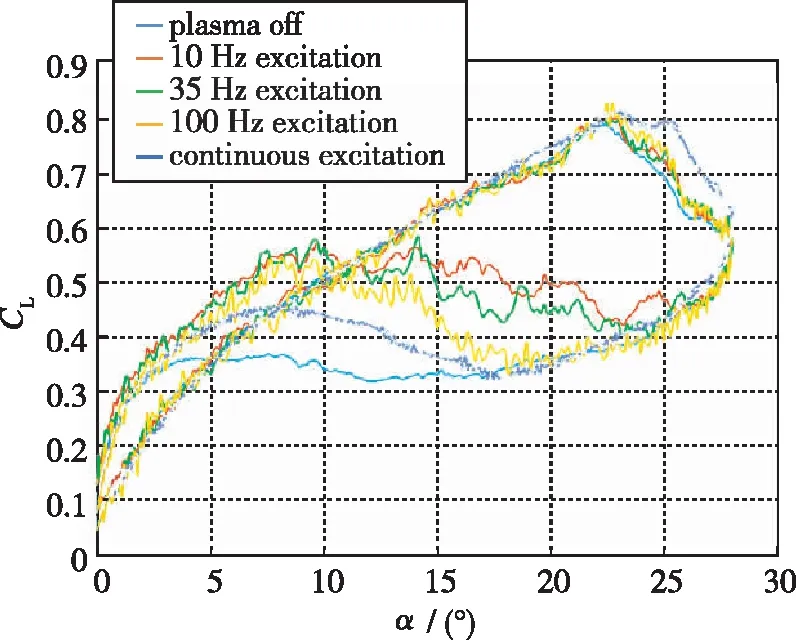
图13 不同激励频率下翼型升力系数曲线图Fig. 13 Lift coefficient curves of airfoil at different excitation frequencies
由图可以发现, 改变激励频率对控制效果影响明显. 相较于连续激励, 低频率激励下上仰阶段失速迎角延后不太明显, 升力系数提高程度较低, 但下俯阶段低频激励相较连续激励能明显提前流动再附, 并且频率越低再附越早, 但过低的激励频率会导致流场非定常性增强, 从而导致升力系数波动变大, 易引发机翼颤振等不利气动现象, 图中10 Hz 激励频率对应升力系数曲线大幅度波动也证明了以上问题. 另外, 由图可知下俯阶段控制效果随激励频率提高变化明显, 图中激励频率仅从35 Hz 提高到100 Hz, 升力系数下降幅度明显增大, 流动再附角度也从23°推迟到19°, 整体控制效果大幅下降. 综上, 35 Hz激励在该实验方案内平均控制效果最佳, 与文献结论一致.
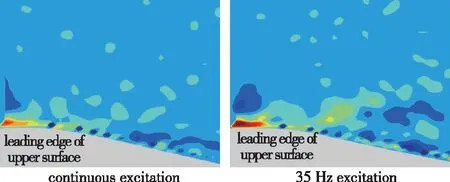
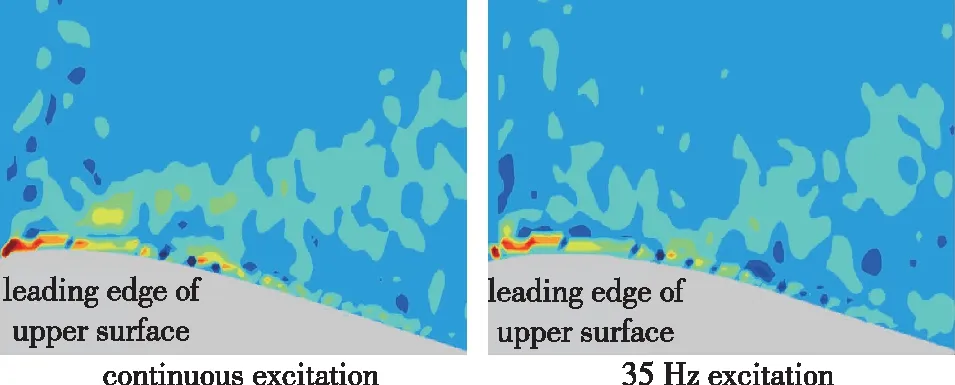
为探究连续激励和35 Hz低频激励控制机理上的差异, 以施加激励前后翼型上表面流场分布为研究对象, 图14, 15分别为连续激励及35 Hz激励情况下上仰22.5°以及下俯16°的翼型上表面压力分布及涡量云图.
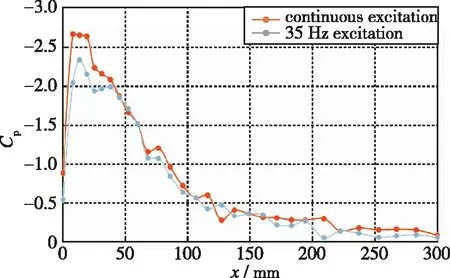
(a) Pressure distribution
(b) Vorticity contour图14 连续激励及35 Hz激励下翼型上仰22.5°上表面压力分布及涡量云图Fig. 14 Pressure distribution and vorticity contour on upper surface at 22.5° upwards with continuous and 35 Hz excitation
(a) Pressure distribution
(b) Vorticity contour图15 连续激励及35 Hz激励下翼型下俯16°上表面压力分布及涡量云图Fig. 15 Pressure distribution and vorticity contour on upper surface at 16° downwards with continuous and 35 Hz excitation
由图14, 15可以看出在上仰22.5°情况下, 连续激励相较于35 Hz激励能更好抑制前缘流动分离, 前缘压力系数绝对值提升幅度更大, 控制效果更好; 下俯16°则相反, 35 Hz激励相较于连续激励更快使得流动再附, 翼型前缘压力系数绝对值回升幅度更大.
综上, 翼型上仰0°~21°阶段翼型上表面大部分时间处于层流状态, 等离子体基本无控制效果; 21°~28°动态失速现象发生阶段连续激励控制效果更好, 使得失速迎角明显延后, 升力系数维持较高水平时间更久; 下俯阶段35 Hz激励则能够更好诱导流动提前再附, 升力系数更早回升.
3.3 耦合运动动态失速特性及等离子体控制效果
研究表明, 浮沉运动对俯仰运动的影响可以看作等效迎角[30], 相关公式如下
αe=-tan-1[h′(t)/u∞]
(6)
其中,h′(t)为式(4)关于时间t的倒数, 将式(4)带入式(6)可得
αe=tan-1[2πfhsin(2πft+θ)/u∞]
(7)
当翼型做上浮运动时, 根据式(7)等效迎角为负, 升力系数相较俯仰运动会降低; 下沉运动同理, 等效迎角为正, 升力系数有所提高. 基于以上结果, 以运动频率0.5 Hz浮沉距离±60 mm的耦合运动为研究对象, 研究相位差对翼型动态失速的影响. 不同相位差下耦合运动升力系数曲线如图16, 上仰24.5°及下俯12°上表面压力分布如图17所示.
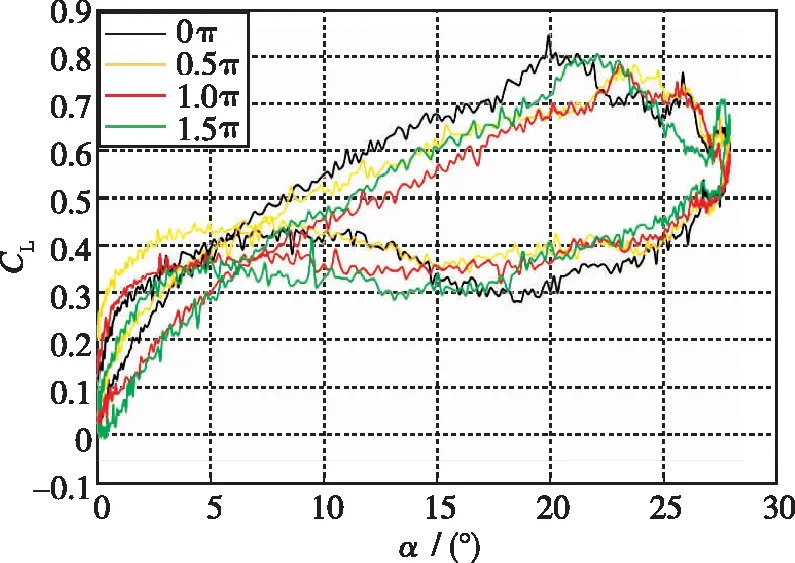
图16 变相位差翼型耦合运动升力系数曲线Fig. 16 Lift coefficient curves with variable phase difference
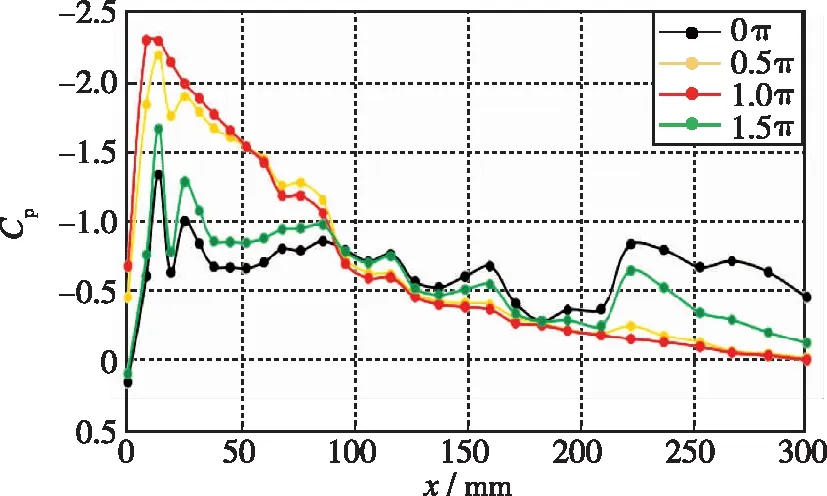
(a) Pressure coefficient on upper surface at 24.5° upwards
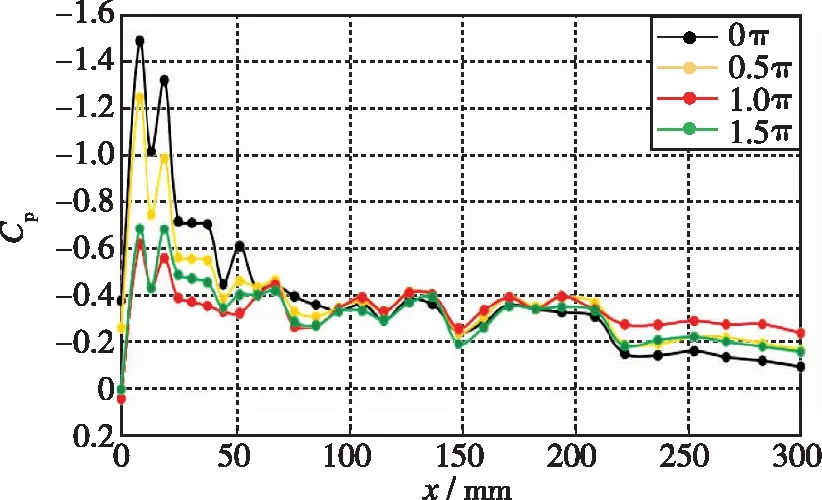
(b) Pressure coefficient on upper surface at 12° downwards图17 变相位差翼型上仰24.5°及下俯12°上表面压力分布Fig. 17 Pressure distribution on upper surface at 24.5° upwards and 12° downwards with variable phase difference
由图16, 17可知上仰阶段到达动态失速角的相位差前后顺序分别为0π, 1.5π, 0.5π和1π, 下俯阶段流动再附顺序则为0π, 0.5π, 1.5π和1π, 与将各相位差带入式(7)所得理论结果一致.
从图中可以看出, 耦合运动下翼型动态失速发展相较于纯俯仰运动存在一定区别, 具体体现在不同相位差对动态失速发展的影响, 如0π相位差下翼型上仰过程完全动态失速及下俯过程流动再附最先发生, 整体升力系数曲线迟滞环面积最小, 动态失速程度在各相位差情况下最低, 而π相位差则正好相反. 总体来说, 耦合运动下动态失速气动特性相较于纯俯仰运动更加严重, 须对其进行流动控制.
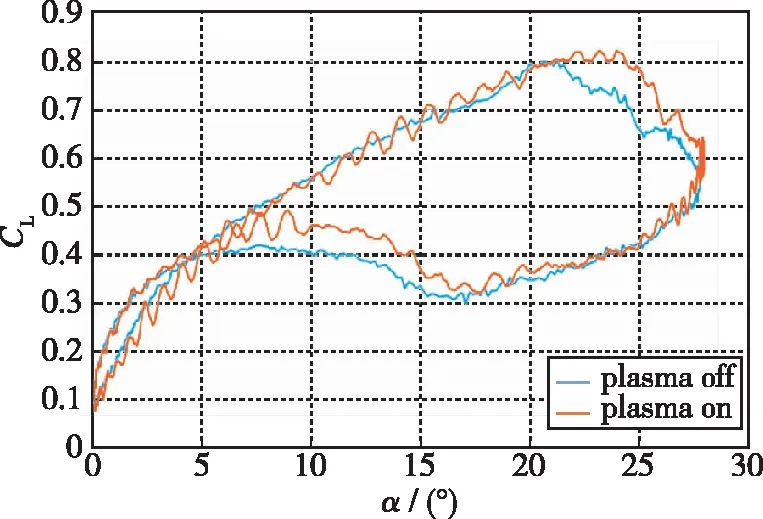
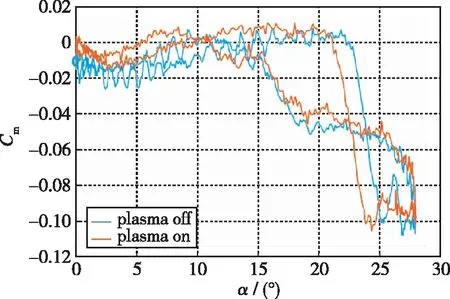
为探究耦合运动情况下等离子体激励控制效果, 以0.5 Hz运动频率, ±60 mm浮沉距离, 0π相位差运动参数的耦合运动作为研究对象, 施加等离子体激励前后升力及俯仰力矩系数如图18所示, 上仰22.5°及下俯16°上表面压力分布如图19所示.
如图18, 19所示, 对比图9可以看出, 整体而言耦合运动下控制效果和纯俯仰运动类似, 施加激励后上仰过程流动分离被抑制, 动态失速迎角延后, 最大升力系数提高, 下俯阶段流动再附提前, 升力系数回升提前, 整体气动特性得到改善. 同时在同等条件下, 耦合运动下等离子体激励存在一定控制效果, 但对比俯仰运动控制效果明显降低, 延后动态失速角及提前流动再附的效果均没有纯俯仰运动好, 可能是耦合运动增强了翼型动态失速过程中的动态效应, 导致同等强度等离子体激励控制效果的降低.
综上, 耦合运动下动态失速相较于纯俯仰运动更严重, 其中浮沉运动方程对应的等效迎角及耦合运动相位差对其动态失速发展影响最大. 耦合运动下等离子体控制效果对比纯俯仰运动有所降低, 因此同等条件下耦合运动的控制方案设计, 须提高对应激励强度才能获得理想控制效果.
(a) Lift coefficient
(b) Pitching moment图18 耦合运动施加激励前后升力及俯仰力矩系数Fig. 18 Curves of lift and pitching moment coefficient with/without excitation in coupled motion
(a) Pressure coefficient on upper surface at 22.5° upwards
(b) Pressure coefficient on upper surface at 16° downwards图19 施加激励前后上仰22.5°及下俯16°上表面压力分布Fig. 19 Pressure distribution on upper surface at 22.5° upwards and 16° downwards with/without excitation
4 结论
为改善翼型动态失速气动特性, 以NACA0012翼型为研究对象, 基于等离子体控制技术在翼型前缘布置AC-DBD等离子体激励器, 通过动态测压及PIV技术针对翼型动态失速等离子体控制进行了相关研究. 研究表明, 等离子体激励能显著推迟动态失速迎角, 减小失速后升力系数陡降幅度, 提前升力系数回升, 减小升力及俯仰力矩系数曲线迟滞环面积, 改善全过程动态失速气动特性.
(1)等离子体激励通过动量注入能有效抑制前缘流动分离从而延迟动态失速迎角, 提前流动再附从而提前升力系数回升, 减小动态失速不利影响的范围, 改善失速全过程气动特性;
(2)翼型俯仰运动频率会影响等离子体控制效果. 运动频率越高, 翼型动态效应越强, 激励器控制效果越弱;
(3)激励频率对控制效果影响较大. 动态失速上仰层流阶段基本无控制效果, 上仰失速阶段连续激励控制效果更好, 下俯流动再附阶段低激励频率控制效果更好. 下俯再附阶段激励频率越低, 流动再附越早, 但流场非定常性越强, 升力系数波动越大, 易出现抖振等不利现象, 下俯再附阶段F+在1附近效果最好;
(4)耦合运动下翼型浮沉运动方程对应等效迎角以及耦合运动相位差会对动态失速发展产生影响. 耦合运动下等离子体激励能产生一定控制效果, 但相较于同等条件下的俯仰运动控制效果被削弱, 具体原因可能是耦合运动加强了翼型动态效应, 从而减弱了激励器控制效果.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
空间科学学报(2021年6期)2021-03-09
科学Fans(2019年4期)2019-04-30
燃气涡轮试验与研究(2018年3期)2018-12-09
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年2期)2017-11-24
北京航空航天大学学报(2016年3期)2016-02-27
科技传播(2014年4期)2014-12-02
少年科学(2014年7期)2014-08-18