
大学普通力学实验中驱动频率对声速测量结果的影响*
2021-05-14 08:28朱旭鹏薛书文李佳楠
物理通报 2021年5期
朱旭鹏 廖 峻 薛书文 李佳楠
(岭南师范学院物理科学与技术学院 广东 湛江 524048)
声波是一种能够传输能量的纵波,不同于横波传播方向与传播介质振荡方向垂直的关系,声波在传播过程中,传播方向与传播介质的振荡方向一致,是一种传播介质的密度疏密波[1].声速是用来表征声波在传播介质中行进快慢的物理量.理想气体在热力学温度273.15 K时的声速为331.45 m/s[2].声速测量是大学普通物理实验力学部分中的重要组成部分,是学生综合理解纵波振荡、驻波形成和振动合成等物理过程的重要实验行为.
根据声波的频率值可以将声波分为次声波(<20 Hz)、可闻声(20~20 kHz)和超声波(>20 kHz).超声波的传播速度是理解传播介质特性或状态变化的重要物理量[2].超声波常见的测量方法有两种,共振干涉法(驻波法)和相位法(李萨如图形法).在大学物理声速实验中,通常所采用的声波频率为20~60 kHz,这一范围内压电陶瓷换能器是超声波产生和接收的最佳元件[3].一般地,在声速测量过程之前需要测定压电陶瓷换能器的最佳工作频率点(最强谐振频率),以便在后续的测量中获得高精度的测量值.每对压电陶瓷换能器都只有一个最强谐振频率,其测定方法是固定换能器之间的距离,通过调节驱动频率,找出极大值点对应的频率即为压电换能器最强谐振频率,也是最佳的工作频率点.但是,我们发现在调节驱动频率的过程中,不仅仅有一个极大值点,假如每一个极大值点对应一个谐振频率,那么如果不用最强谐振频率,而选择用次强或者次次强谐振频率,甚至用非谐振的驱动频率,对声速测量结果的影响如何,实验教师和实验员需要更进一步的把控.
1 仪器 测量原理及频率选择
本次实验探究中所使用的实验仪器为SV-DH系列声速测定仪(杭州大华仪器制造有限公司)[3].其主要构成部分包括综合声速测定仪信号源(频率范围25~45 kHz)、声速测定仪测试架(图1)和示波器3个重要部件.其仪器连接方式如下:
(1)信号源面板上的发射端换能器接口直接与测试架上的发射压电陶瓷换能器相接;
(2)接收换能器与信号源面板上的接收换能器接口相连;
(3)信号源发射换能器接口和接收换能器接口旁边的波形接口分别与示波器的信道1和信道2相接.
这样驱动频率驱动发射端换能器将电信号转换成声波,声波在接收端接收后被接收端换能器转换成电信号,再通过示波器呈现出来.信道1接收的发射端换能器的驱动电信号作为参考信号,在相位法测量中扮演重要角色.
如图1所示,S1作为超声波发生源,在驱动频率的作用下发射出水平传播的平面声波,S2作为超声波接收探测器,将部分声波信号转换成电信号在示波器中显示,同时将另一部分反射回S1,所以可以用不同的方式测量S2输出的信号,从而得到超声波的声速[4].

图1 测试架示意图
(1)S1发射的和S2反射的两列声波在压电陶瓷换能器之间发生相互干涉,当距离d正好是超声波半波长的整数倍时,超声波在换能器之间形成驻波,此时S2接收到的振荡幅度最大,测出示波器信号极大值对应的位置Li,则相邻两个极大值之间的距离d正好为超声波的半个波长,这一方法记作共振干涉法(驻波法),也称为振幅极值法.
(2)将S1和S2对应的波形信号分别输入示波器的1信道和2信道,并使用X-Y模式比较其相位时,不同的相位差在示波器上呈现不同的形状.当改变距离d来改变相位差时,示波器上的图形将经历椭圆-斜线-椭圆-斜线-椭圆的过程,进一步增大距离时,重复图形之前的行为.相邻出现两次同斜率直线对应的距离差正好是超声波的一个波长,这一方法记作相位比较法(相位法),也作李萨如图形法.
测出超声波波长λ,再结合信号频率f,即可通过公式v=fλ获得超声波声速v[5].
为了更具代表性地选择驱动频率点,我们固定压电陶瓷换能器的距离d=80 mm,对S2对应的示波器信号进行驱动频率扫描寻找,扫描范围为29.5 kHz到42 kHz.在扫描过程中,一共发现5个谐振位置,分别位于31.2,33.5,35.5,38.5和40.5 kHz附近,如图2(a)黑色球体所示.图2(a)同时定性地给出了S2信号强度随着频率的变化趋势,如黑色虚线所示,整个频率范围内存在5个极大值点和4个极小值点.需要注意的是,图中的强度并不是归一化的强度趋势图,由于谐振强度量级的不同,我们对不同的谐振位置选择了不同的示波器标度,具体值如表1所示.

表1 d=80.000 mm时不同谐振峰对应的谐振强度
根据超声波在空气中的理论速度计算公式
可以算得在室温25 ℃的条件下,超声波的理论速度vs=346.256 m/s.基于此可算得用驻波法和相位法测试过程中,间距的变化范围在50 mm左右.所以为了能够在整个距离变化过程中获得较为精确的测量值,我们以80 mm作为测试起点,分别测试了d=80,100和120 mm时5个谐振峰对应的共振频率值,如图2(b)所示,具体数据如表2所示.5个谐振位置分别对应于频率点1~5,其中3是谐振最强频率点.如图2(c)给出了不同频率点对应的共振率平均值和标准差,这一结果表明只有谐振极强的频率值对应的标准差最小,而其他谐振频率点,谐振频率都会由于距离的变化而发生较大的偏移,这主要是因为接收换能器接收到的声波强度变弱导致的.需要说明的是,本研究中所有在示波器中读取的数据都是通过示波器标度和位置旋钮将图形优化至最佳读取的.
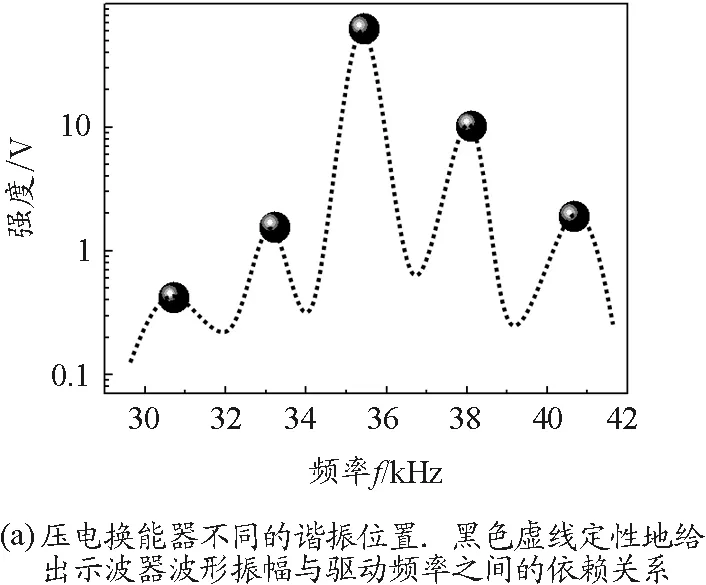
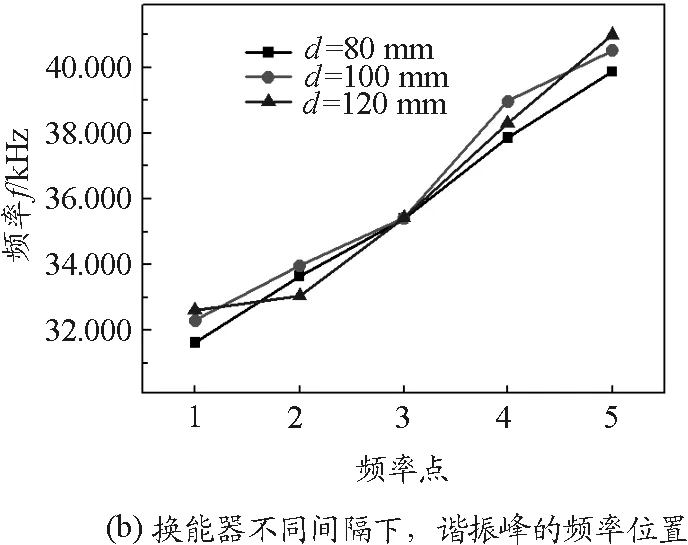

图2 频率选择
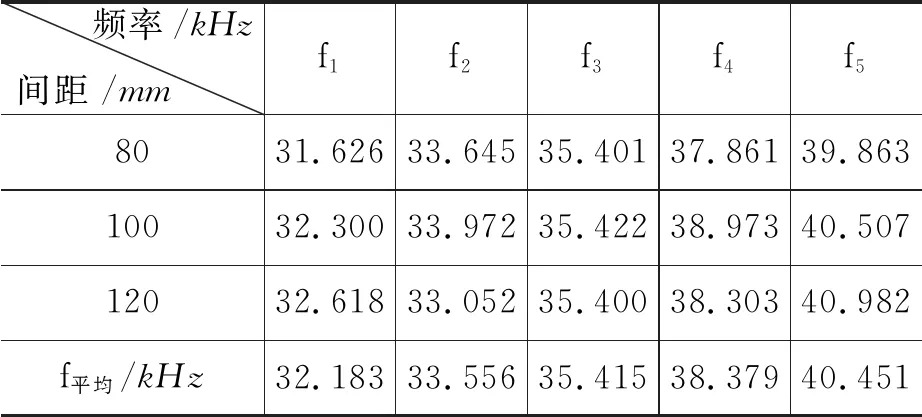
表2 在不同换能器距离下,不同谐振峰
2 结果与讨论
依据本文的研究主旨:驱动频率对超声波声速测量的影响,选择谐振频率平均值为驻波法和相位法测量超声波声速的驱动频率,其中35.415 kHz为换能器的最强谐振频率,32.183,33.556,38.378和40.451 kHz为其他次强级谐振频率.为了系统地研究驱动频率对声速测量的影响,我们将33.556 kHz的次强级谐振频率置换成33.890 kHz的非谐振频率.具体测量数据如表3所示.
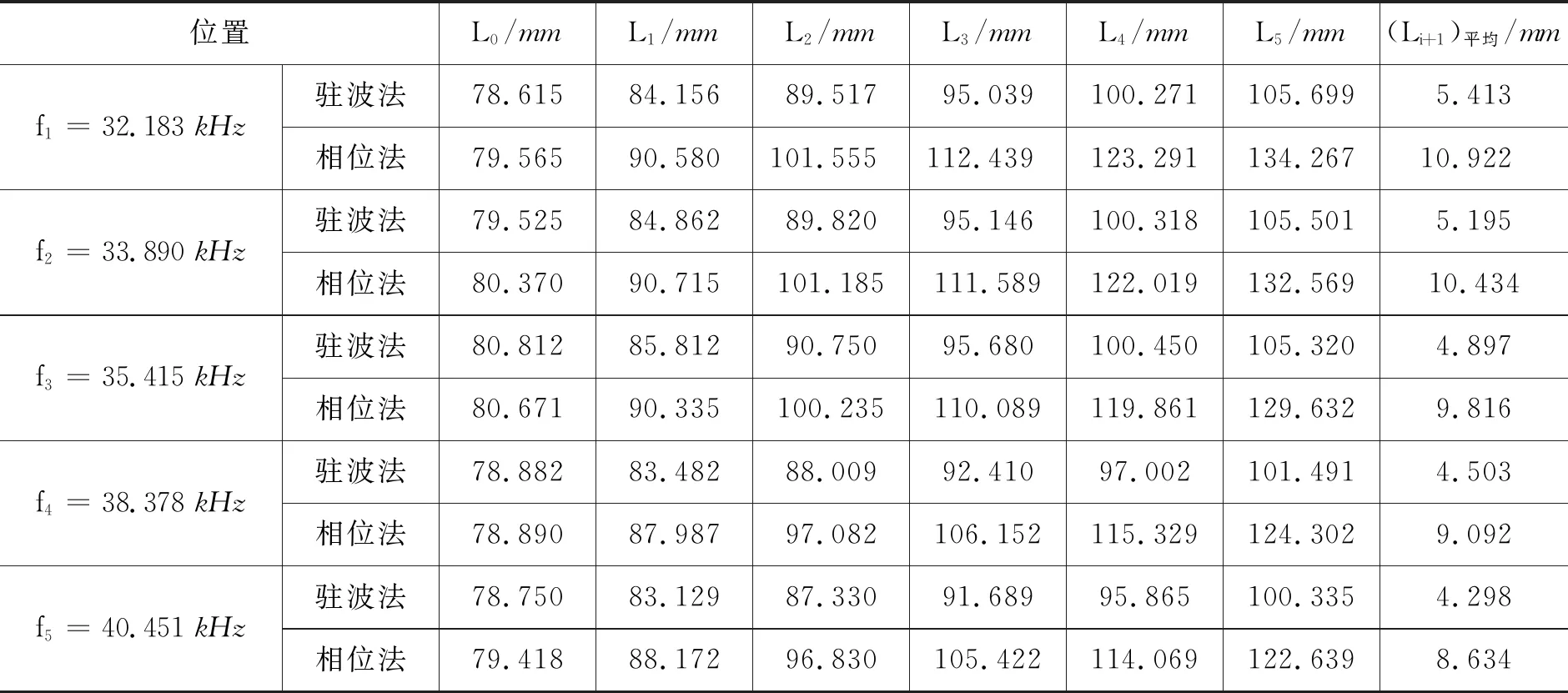
表3 不同频率点下用不同方法测得接收换能器位置信息
图3(a)给出了用驻波法测量、用逐差法处理得到的半波长度及其相应的不确定度.结果表明,随着驱动频率的增大,所测得半波长的长度近似线性降低,而不确定度呈现起伏变化的趋势.最强共振频率处及离其最远的谐振频率处测得的不确定度基本持平,而谐振频率38.378 kHz和非谐振频率下的测量不确定度相对较低.图3(b)给出了用相位法测量、用逐差法处理得到的波长长度及其相应的不确定度.数据显示,随着驱动频率的增大,所测得波长也近似线性减小,不确定度先降低,再增大.在谐振最强频率35.415 kHz和次强级频率38.378 kHz处的测量不确定度相对较低.综合来看,除去38.378 kHz处的测量不确定度,相位法测得的波长不确定比相对驻波法更小,也就是相位法具有更高的精度,非谐振频率处的测量并未展现出更差的精度.
根据波速计算公式v=fλ和误差传递公式,我们分别在图3(c)和图3(d)中计算了驻波法和相位法测得的声速和声速不确定度.

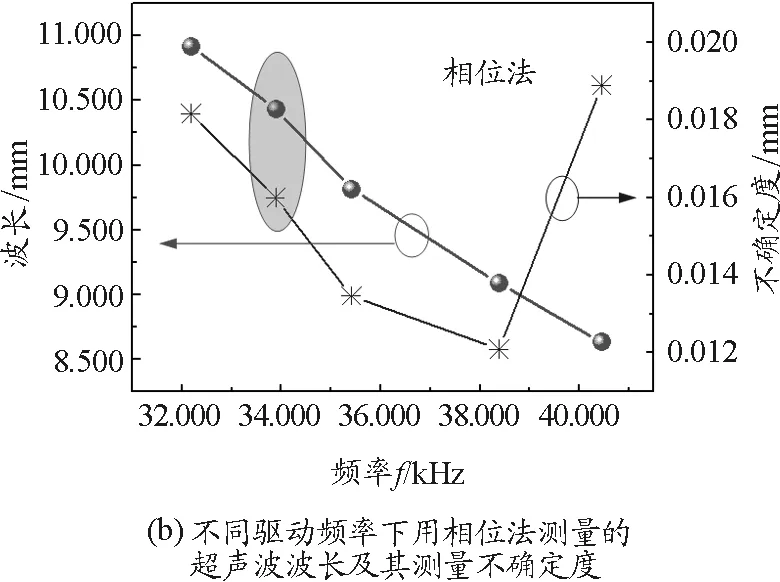


图3 声速测量结果
从图中可以明显看到,相位法具有更小的不确定度,也就是更高的测量精度.此外在非谐振频率下测得的声速相对其他频率来说稍微偏大,如灰色椭圆位置所示.根据超声波在空气中的理论速度346.256 m/s,我们在图3(c)和图3(d)中分别添加了不同驱动频率下测得的声速百分误差.
由图可知在非谐振频率处测得的声速百分误差最大,驻波法和相位法分别可高达1.68%和2.12%.在所有的测试序列中,驻波法和相位法在谐振最强频率点测得的声速百分误差最小.对于驻波法所有谐振频率下测得的声速百分误差都小于0.65%.相位法在所有谐振频率下测得的声速百分误差都小于1.51%,而且当谐振频率大于等于35.415 kHz,声速百分误差都小于0.88%.所以相对而言,驻波法具有更高的准确度.
综上,压电换能器在最大谐振频率下测得的声速准确度最高,在非谐振频率下测得的声速准确度最差,其他次强级谐振频率离最强谐振频率越远,对应的准确度越低.纵览我们选取的驱动频率,最大的声速测量值百分误差来自于非谐振区,误差值也仅有2.12%,所有谐振频率下测得的声速百分误差不超过1.51%.而且根据我们的测量数据,相位法具有更高的精度,而驻波法具有更高的准确度.
3 结论
本文对比了在谐振最强频率、次强级频率及非谐振频率下,使用驻波法和相位法对超声波声速测量结果的影响.在最大谐振频率下,声速的测量结果最为准确;在非谐振频率下,测量结果准确度最差;离最强谐振频率越远,其他次强级谐振频率下测得的结果准确度越低.相位法的精度更高,驻波法的准确度更高.研究结果表明最大的声速测量百分误差来自于非谐振频率,但误差值也仅有2.12%,因此在本实验中,示波器的调节与使用是本实验的主要误差来源之一.对于没有接触过示波器的学生来说,
实验教师应该有条理地仔细讲解示波器的用法. 我们的研究结果在提高实验教师把控学生实验数据、加深测量过程理解和解惑学生问题方面具有一定的指导意义.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
数学年刊A辑(中文版)(2021年1期)2021-06-09
四川师范大学学报(自然科学版)(2020年1期)2020-07-05
城市道桥与防洪(2019年5期)2019-06-26
电子制作(2017年13期)2017-12-15
电子制作(2017年20期)2017-04-26
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
现代电子技术(2016年15期)2016-12-01
西部广播电视(2015年9期)2016-01-18
航空学报(2015年4期)2015-05-07
