
基于海豚听觉系统模型的水下目标识别
2021-05-15 08:41:36杨长生赵国贵
水下无人系统学报 2021年2期
周 卓, 梁 红, 杨长生, 赵国贵
基于海豚听觉系统模型的水下目标识别
周 卓, 梁 红, 杨长生, 赵国贵
(西北工业大学 航海学院, 陕西 西安, 710072)
从目标的主动声呐回波中提取其特征信息是实现水下目标分类识别的有效手段。动物声呐在水下目标识别中表现出的优异性能为人工声呐提供了解决方法。文中以宽吻海豚喀啦信号作为主动声呐的发射信号,分别利用小波变换和海豚听觉系统模型2种方法提取了目标回波特征并作为支持向量机的输入进行分类。将通过海豚听觉系统模型得到的时谱图作为卷积神经网络的输入, 对目标进行分类识别。研究表明, 相比于小波变换方法, 利用基于海豚听觉系统模型的特征提取方法进行目标分类识别的效果更好; 结合卷积神经网络, 采用海豚喀啦信号结合海豚听觉系统模型在水下目标识别中可以获得更好的结果。
海豚喀啦信号; 海豚听觉系统; 目标分类识别
0 引言
很多动物的体内都有天然的回声定位系统, 例如蝙蝠、鲸鱼和海豚等。研究表明, 具有回声定位能力的动物有很高的目标分辨能力, 例如宽吻海豚能够发现几百米外的鱼群, 还能识别出不同的鱼群种类, 甚至可以分辨出黄铜、铝及塑料等不同的物质材料, 因此可以将海豚声呐的良好特性应用到人工声呐中, 为当前的目标分类识别方法提供新的思路。
1947年, Arthur McBride首次提出大西洋宽吻海豚可以通过回声定位水下物体, 之后多位科学家对海豚声呐系统展开了研究, 最终得出海豚可由头部发出声音, 然后接收回来的信号并对其进行处理的结论[1]。进一步研究发现, 海豚不仅能够检测到目标, 甚至可分辨出猎物的形状及大小等。20世纪60年代之后, 有关学者利用宽吻海豚做了多组实验, 结果表明, 海豚能够准确地区分生物目标与人工目标, 对于相似的人工目标, 海豚甚至能够分辨出材料和厚度不同的金属盘及空心圆柱体等[2-3]。2007年, Branstetter等[4]通过总结之前的实验数据和结果, 提出一种海豚听觉系统模型, 来模拟海豚在回声定位过程中对不同目标之间的区分。国内相关研究起步较晚, 牛富强等[5-7]研究了海豚的发声信号, 发现海豚会根据生活环境改变发射信号, 并对不同环境下的海豚发声信号进行了研究。
目前, 基于海豚听觉系统的回声识别定位研究较少。基于水声目标特征的分类识别方法, 目前应用较为广泛的有统计分类方法和神经网络方法[8]。文中使用支持向量机对从目标回波中提取的小波能量谱峰值特征进行分类, 同时利用海豚听觉系统模型得到目标回波的强度特征以及“时谱图”, 并结合支持向量机和卷积神经网络对其分类, 有效地提高了分类识别率。
1 宽吻海豚声呐系统
1.1 宽吻海豚发声信号
一般将宽吻海豚的声音分成喀啦声(click)、哨声(whistles)和突发脉冲(burst pulses)3种。其中, 在完成定位和探测任务时主要使用的是喀啦声信号。文献[9]提到了1个宽吻海豚喀啦信号模型, 该模型由2个高斯包络的负调频线性调频(linear frequency modulation, LFM)信号叠加构成, 信号的表达式为
表1给出了3种海豚喀啦(dolphin click, DC)信号的参数设置(DC1、DC2、DC6)[9], 其中信号时长0.6 ms, 高频分量相对于低频分量延迟0.1 ms。
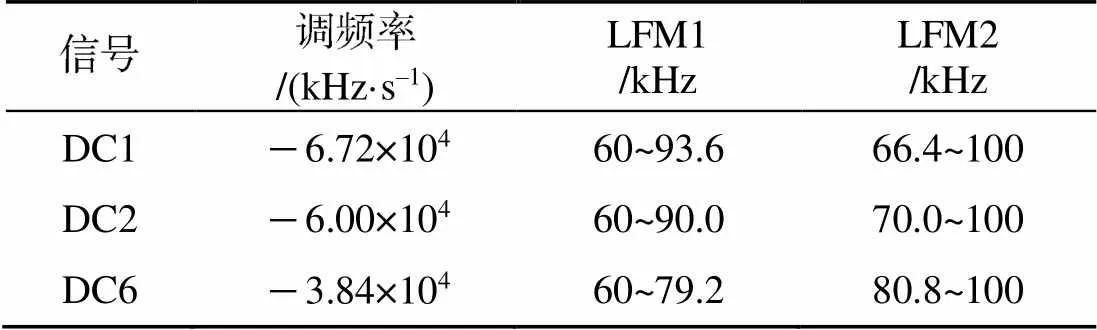
表1 DC信号参数
1.2 海豚听觉系统模型
海豚声呐的接收系统就是它的听觉系统, 包括外耳、中耳和内耳。不同于其他的哺乳动物, 海豚和一些鲸类没有耳廓, 外耳道也不容易看见。在大多数海豚中, 外耳就像是1个针孔, 它的一部分由纤维组织组成, 这种具有狭窄横截面和纤维结构的外耳道几乎不能通过鼓膜韧带成为中耳和内耳的声学通路。目前通常认为海豚的外耳道是非功能性的, 声音通过下颌骨的后半部分进入海豚的头部, 然后经过1个充满脂肪的管道传播到包含中耳和内耳的鼓膜骨室中。
文献[4]中提到了1种海豚听觉系统模型, 描述海豚在回声定位识别任务中如何表示和使用多种识别线索。该模型由一组Gammatone带通滤波器、半波整流器和低通滤波器组成。
1)Gammatone滤波器
Gammatone滤波器的脉冲响应可以表示为



2)半波整流器
半波整流的过程可以描述为
3)低通滤波器
低通滤波器脉冲响应
低通滤波器的输出
该输出融合了海豚听觉神经元的低通滤波特性, 由于该输出包含时间和频率下的特征, 因此称为“时谱图”。与常规的频谱图相比, 该模型能够更加真实地描述海豚接收到的声音。
2 回波特征提取仿真分析
声诱饵、无人水下航行器(unmanned undersea vehicle, UUV)和水下悬浮物等均为常见的水下小目标, 分别执行水下干扰、探测及打击等多项任务。这些水下小目标对舰艇和海洋设施的威胁很大且难以分辨, 因此需要对其进行精确识别。文中利用亮点模型仿真了声诱饵、UUV和水下悬浮物等3种目标的回波数据, 并利用小波变换和海豚听觉系统模型对回波完成了特征提取。
2.1 发射信号
仿真时选取的发射信号为LFM和DC信号。LFM是水下目标识别中常用的发射信号, DC信号模拟海豚发声方式。其中: LFM信号的频带范围为60~100 kHz, 信号脉冲长度为0.6 ms; DC信号的频带范围选取同表1, 脉冲长度均为0.6 ms。
2.2 目标亮点模型

2.3 特征提取方法
1)小波变换
小波变换的定义如下

式中:为内积; 称为母小波;为尺度因子, 由经过伸缩平移运算得到; 为位移因子。
信号的尺度-小波能量谱定义为
在特征提取过程中, 主要利用信号的尺度-小波能量谱峰值作为目标的特征。
2) 海豚听觉系统模型
上文介绍了海豚听觉系统的构造, 并给出了海豚听觉系统模型。回波信号通过该模型后可以得到1个时谱图, 从中可提取出海豚在分辨水下目标时利用的感知特征。在目标识别中, 比较有用的一种特征是从强度模型(intensity model, IM)中提取出的IM特征。其定义为
2.4 仿真数据特征提取
以发射信号为DC1信号为例, 发射信号时域、频域图如图2所示。分别利用2种特征提取方法对3种目标的仿真回波进行特征提取, 结果如图3所示。图中的横坐标表示目标与入射信号的夹角, 纵坐标表示特征的幅值大小。
从图3可知, 利用信号的尺度-小波能量谱峰值和强度模型都可以完成对目标回波的特征提取, 目标的区分度均较高, 因此可以利用这2种特征完成对目标的分类识别。对比2幅图还可以发现: 2种方法下目标回波特征提取结果均是UUV的特征幅度较大, 水下悬浮物次之, 声诱饵最小; 利用强度模型提取到的特征幅值高于信号的尺度-小能量谱峰值特征, 由于发射信号为DC1信号, 这也从侧面验证了相比于小波变换方法, 海豚听觉系统模型更适合于对DC信号进行特征提取。
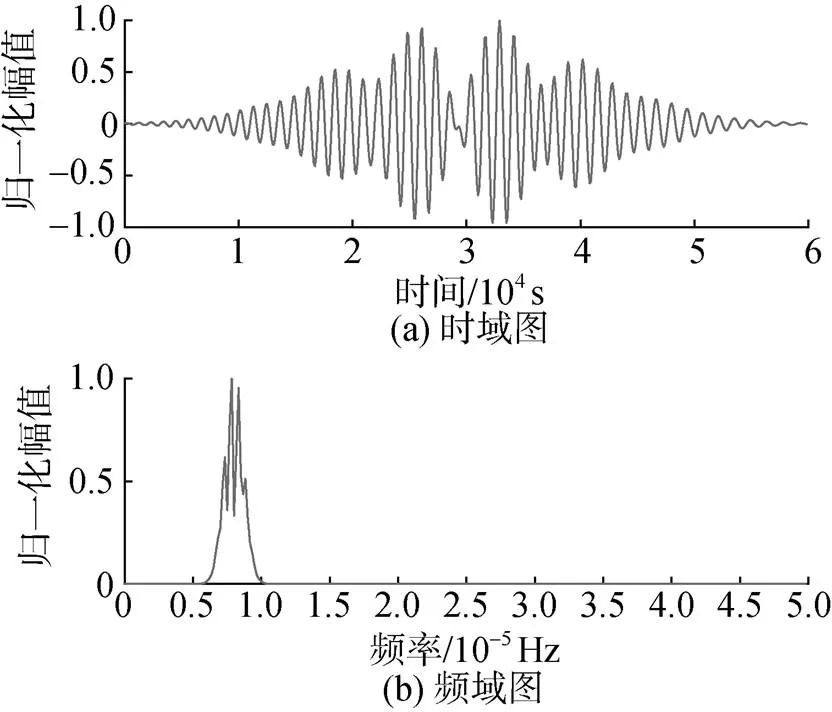
图2 DC1信号时域图和频域图
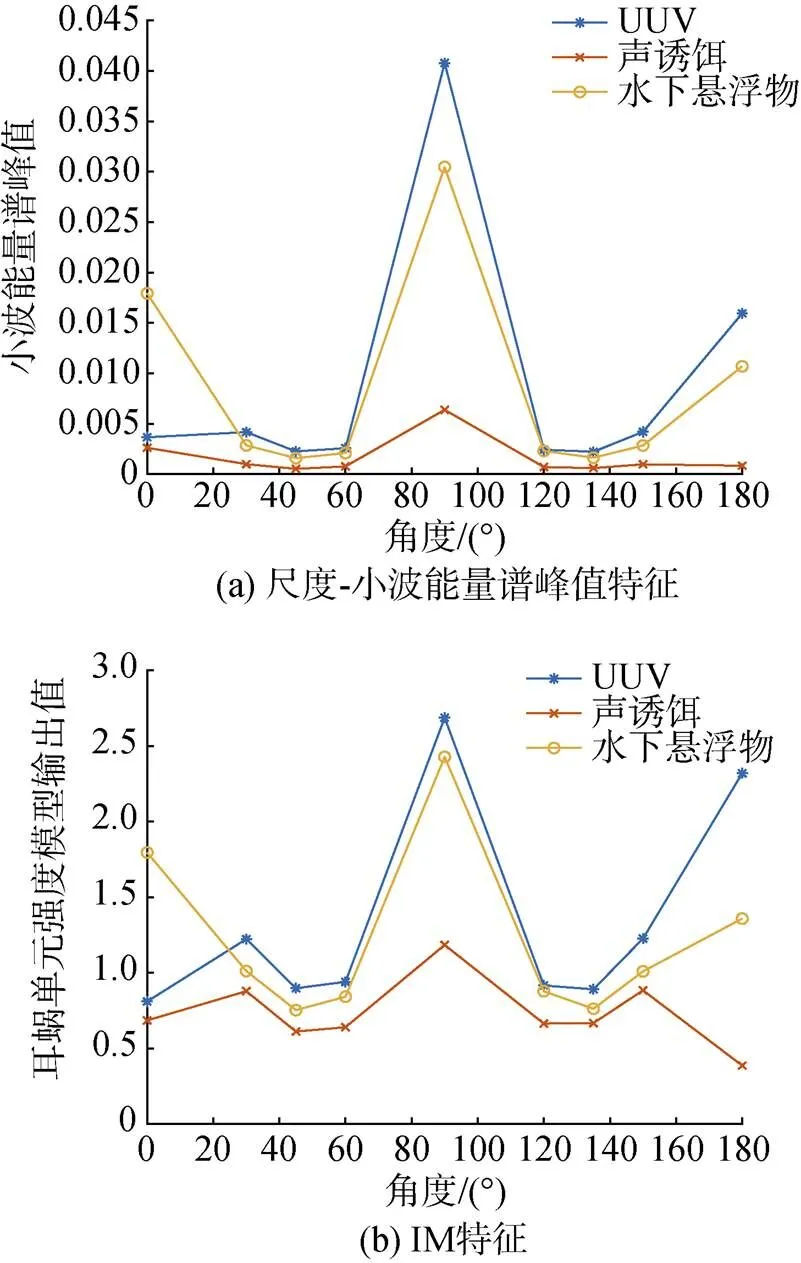
图3 仿真回波特征提取结果曲线
3 分类器设计
设计支持向量机和神经网络2种分类器, 其中支持向量机对从目标提取的小波能量谱峰值特征和通过海豚听觉系统模型得到的强度特征进行分类; 卷积神经网络对由海豚听觉系统模型得到的时谱图进行分类。
3.1 支持向量机
支持向量机是一种基于统计理论的机器学习方法, 可以利用有限的数据很好地平衡所需系统的复杂性和学习能力, 更好地运用到实际中, 增强了分类系统的鲁棒性, 在非线性样本的分类问题方面表现出了良好的应用价值[10]。
支持向量机利用非线性映射方法将输入信号映射到另一个空间中, 该空间一般是高维度的特征空间, 然后在该空间中求解出最优分类超平面。支持向量机中比较重要的概念是核函数, 文中在仿真中选取的是高斯核函数。


表2 支持向量机分类器识别率
3.2 卷积神经网络
海豚在接收到回波信息之后, 大脑可能会利用一种类似于神经网络的方式对回波的时谱信息进行分析, 并提取相应的特征来完成对目标的分类[11]。文中结合目前在水下目标识别领域应用较多的深度学习方法中[12], 选取卷积神经网络(con- volutional neurual network, CNN)来模拟海豚大脑对回波时谱信息的处理过程。CNN是深度学习的一种核心方法, 其构成一般包括输入层、卷积层、池化层和全连接层[13]。


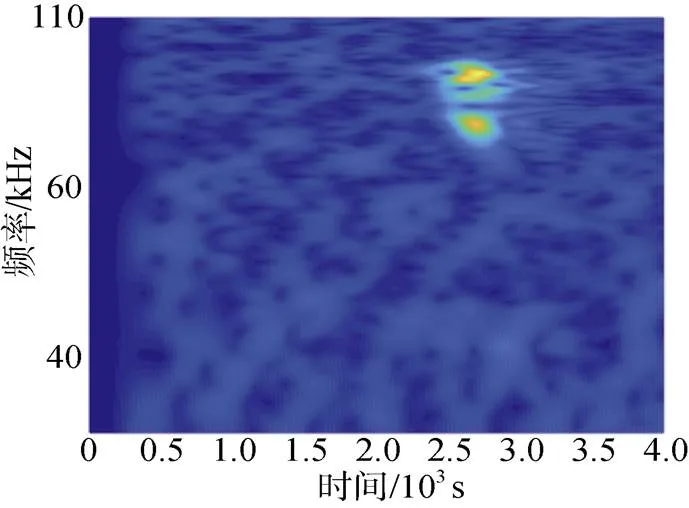
图4 声诱饵模型亮点回波时谱图
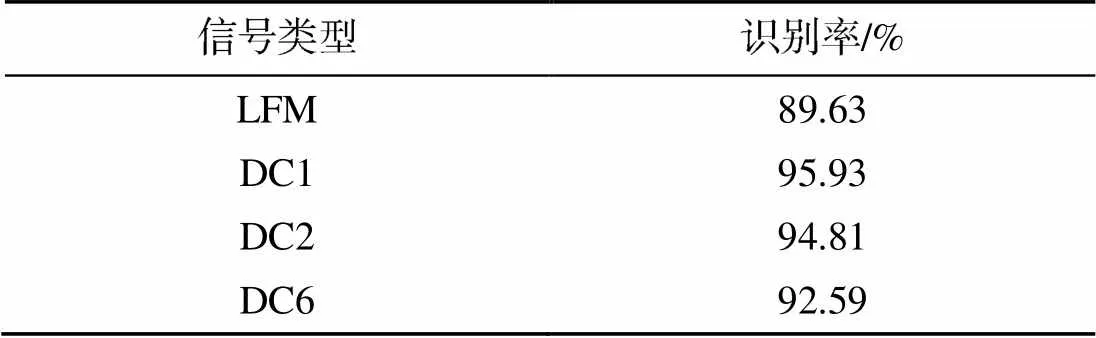
表3 CNN分类器识别率
3.3 水池实验
为了验证DC信号及海豚听觉系统模型的优越性, 设计水池实验, 对3种目标模型的回波特征提取并进行目标识别。实验系统示意图如图5所示。实验所用目标实物如图6所示。
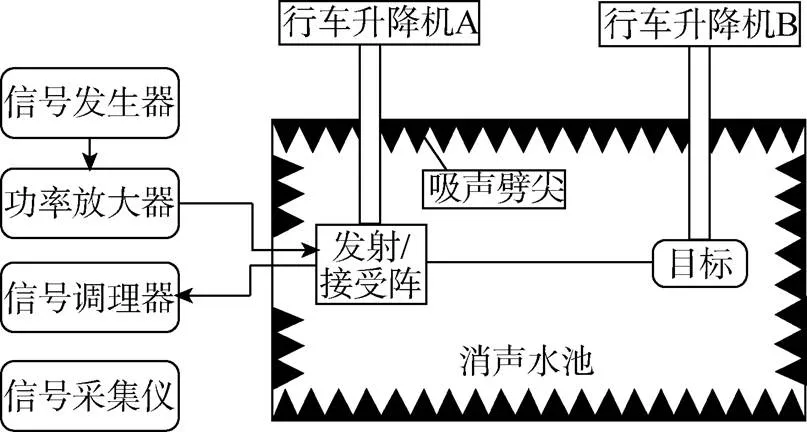
图5 实验系统示意图
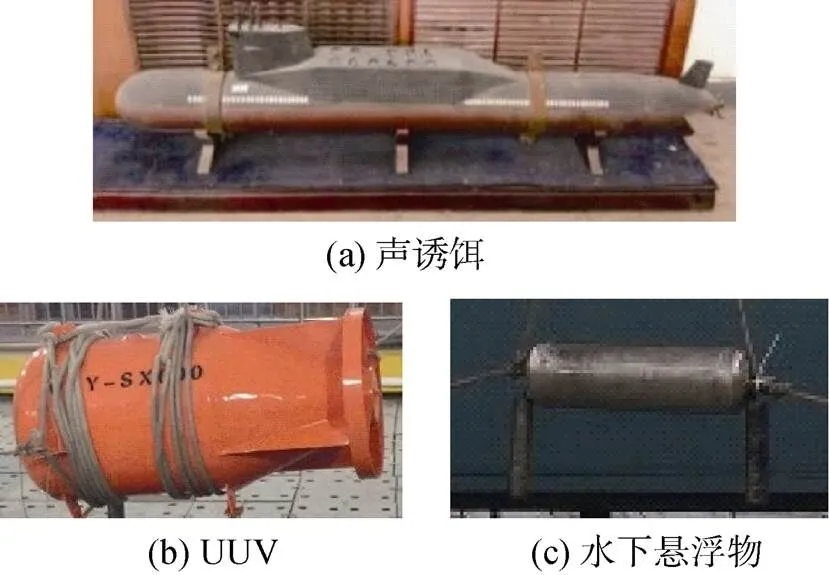
图6 实验目标实物图
3.4 结果分析
对比表2~表4的结果可知, 利用支持向量机和CNN分类器均可完成对目标的分类识别。使用支持向量机对目标进行分类识别时, 利用基于海豚听觉系统的IM模型提取的特征更有利于目标的分类识别, 相比于LFM信号, 在利用CD信号作为发射信号时, 目标的仿真识别率均可达90%以上, 实验识别率也处于80%左右, 这也说明海豚听觉系统模型在对CD信号产生的回波进行特征提取时有更好的适应性。
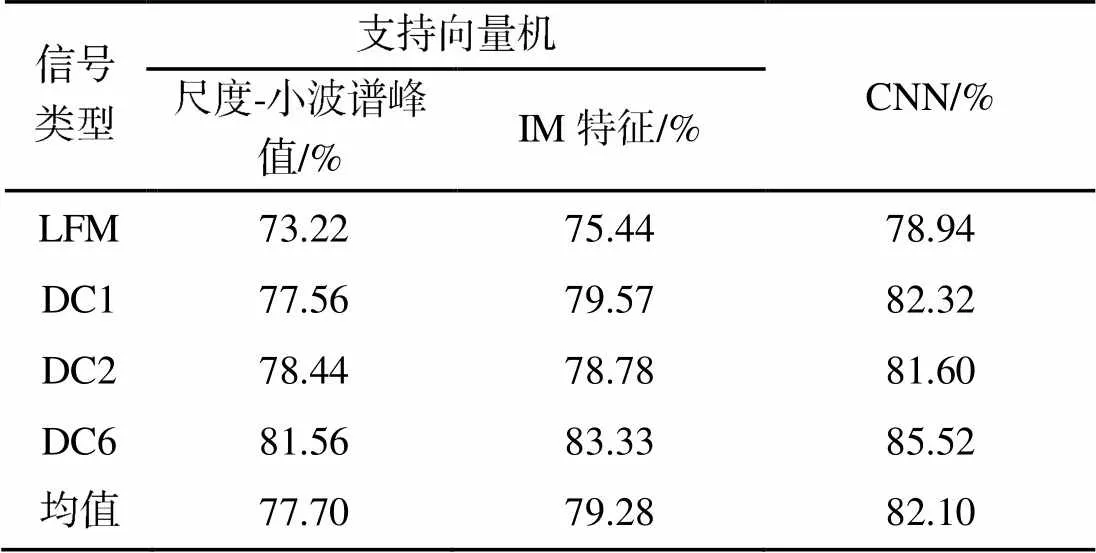
表4 实验处理结果中不同分类器的识别率
使用基于CNN的分类器对目标进行分类识别时, 利用海豚听觉系统模型得到的回波信号时谱图作为分类器的输入, 可以得到很好的结果: 目标的平均分类仿真识别率达到93.24%, 实验识别率达到80%以上, 相比于LFM信号, 在利用CD信号作为发射信号时, 得到的回波信号时谱图更有利于CNN分类器对目标的分类识别。
在发射信号不变时, 相比于支持向量机方法, 基于CNN的分类器目标分类效果更优, 目标的分类仿真识别率最高可达95.93%, 实验识别率达85.52%。但同时也要注意到, 由于CNN的参数相比支持向量机更多, 因此运算速度相对也会较慢, 这在实际应用中是需要考虑的因素。
4 结束语
文中基于海豚声呐系统结合支持向量机和CNN方法完成了对水下目标的分类识别。考虑到海豚在目标回声定位和分辨中的卓越能力, 利用CD信号, 结合海豚听觉系统模型提取了目标回波中的IM特征, 并对比传统的小波变换方法, 利用支持向量机完成了目标的分类识别。随后, 利用海豚听觉系统模型得到目标回波的时谱图, 结合CNN完成了目标的分类识别。最后, 进行水池实验验证了仿真结果。仿真结果表明, 利用海豚听觉系统模型得到的回波时谱图可以有效提高水下目标的分类识别率, 且当发射信号为CD信号时, 分类效果更好。未来将继续研究海豚大脑中的回波处理模型, 以期获得更好的目标分类识别结果。
[1] Au W W L, Scheifele P M. The Sonar of Dolphins[J]. The Journal of the Acoustical Society of America, 1993, 95(1): 585-586.
[2] Au W W L, Hastings M C. Principles of Marine Bio- acoustics[M]. New York : Springer US, 2008.
[3] Au W W L, Pawloski D A. Cylinder Wall Thickness Difference Discrimination by an Echolocating Atlantic Bottlenose Dolphin[J]. Journal of Comparative Physiology. A: Neuroethology, Sensory, Neural and Behavioral Physiology, 1992, 170(1): 41-47.
[4] Branstetter B K, Mercado E, Au W W L. Representing Multiple Discrimination Cues in a Computational Model of the Bottlenose Dolphin Auditory System[J]. The Jour- nal of the Acoustical Society of America, 2007, 122(4): 2459.
[5] 牛富强, 杨燕明, 文洪涛, 等. 瓶鼻海豚的Click声信号特性[J]. 声学技术, 2011, 30(2): 148-152.
[6] 牛富强, 薛睿超, 周在明, 等. 印太瓶鼻海豚(Tursiops aduncus)通讯声信号分类及特征参数的环境差异性分析[J]. 声学学报, 2020, 45(2): 189-195.Niu Fu-qiang, Xue Rui-chao, Zhou Zai-ming, et al. Analysis of Differences on Whistle Classification and Characteristics of Indo-Pacific Bottlenose Dolphins(Tursiops ad- uncus) in Different Environment[J]. Acta Acustica, 2020, 45(2): 189-195.
[7] 陈晟, 牛富强, 林长伦, 等. 不同环境下瓶鼻海豚click信号及仿真分析[J]. 声学技术, 2019, 38(4): 452-458.
[8] 景志宏, 林钧清, 钱建立, 等. 水下目标识别技术的研究[J]. 舰船科学技术, 1999, 21(4): 38-44.
[9] Capus C, Pailhas Y, Brown K, et al. Bio-inspired Wideband Sonar Signals Based on Observations of the Bottlenose Dolphin(Tursiops Truncatus)[J]. The Journal of the Acoustical Society of America, 2007, 121(1): 594-604.
[10] 任超. 基于支持向量机的水下目标识别技术[D]. 西安: 西北工业大学, 2016.
[11] Au W W L, Andersen L N, René Rasmussen A, et al. Ne- ural Network Modeling of a Dolphin’s Sonar Discrimination Capabilities[J]. The Journal of the Acoustical Society of America, 1995, 98(1): 43-50.
[12] Lecun Y, Bengio Y, Hinton G. Deep Learning[J]. Nature, 2015, 521(7553): 436.
[13] Lecun Y, Bottou L. Gradient-based Learning Applied to Document Recognition[J]. Proceedings of the IEEE, 1998, 86(11): 2278-2324.
[14] Simonyan K, Zisserman A. Very Deep Convolutional Net- works for Large-Scale Image Recognition[EB/OL]. ArXiv, (2014-09-04)[2020-07-14]. https://arxiv.org/abs/1409. 1556.
Underwater Target Identification Based on Dolphin Auditory System Model
ZHOU Zhuo, LIANG Hong, YANG Chang-sheng, ZHAO Guo-gui
(School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China)
Extracting feature information from the active sonar echo of target is an effective method to realize underwater target classification and identification. The excellent performance of animal sonar in underwater target identification provides a solution for artificial sonar. In this study, the click signal of bottlenose dolphin is used as the transmitting signal of active sonar. The echo characteristics of the target are extracted by wavelet transform and model of dolphin auditory system, and are classified as the input of support vector machine. In addition, this paper proposes an idea that the time spectrum obtained by the model based on dolphin auditory system is used as the input of convolution neural network to classify and identify the target. The results show that compared with that of the wavelet transform method, the feature extraction method based on the computer model of dolphin auditory system is better for target classification and identification. Combining with convolution neural network, using dolphin click signal and model of dolphin auditory system can obtain better results in underwater target identification.
dolphin click signal; dolphin auditory system; target classification and identification
TJ630; TN911.72; Q811.211
A
2096-3920(2021)02-0147-06
10.11993/j.issn.2096-3920.2021.02.003
周卓, 梁红, 杨长生, 等. 基于海豚听觉系统模型的水下目标识别[J]. 水下无人系统学报, 2021, 29(2): 147-152.
2020-07-14;
2020-07-24.
国家自然基金项目资助(61971354, 61771398).
周 卓(1996-), 男, 在读硕士, 主要研究方向为水下信号处理.
(责任编辑: 杨力军)
猜你喜欢
汽车观察(2021年11期)2021-04-24 20:47:38
计算机工程(2020年3期)2020-03-19 12:24:50
学生天地(2019年30期)2019-08-25 08:53:08
中国听力语言康复科学杂志(2019年3期)2019-06-24 09:51:20
电子制作(2018年19期)2018-11-14 02:37:08
中国交通信息化(2018年3期)2018-06-13 03:27:58
自动化学报(2017年11期)2017-04-04 02:52:58
中国交通信息化(2016年2期)2016-06-06 07:28:02
噪声与振动控制(2015年4期)2015-01-01 07:08:21
轴承(2010年2期)2010-07-28 02:26:12
