上肢康复训练机器人镜像运动实现方法
2021-05-18 02:14:26李军强李铁军
中国生物医学工程学报 2021年6期
李军强 胥 述 杨 冬 李铁军
(河北工业大学机械工程学院,天津 300401)
引言
脑卒中是指由急性脑血管疾病引起的持续性的大脑神经功能受损,极容易导致病患偏瘫。康复疗法可以重建患者肢体与脑损伤的中枢神经之间的联系,并逐步刺激脑损伤部位的康复[1]。研究表明,镜像疗法可以促进脑卒中患者偏瘫肢体运动功能重建与脑功能重塑,从而改善患者上肢的运动功能[2-5]。
上肢镜像康复训练机器人主要研究健肢运动信息检测与处理、患肢运动轨迹规划与控制等,以实现应用健肢运动信息,驱动患肢进行康复训练的目的[6]。Tappeiner 等[7]开发的镜像康复机器人系统,利用摄像头拍摄患者健侧手臂上的光学标志物,得到患者的运动状态,将该运动状态实时镜像映射到患侧手臂,通过柔性传动机构驱动患侧手臂做出相应的动作。Kim 等[8]开发的机器人辅助镜像康复系统,应用角位移传感器测量健侧腕关节角度,当健侧手腕做旋转运动时,患侧的电机旋转到与健侧对称的角位置,实现镜像运动。Wang 等[9]开发的镜像康复运动机器人系统,采用外骨骼结构,应用惯性传感器获取健肢相应关节运动数据,控制系统控制外骨骼带动患肢运动。上述实现镜像运动的方法,需要患者穿戴特定标志物或传感器来完成健肢运动轨迹的检测,康复训练的舒适性和健肢运动会受到一定影响。为避免对健肢的影响,Claudio 等[10]开发了基于Kinect 的上肢辅助机器人系统,利用Kinect 检测目标物的空间位置从而逆解出机器人的运动路径,带动患者的患肢到达目标位置。瞿畅等[11]研制了一种体感控制的上肢外骨骼镜像康复机器人系统,利用Kinect 提取人体骨骼关节点数据,计算关节角度,将健肢的体势动作转化为控制信号,控制机械臂带动患肢做同步康复训练。
本研究利用Kinect 2.0 检测人体健肢运动信息,将运动信息实时映射到患肢,实现上肢康复训练机器人镜像运动。
1 方法
1.1 健肢运动信息检测
使用Kinect 2.0 检测人体上肢运动轨迹。在进行机器人控制时,需利用上肢相关关节角度进行轨迹规划。采用空间向量法计算关节角度。图1 为计算关节角度所需的骨骼点示意。

图1 骨骼点示意。(a)正视图;(b)右视图Fig.1 Skeletal point diagram.(a)Front view;(b)Right view
患者在坐姿下进行康复训练时,Kinect 2.0 被置于患者左前方,S2不会被遮挡,三维坐标较为稳定,不会产生较大误差,则以S1、S2、S3组成的平面作为基准平面。设面S1S2S3的两个向量分别为
S1S2和S2S3
则面S1S2S3的法向量为

Kinect 2.0 能够检测人体上肢相关骨骼点的坐标,由骨骼点坐标可得到计算所需的向量。设n的方向向量为(a1,b1,c1,),S3E1的方向向量为(a2,b2,c2),则由空间向量夹角余弦公式计算得到肩关节屈曲/伸展运动角度为

同理,肩关节外展/内收运动的角度θ2和肘关节屈曲/伸展运动的角度θ3也能通过以上方法求得。
1.2 上肢运动信息处理
采集人体在坐姿下由Kinect 2.0 检测到的肩关节外展/内收运动关节角度信息,如图2所示。针对图2 数据中的错误点和波动点,提出一种带有趋势因子的限幅滤波方法。该方法利用康复训练时人体上肢运动较慢,传感器每一帧检测到的关节角度增量较接近的特点,对每一帧检测到的数据进行判断,如果有角度增量过大的点,就判断此点是错误点,剔除该错误点,并用通过人体运动趋势计算出的点代替该错误点,具体流程如图3所示,其中A=θ2-θ1,B=θ3-θ2,AB=0.4A+0.6B,C=θ4-θ3,D=为剔除关节角度数据中的波动点,利用滑动平均滤波方法对数据做进一步处理。
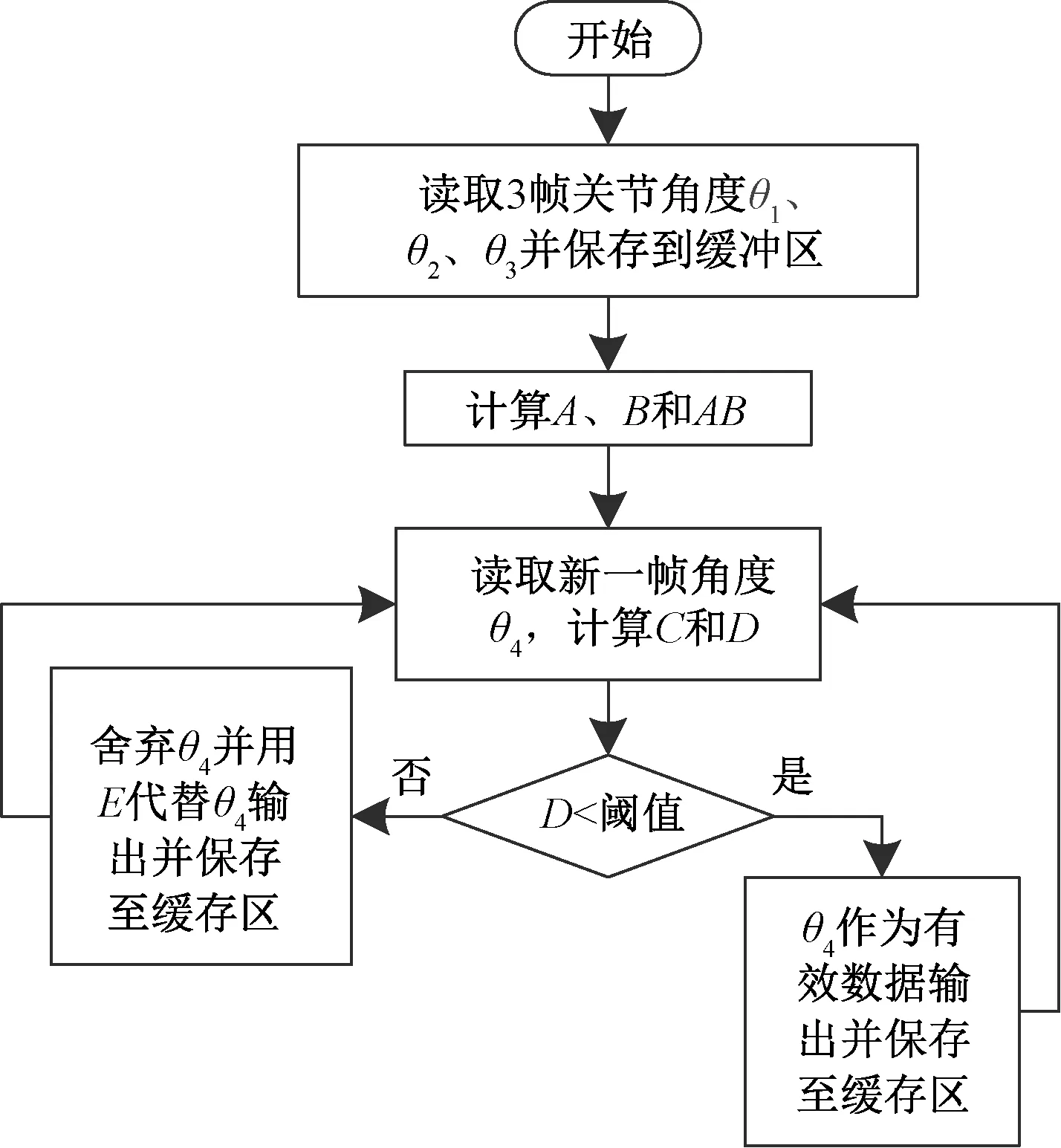
图3 带有趋势因子的限幅滤波方法流程Fig.3 Flow chart of limiting filter method with trend factor
1.3 运动信息处理效果
将图2 中的关节角度数据依次利用带有趋势因子的限幅滤波方法和滑动平均滤波方法进行处理,效果如图4所示。由图4 可见,利用以上两种滤波方法处理后的关节角度曲线更加光滑。数据处理过程虽然会对数据采集的实时性产生一定影响,但能够为后续轨迹规划提供良好基础。
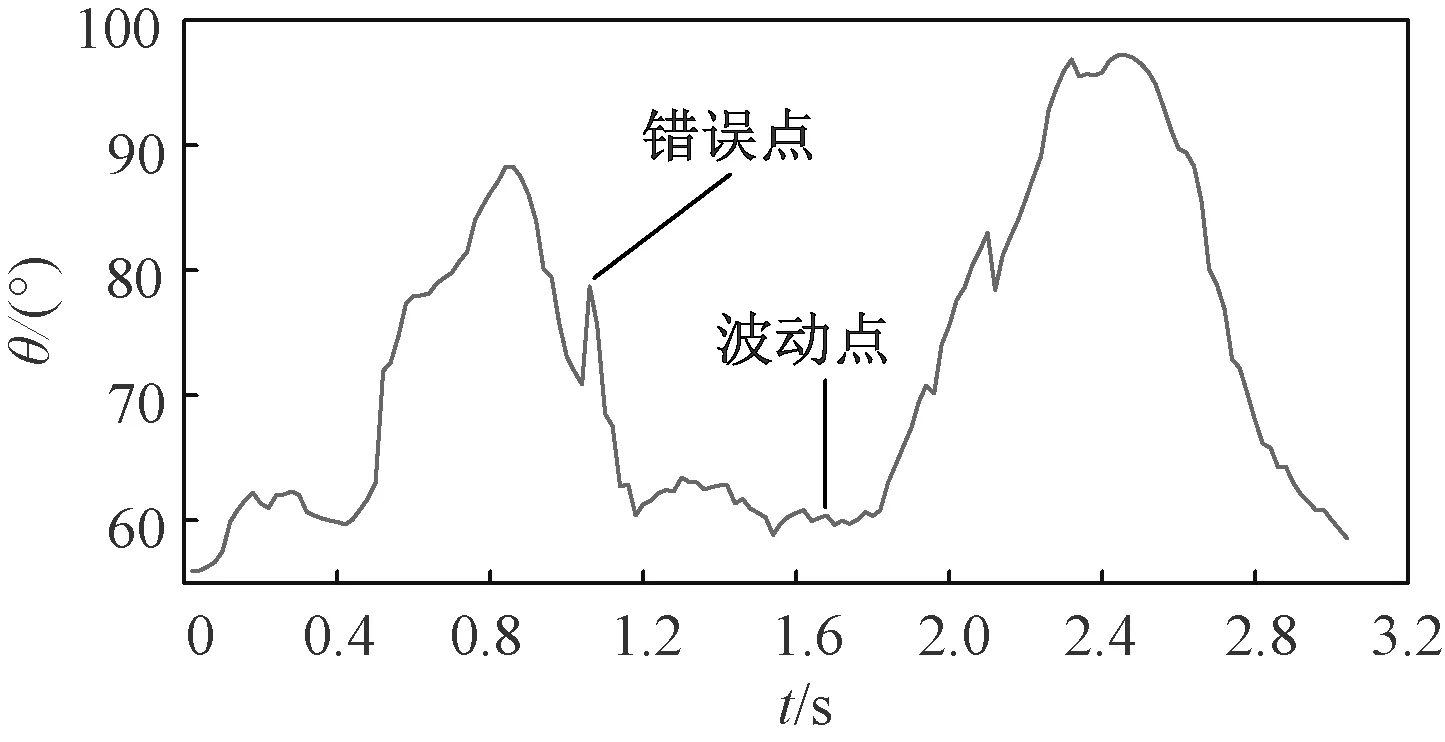
图2 肩关节外展/内收角度变化曲线Fig.2 Curve of abduction and adduction angle of shoulder joint

图4 趋势因子限幅滤波和滑动平均滤波Fig.4 Trend factor limiting filter and moving average filter
1.4 患肢轨迹规划算法
镜像运动需要实时进行轨迹规划,即每采集一个位置点进行一次轨迹规划,在此过程中既要保证运行的平稳性,又要兼顾实时性。本研究提出基于Bezier 曲线的轨迹规划算法,在线进行轨迹规划,实时控制机器人完成镜像运动。
一段n次Bezier 曲线的表达式为

式中,t为位置参数,Pi为曲线控制点。
以规划连续两段轨迹为例,具体方法如下:
设θn、θn+1、θn+2分别为轨迹规划器在第n、n+1、n+2 个时间T提取到的关节角度值,两段连续轨迹有3 个位置点,则θn、θn+1、θn+2分别作为第n段和第n+1 段四阶Bezier 轨迹的3 个位置点。其中第n段轨迹段终点θn+1同时作为第n+1 段轨迹段的起点。四阶Bezier 曲线公式为

由上述方法得到第n段和第n+1 段的四阶Bezier 轨迹方程分别为

式(5)和(6)控制点Pij中,i代表第i段轨迹,j为第i段轨迹的中间3 个控制点次序,j =1、2、3。
因为Pn(1)=Pn+1(0)=θn+1,所以两段轨迹是连续的,为了使两段轨迹光滑连接,则需连接点处的导数相等。第n段四阶Bezier 轨迹关于t的导数为

第n+1 段四阶Bezier 轨迹关于t的导数为

为了使轨迹光滑可导,必须满足
P′n(1)=P′(n+1)(0)
最终得出两段连续轨迹的连续、可导条件为

利用连续可导条件已经将Pn1计算出来,需要再计算Pn2和Pn3的值。机器人关节空间轨迹规划就是要找到关节角度与时间的函数关系。将四阶Bezier 曲线公式分解为二维平面坐标形式为

式(10)用以规划运动时间,式(11)用以规划运动角度。时间与控制点对应关系如表1所示。其中,θn、θn+1都已知,Pn1可由式(9)计算得到,则轨迹就可以通过Pn2和Pn3控制。令Pn1、Pn2、Pn3与θn+1位于同一条直线上,那么任意两点连线的斜率相等,有

表1 四阶Bezier 曲线控制点Tab.1 Fourth-order Bezier curve control points
可得

1.5 电机控制量计算
所设计的系统,每个关节运动相互独立,电机控制量采用相同的计算方法。假设图5所示的曲线为应用Bezier 曲线轨迹生成算法生成的轨迹。其中,A,B 点为Kinect 2.0 检测到的两个相邻位置点,采用等时间间隔的方法,将此轨迹分为若干段,每段电机运行速度为:
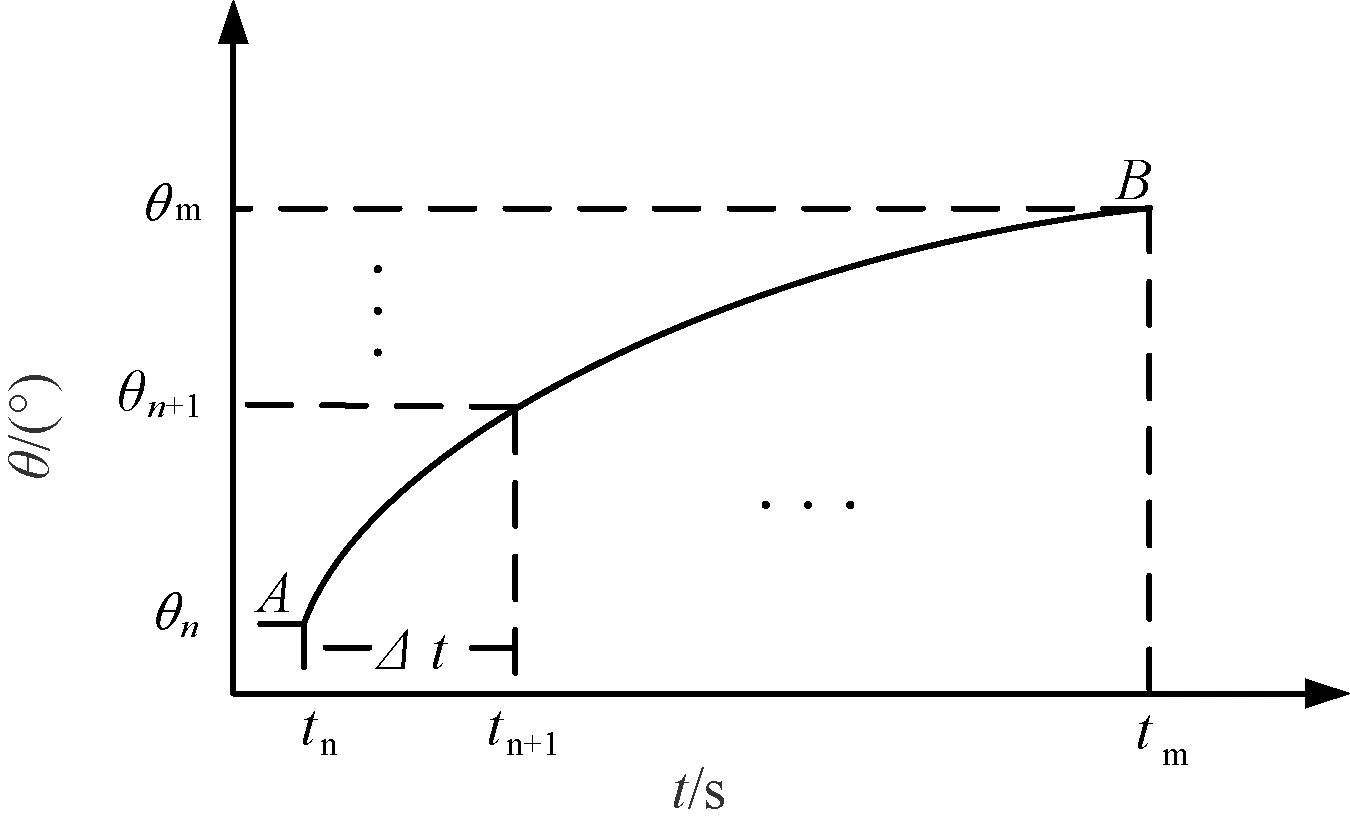
图5 控制量计算Fig.5 Control quantity calculation

根据控制程序运行时间,设定Δt值。
1.6 镜像运动控制方法
镜像运动控制流程如图6所示。康复机器人系统中运动检测装置用以获取健肢的运动信息,控制系统完成信息处理、镜像运动轨迹规划和控制信息输出等功能,康复训练装置用以带动患肢运动。由Kinect2.0 检测关节角度数据,控制系统每隔时间T读取一帧经处理的关节角度值,判断此帧角度与前一帧角度的关系,如果两帧角度差小于等于零,则电机正转,否则反转。获得电机的转动方向后,进行轨迹规划。

图6 镜像运动控制流程Fig.6 Flow chart of mirror motion control
1.7 镜像运动试验方法
为验证所提出镜像运动实现方法的可行性,研制了三自由度上肢康复训练机器人试验平台,可带动患肢(右臂)实现肩关节的外展/内收、屈曲/伸展运动,肘关节的屈曲/伸展运动,如图7所示。试验时,将康复训练机器人连接于试验者右臂(模拟患肢),Kinect 2.0 放置于试验者左前方2 m 处,试验者左臂(模拟健肢)做肘关节屈曲/伸展、肩关节外展/内收、肩关节屈曲/伸展动作。Kinect 2.0 采集关节运动信息,经过滤波处理后输入到轨迹规划器,由轨迹规划器实时规划出轨迹,并生成控制信号,控制机器人带动试验者右臂进行镜像运动。

图7 镜像运动试验Fig.7 Mirror motion test
2 结果
依据所设计的试验流程,完成3 个关节的运动角位移曲线(图8 中第1 行)可知,在机器人带动人体关节运动时,轨迹平滑,运行平稳。由机器人3 个关节的运动速度曲线图(图8 中第2 行)和加速度曲线图(图8 中第3 行)可知,机器人运动速度连续、可导,加速度连续,没有柔性冲击和刚性冲击现象,能够保证康复训练运动的平稳性。
比较图8 中人体上肢3 个关节角位移和康复装置角位移可知,由机器人带动的患肢各关节运动均有一定滞后,试验结果中的滞后时间为控制系统获取Kinect 2.0 的运动数据至输出电机控制量的时间,即控制程序的运行时间,约为350 ms。总滞后时间还应包括健肢产生运动至Kinect 2.0 输出运动数据的时间以及控制系统输出控制指令至电机带动患肢运动的时间,此两项时间虽无法准确获取,但是相对较短,试验结果说明所提出的镜像运动方法具有较好的实时性。

图8 各关节电机运动数据(每列上为角位移,中为机器人关节运动速度,下为机器人关节运动加速度)。(a)肘关节屈曲/伸展;(b)肩关节外展/内收;(c)肩关节屈曲/伸展Fig.8 Motor motion data of each joint(the upper graph of each column is the angular displacement, the middle graph is the velocity of the robot joint, and the lower graph is the acceleration of the robot joint).(a)Elbow flexion /extension;(b)Abduction/adduction of shoulder joint;(c)Shoulder flexion /extension
3 结论
所提出的上肢康复训练机器人镜像运动实现方法,可实现由患者健肢带动患肢进行镜像康复训练,患者无需穿戴任何人体运动轨迹检测设备。所提出的带有趋势因子的限幅滤波方法能够有效滤除错误点,能够保证数据的完整性和实时性。所提出的基于Bezier 曲线轨迹规划算法能够实现镜像运动的速度连续可导、加速度连续。试验结果显示,患肢镜像运动速度连续无突变,平稳性较好;患肢各关节运动相对于健肢运动存在一定滞后,但滞后时间较短,所提出的方法具有较好的实时性。控制程序的运行时间为滞后时间的主要部分,后期可以通过改善控制程序结构、提升控制系统硬件水平来减少此部分时间。
猜你喜欢
中华骨与关节外科杂志(2022年1期)2022-08-31 09:19:58
当代党员(2020年20期)2020-11-06 04:17:52
浙江临床医学(2020年9期)2020-10-10 02:16:42
测控技术(2018年6期)2018-11-25 09:50:08
小康(2018年23期)2018-08-23 06:18:52
中国自行车(2018年4期)2018-05-26 09:01:53
天津护理(2016年3期)2016-12-01 05:39:59
中国民族医药杂志(2016年7期)2016-05-09 07:49:09
实用手外科杂志(2015年2期)2015-08-28 09:50:58
小康(2015年4期)2015-03-31 14:57:40