三种多系统开源PPP软件性能比较与分析
2021-05-17 10:34王何鹏
大地测量与地球动力学 2021年5期
王何鹏 郭 杭 黄 聪
1 南昌大学信息工程学院,南昌市学府大道999号,330031
精密单点定位(PPP)是一种使用单台接收机就可实现高精度定位的方法,广泛应用于低轨卫星精密定轨、地壳形变监测、GNSS气象学、高精度静态或动态定位等领域。多系统融合的GNSS精密单点定位方法已成为当前的趋势,可有效提高定位精度和收敛速度[1-8]。
随着PPP技术的快速发展,国内外已有大量科研机构和个人开发出许多支持PPP处理的软件工具,大致可分为4类:大型科研软件、商业软件、在线服务系统和开源软件[9-10]。大型科研软件如P3、PANDA、Bernese等功能强大,但学习难度大且不对普通用户开放;商业软件如GrafNav等价格昂贵,源码不公开;在线服务系统如APPS、GAPS、CSRS-PPP和magicGNSS等使用简单,无需付费,但源码也不对用户开放,且大部分在线服务系统均不支持多系统处理[11-12]。开源PPP软件具有源码公开、免费、使用简单、所有用户都能使用等优点,非常适合广大科研人员、工程应用人员进行学习以及进一步开发,因此对开源PPP软件的运用以及开发具有重要价值和意义。目前已经有大量开源PPP软件可供用户使用,如PPPH、MG-APP、GAMP、GPSTk、PRIDE PPP-AR、RTKLIB等,但并非所有开源PPP软件都支持多系统卫星联合定位,且目前对不同开源软件性能比较研究的文献较少。本文对PPPH、MG-APP、GAMP三种可处理多系统联合定位的开源PPP软件进行比较与分析,对比3个软件的特点,并分析其处理GPS+GLONASS+BDS+Galileo多系统和GPS单系统PPP的定位精度、收敛时间和对流层延迟。
1 三种开源软件特性比较
由于不同的开源软件具有不同的数据处理特点和功能,用户在使用之前不仅要考虑其定位精度,还应关注软件支持的操作系统、运行环境、操作界面、处理模型、输出结果类型等因素,然后根据需求选择对应的开源软件。
PPPH是在MATLAB下运行的多系统开源PPP软件,MG-APP是基于跨平台Qt框架的C++语言下的多系统开源PPP软件,GAMP是在RTKLIB基础上开发的多系统开源PPP软件[13-15]。表1为PPPH、MG-APP、GAMP三种软件的主要特征比较,可以看出,3种软件均能在Windows、Mac、Linux等操作系统下运行,且能支持多种卫星系统,可极大方便用户使用。PPPH和MG-APP均拥有用户友好的图形操作界面,相比于GAMP更容易学习和使用。GAMP比PPPH和MG-APP多了非差非组合的PPP模型,可方便用户对比研究不同PPP模型函数。MG-APP和GAMP比PPPH具有更多的对流层改正模型,可方便用户比较不同对流层模型对定位结果的影响。
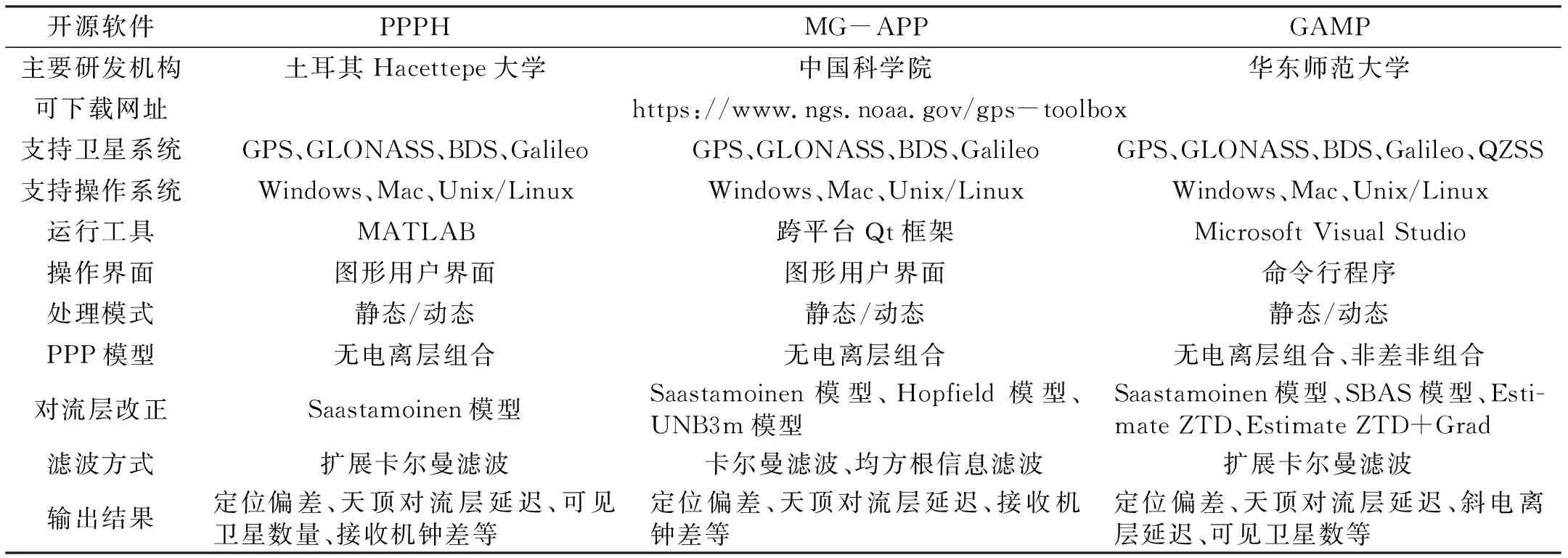
表1 3种开源软件主要特征比较
2 数据处理与分析
2.1 实验方案与数据处理策略
实验数据选取全球多系统定位服务实验网(MGEX)中6个测站(AREG、JFNG、REUN、WROC、NNOR、YEL2)2018-09-13~2018-09-19和2019-01-05~2019-01-11共14 d的观测数据,数据采样率为30 s。
利用PPPH、MG-APP、GAMP三款开源软件分别对GPS单系统、GPS+GLONASS+BDS+Galileo(以下简称GRCE)多系统进行静态/动态PPP解算,并分析不同软件解算的定位精度、收敛时间以及对流层ZTD。表2为3个软件具体的数据处理策略,精密轨道、精密钟差等精密产品均由IGS各分析中心提供,PPPH和GAMP使用CODE发布的5 min精密轨道和30 s精密钟差,由于MG-APP可自动选择和下载精密产品,因此不作说明。
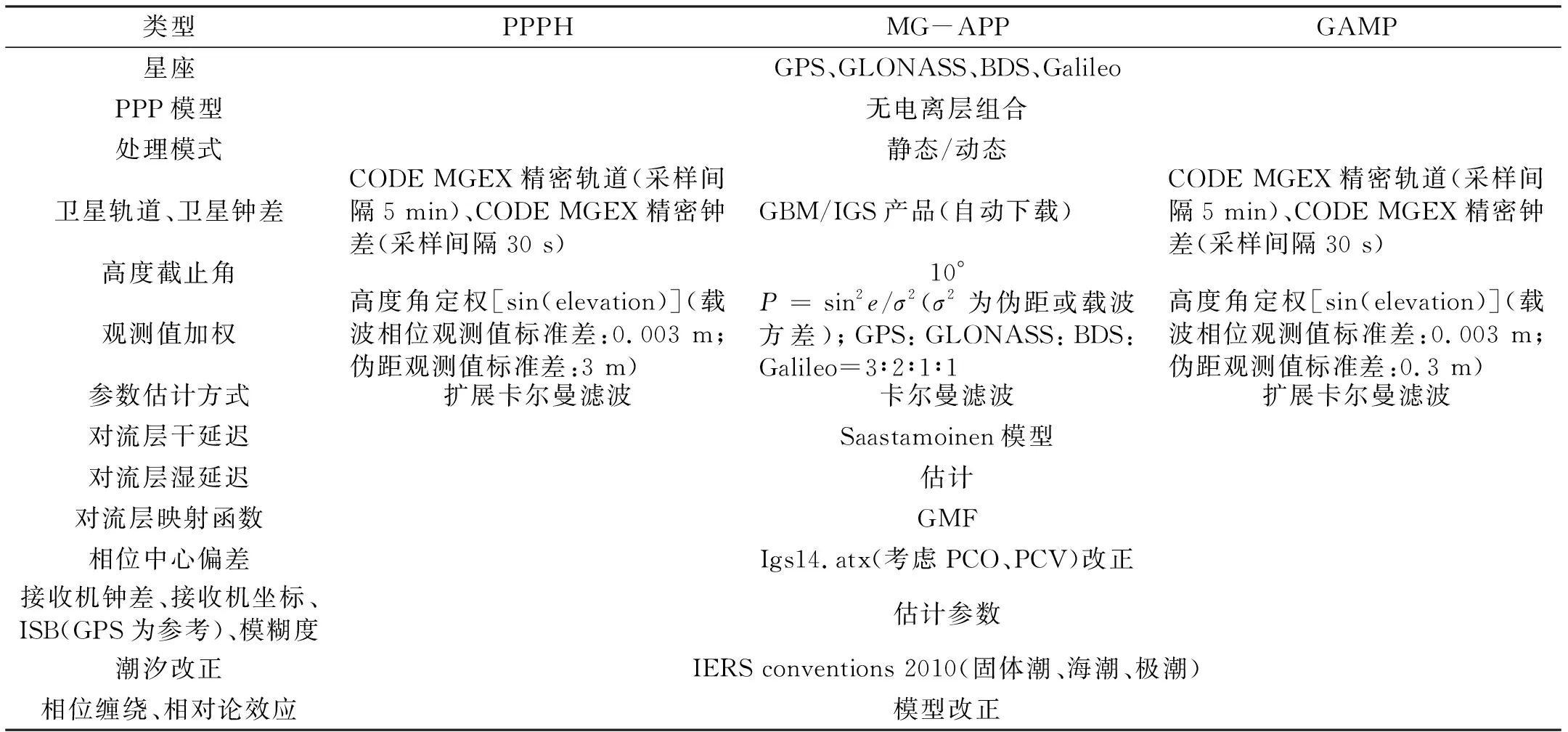
表2 3种开源软件数据处理策略
2.2 静态PPP定位精度和收敛性分析
为分析3种软件处理GPS单系统和GRCE多系统的定位精度和收敛时间,本文使用IGS提供的SINEX文件中的坐标作为参考值,并以N、E、U三个方向定位偏差均收敛至1 dm的时间定义为收敛时间。图1和图2为2019-01-05 AREG站GPS单系统和GRCE多系统静态PPP解算结果,为方便比较,图中仅显示前6 h结果。可以看出,3个软件解算的GRCE多系统的定位精度和收敛时间比GPS单系统均有所改善,MG-APP相比于PPPH和GAMP在收敛时间上更短。表3和表4分别为2018-09-13~2018-09-19期间和2019-01-05~2019-01-11期间3个软件解算的6个测站GPS单系统和GRCE多系统静态PPP两周定位误差RMS和收敛时间平均值,可以看出,U方向精度最差,且3个软件解算的GPS单系统和GRCE多系统精密单点定位结果在平面上优于1 cm,高程上优于2 cm;MG-APP和GAMP解算的定位精度相当而PPPH略差,3个软件解算的多系统精密单点定位精度均优于GPS单系统;PPPH、MG-APP、GAMP解算的GPS单系统PPP收敛时间分别约为30.5 min、28.6 min、29.2 min,GRCE多系统PPP收敛时间分别约为18.7 min、17.1 min、17.6 min。PPPH、MG-APP、GAMP解算的GRCE多系统收敛时间比GPS单系统分别改善约38.7%、40.2%、39.7%,极大地缩短了定位的收敛时间。
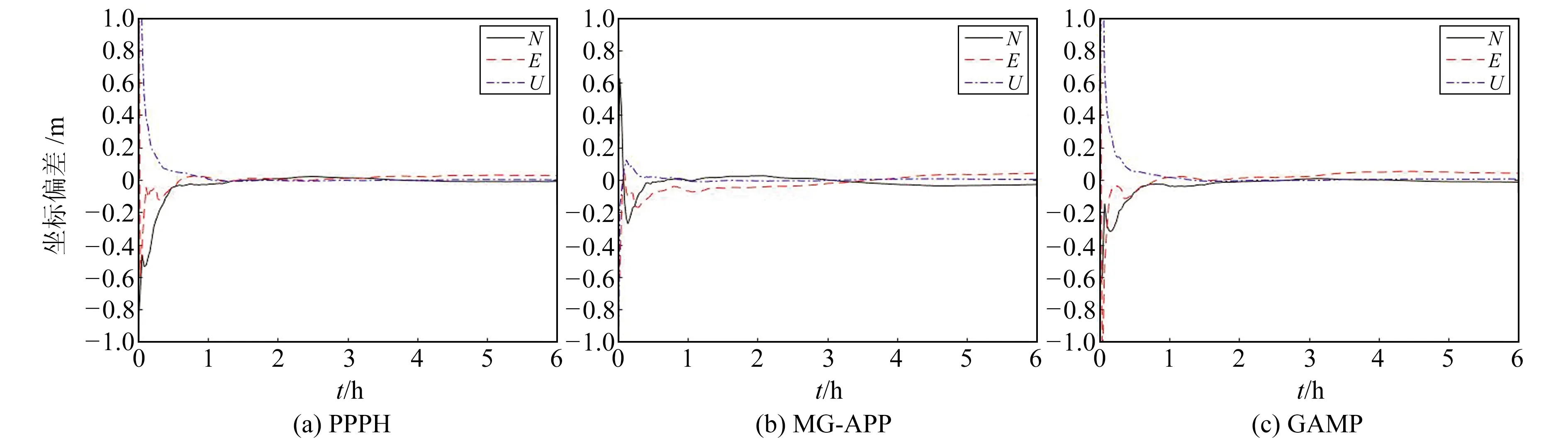
图1 3种软件解算的AREG站GPS单系统静态PPP误差Fig.1 GPS static PPP error of AREG station solved by three kinds of software
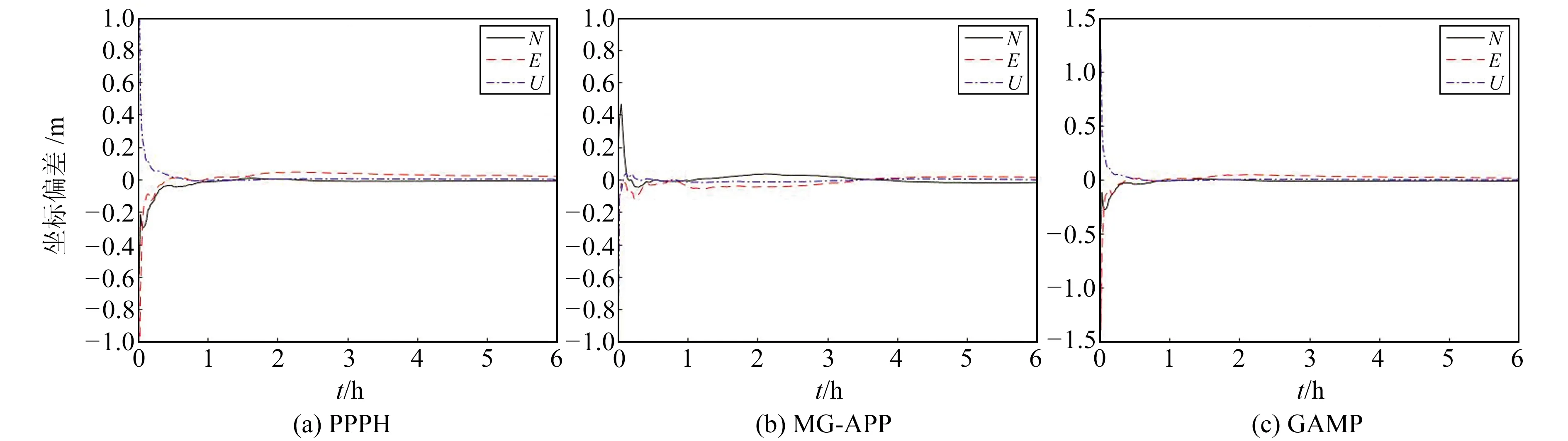
图2 3种软件解算的AREG站GRCE多系统静态PPP误差Fig.2 GRCE static PPP error of AREG station solved by three kinds of software
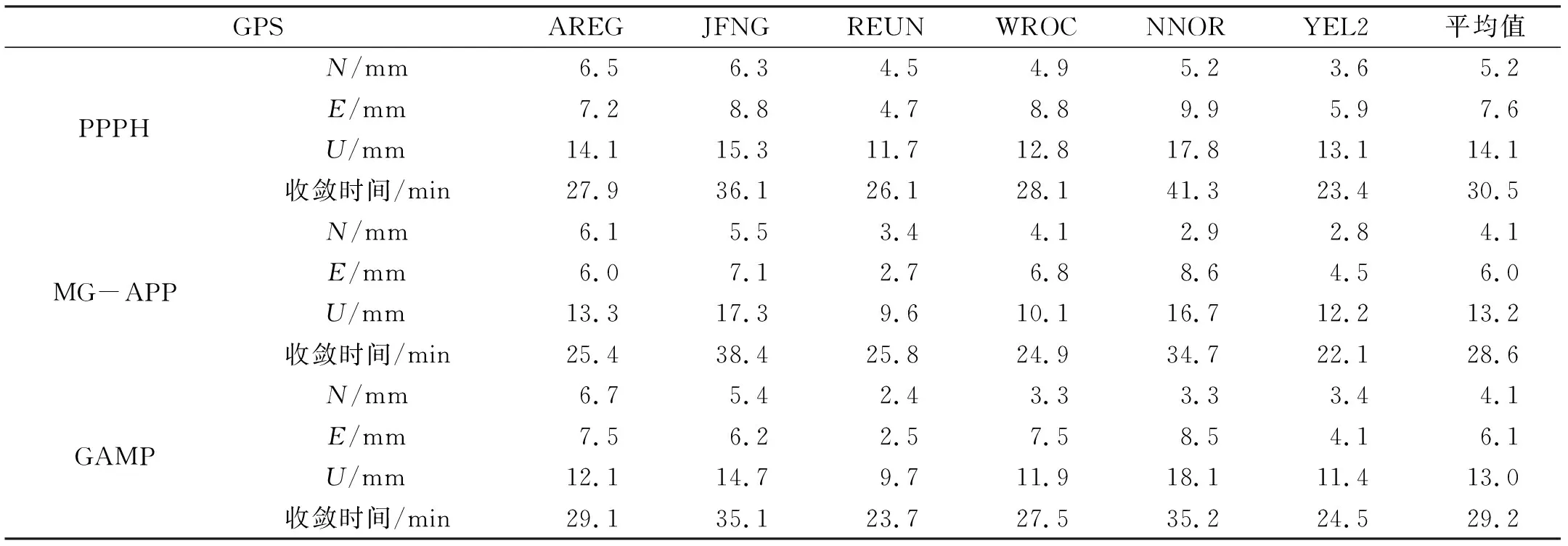
表3 6个测站GPS静态PPP两周定位误差RMS值与收敛时间
2.3 动态PPP定位精度分析
采用§2.1中数据处理策略和实验数据进行分析,使用3种软件对各个测站进行GPS和GRCE两种模式的动态精密单点定位。图3为3种软件解算的2种模式2周定位误差RMS平均值,可以看出,3个软件解算的GPS动态精密单点定位在平面上优于2 cm、高程上优于5 cm;GRCE动态精密单点定位在平面上优于2 cm、高程上优于3 cm,GRCE动态精密单点定位精度优于GPS单系统。
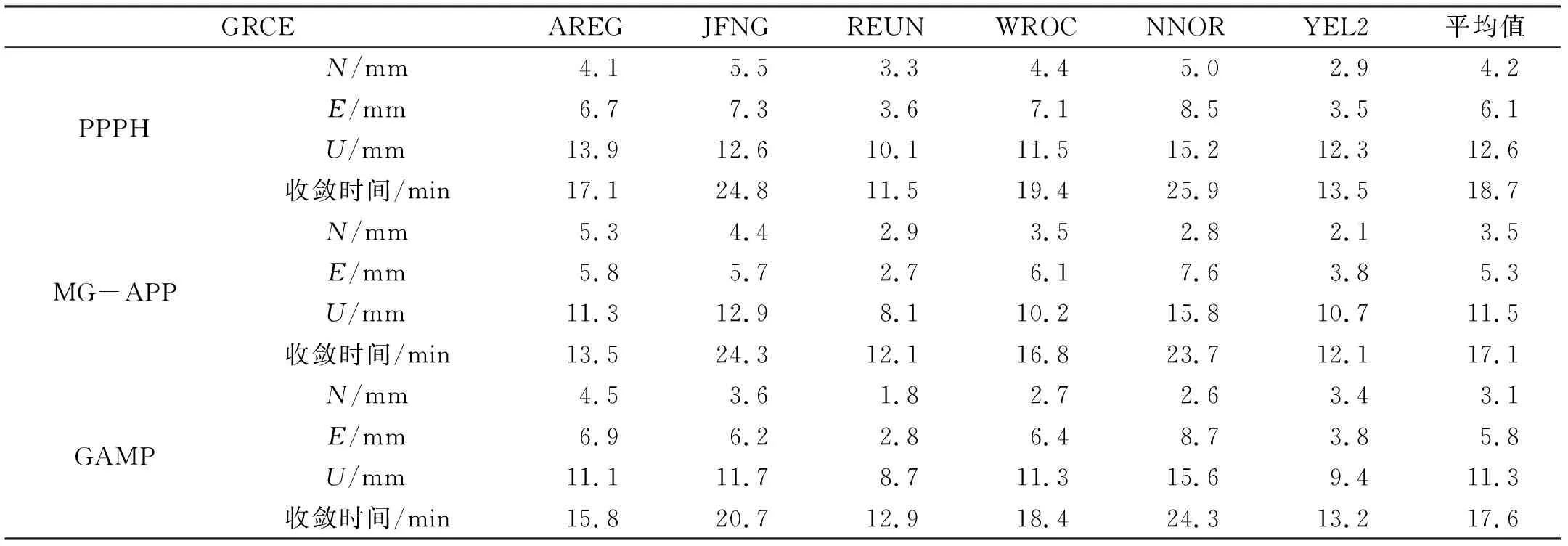
表4 6个测站GRCE静态PPP两周定位误差RMS值与收敛时间
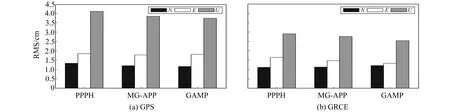
图3 2种模式2周定位误差RMS平均值Fig.3 RMS mean value of positioning error in two weeks under two modes
2.4 对流层精度分析
对流层延迟是精密单点定位的重要误差源,同时对研究水汽变化从而预报降水也具有重要意义。PPP技术是获取ZTD产品的一种方式,因此对PPP解算的ZTD产品的精度与可靠性进行分析非常重要。为验证3个软件解算ZTD的精度,使用IGS发布的ZTD产品作为参考值来评估不同软件解算的GPS单系统和GRCE多系统ZTD精度。图4和图5为2019-01-05~ 2019-01-11(年积日5~11)AREG站和YEL2站软件解算的ZTD与IGS发布的ZTD差值的时间序列,可以看出,3个软件解算的GPS单系统和GRCE多系统ZTD差值绝大部分小于2 cm,与IGS发布的ZTD具有很高的一致性,均能满足ZTD精度要求,GAMP相比于PPPH和MG-APP解算的ZTD稳定性略高。
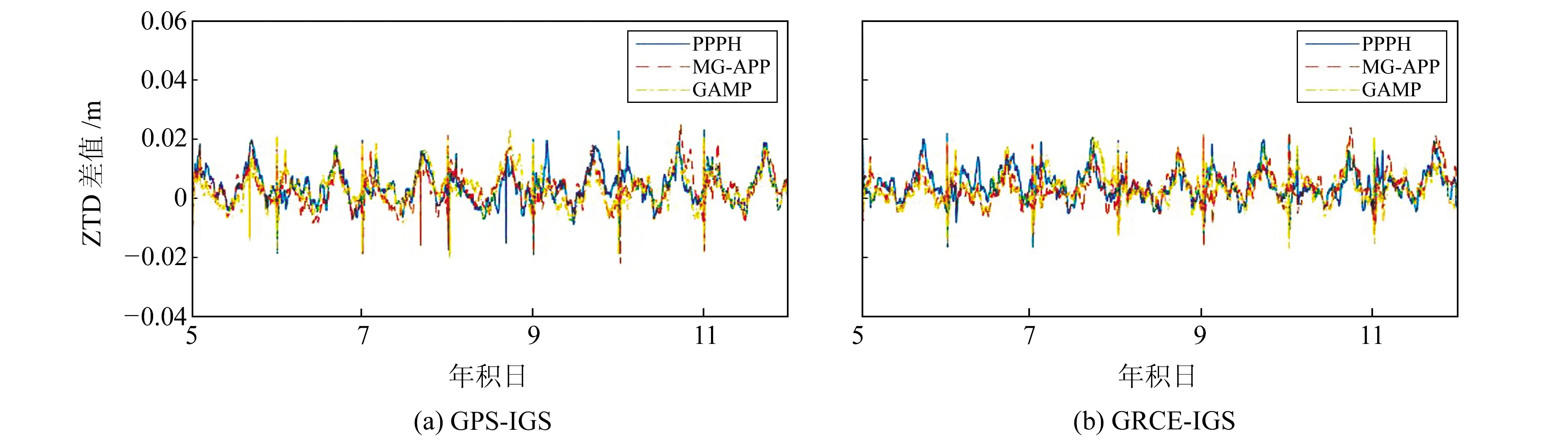
图4 3个软件解算的AREG站ZTD差值时间序列Fig.4 Time series of ZTD difference values of AREG station calculated by three software
图5 3个软件解算的YEL2站ZTD差值时间序列Fig.5 Time series of ZTD difference values of YEL2 station calculated by three software
3 结 语
通过比较分析PPPH、MG-APP、GAMP三种多系统开源PPP软件的性能,从软件特性、定位精度、收敛时间、对流层延迟等多个方面进行对比,得到以下结论:
1)3种软件均能在多种操作系统下运行,且能支持多种卫星系统,可极大地方便用户使用,MG-APP和GAMP相比于PPPH在数据处理策略和改正模型上更丰富。
2)3个软件解算的GRCE多系统的定位精度和收敛时间相比于GPS单系统均有所改善,MG-APP和GAMP解算的定位精度相当而PPPH略差。3个软件解算的GPS和GRCE静态精密单点定位在平面上优于1 cm,高程上优于2 cm;GPS动态精密单点定位在平面上优于2 cm,高程上优于5 cm;3个软件解算的GRCE动态精密单点定位在平面上优于2 cm,高程上优于3 cm。MG-APP相比于PPPH和GAMP收敛时间更短,PPPH、MG-APP、GAMP解算的GRCE多系统收敛时间比GPS单系统分别改善约38.7%、40.2%、39.7%,极大地缩短了定位的收敛时间。
3)3个软件解算的ZTD与IGS发布的ZTD具有很高一致性,均能满足ZTD精度要求,GAMP相比于PPPH和MG-APP解算的ZTD稳定性略高。
猜你喜欢
军事文摘(2023年4期)2023-04-05
区域治理(2021年14期)2021-08-11
中国惯性技术学报(2020年2期)2020-07-24
山东冶金(2019年5期)2019-11-16
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
载人航天(2016年4期)2016-12-01
山东工业技术(2016年15期)2016-12-01
成都信息工程大学学报(2016年6期)2016-06-01