基于小型无人机的高位危岩快速调查与稳定性评价
2021-05-14 09:38周成凯李远耀王宁涛
科学技术与工程 2021年10期
周成凯, 李远耀*, 王宁涛, 刘 壮
(1.地质探测与评估教育部重点实验室, 武汉 430074; 2.中国地质大学(武汉)地质调查研究院, 武汉 430074; 3.中国地质调查局武汉地质调查中心, 武汉 430205)
中国是一个危岩崩塌地质灾害频发的国家。许多危岩体孕育于高陡岩质斜坡之上,具有明显的隐蔽性和突发性,其早期的快速识别与稳定性评价一直是地质灾害防治工作中重要的技术难题之一。
目前,中外危岩体调查评价研究主要集中在危岩体的失稳模式、危岩体稳定性分析、崩塌及落石运动特点以及危岩体防护治理等几个方面。传统的针对高位危岩的调查方法主要是通过地质人员进行地面调查,该方法不仅耗时、耗力、效率较低,同时调查过程中存在较大危险性。近年来,随着遥测技术的飞速发展,一些非接触式的新技术与新方法被引入至危岩体的调查与评价研究中,如焦盼飞[1]利用无人机采集影像,通过图像处理手段得到了危岩崩塌中结构面的间距、危岩体规模、岩体表面不规则裂隙的尺寸等信息;孙娟娟等[2]采用无人机航摄方法,建立了浙江省神仙居景区某危岩体的三维模型,探索了准确识别岩体结构面几何特征的方法;胡才源等[3]基于无人机遥感影像,采集贵州省仙宇屯高位危岩体的高精度正射影像和实景三维模型,精确识别了危岩体的发育特征;Vasuki等[4]利用无人机摄影测量技术采集地质结构体上的影像信息,通过采集的影像信息,基于图像处理技术,半自动化提取出岩体表面的结构面的产状;Vanneschi等[5]采取无人机摄影测量和三维激光扫描等手段获取公路旁的危岩体的相关空间参数并进行稳定性分析,最后对该区域崩塌落石进行运动模拟得出了危险性分区图。可见,无人机技术作为一种新技术方法的在危岩调查研究中应用逐渐增多。
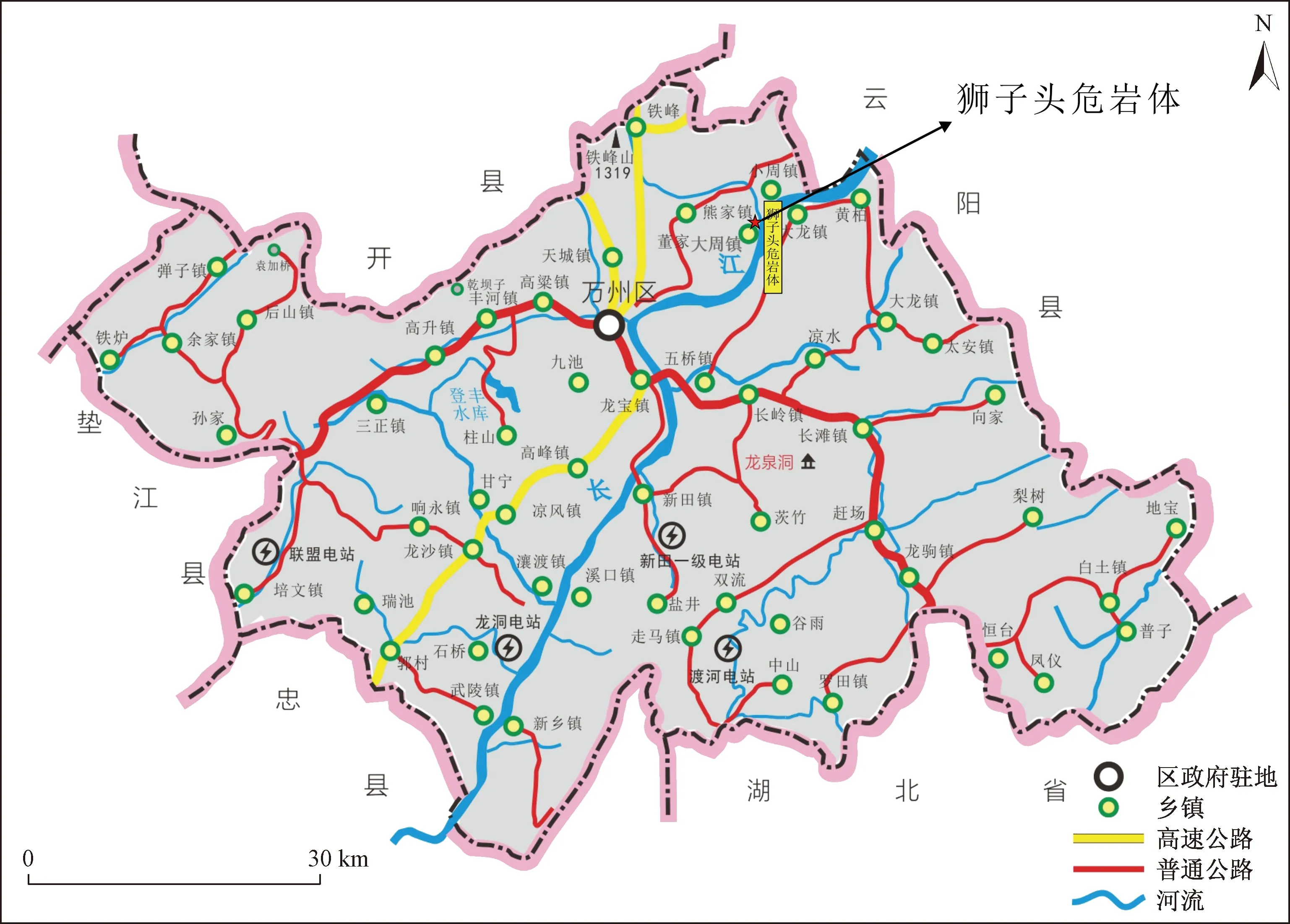
图1 狮子头危岩体交通位置
然而,基于小型无人机平台开展高位危岩体调查评价工作,在无人机的航线规划、结构面快速调查与精准识别等方面仍存在一些不足。现利用旋翼式小型无人机,以重庆万州狮子头危岩体为典型对象,通过开展倾斜影像的采集,获取高清影像并进行后处理,生成实景三维模型、数字正射影像图(digital orthophoto map,DOM)、数字高程模型(digital elevation model, DEM)等数据,对危岩体发育特征进行分析和图像识别,最后采用赤平投影方法对其稳定性进行了快速评价。研究成果可为高位危岩体的非接触式测量、精细地质信息获取及稳定性快速评价提供一种新的思路。
1 研究区概况
近年来,狮子头危岩体陡崖带曾发生不同程度的崩塌或落石灾害,如2009年陡崖第2段发生小型崩塌(图2),砸毁了下方房屋。2017年4月至5月因连续强降雨天气,陡崖带多次发生危岩崩塌,陡崖带有两处危岩发生较大体积的崩塌。危岩带内由于砂泥岩的差异风化作用以及人类活动造成的岩体下部岩腔逐渐发育、扩大,后缘裂隙逐渐延伸贯通,构造裂隙不断发育,形成了多处方量数十至上千方的危岩单体,其中,多数危岩体位于陡崖带2、3段上部,距离陡崖底部高差100~200 m,属于特高位危岩体。狮子头危岩体下方为大周镇铺垭村四组移民居住区,一旦危岩带发生大规模崩塌,其危害将十分严重。

图2 狮子头陡崖带航拍图
由于研究区陡崖带地形极为陡峻,常规的地面调查很难开展近距离的危岩单体及结构面精细调查研究。因此探索采用无人机倾斜摄影技术为主、辅助以人工现场调查的手段,对该危岩地质灾害进行全面系统的调查与评价。
2 基于小型无人机的高位危岩体快速调查
2.1 小型无人机系统组成
小型无人机摄影测量系统主要由两个部分组成:空中飞行部分和地面控制部分[6]。地面控制系统给空中飞行器发出指令,空中飞行器搭载多种传感器设备来获取地面的遥感信息,所获取信息可通过无人机图传系统传输至地面控制设备。其中,无人机飞行控制系统是串连整个观测系统的核心,使无人机可在人工控制和自动控制间不同程度地自主飞行。
本文采用iFlier飞控系统。该飞控系统可自定义区域航线规划,根据不同地质灾害类型和任务需求设计了正射、倾斜、正视等多种遥感数据采集模式。同时,还可自主设定飞行速度以及高度、航线重叠率等飞行参数,目前广泛运用于地质灾害日常调查以及突发性地质灾害的应急调查中[7]。
2.2 遥测航线规划
无人机遥测时的航线规划主要目的是基于调查需求,通过一定的算法控制无人机机身的运动与镜头角度的自动调节,实现单镜头无人机的倾斜摄影达到与多镜头倾斜摄影相同的效果。
狮子头危岩带的分布延伸长约1.3 km,陡崖带平面形态呈横长形,立面形态呈“V”字形。根据地形、主崩方向的差异性,将狮子头危岩从中间山脊处分为两段。危岩西侧至山脊处为危岩A段,山脊至危岩东侧为危岩B段。由于狮子头危岩分布范围较广,无法通过一次航线规划完成全部影像数据采集。因此结合狮子头危岩体的特点,本次无人机调查主要采用正视模式、正视倾斜模式、倾斜摄影模式及全景模式的联合拍摄方法。在危岩体的两端和山脊处用全景模式拍摄采集影像,对于危岩体下方承灾体部分用常规倾斜模式规划航线进行拍摄,对于危岩立面信息采用正视和正视倾斜模式规划航线进行拍摄(图3)。
2.3 数据处理及应用
航线规划完成后,则正式在研究区进行影像采集工作。采用大疆Mavic2行业版飞行器进行影像采集工作,由于其影像具有像幅小、像片旋角大、畸变较重、影像数据量大等特点,还需要进一步结合自动化的后处理软件处理影像数据,生成实景三维模型、DOM(图4)、DEM等数据[8]。本次研究主要采用Smart3D作为内业的后处理软件。
根据无人机调查影像及摄影测量后处理软件生成危岩带的航测成果,首先生成危岩带及其周边范围内的DEM数据,然后将DEM数据导入至arcgis中进行空间分析处理,生成危岩带调查区域内的坡度图、坡向图如图5所示。
进而,基于Smart3D中的Acute3DViewer轻量级可视化模块浏览实景三维模型,并从多个角度观察危岩带岩体地质特征以及各危岩体侧面的纹理信息,同时还可以通过其内置的测量模块测量危岩体的长度、高度和体积等空间信息,为后续稳定性研究提供单体危岩的基础数据[9](图6)。
2.4 危岩带工程地质分区
根据无人机获取的遥感数据,将狮子头危岩带依据地形地貌和主崩方向分成A、B两部分,如图7所示。各段范围及规模经Acute3Dviewer量测后如表1所示。
A1陡崖带发育连续,延伸长约700 m,高程225~245 m,高14~20 m,坡向210°~230°,坡度75°~88°,其西侧下方25~50 m为居民区,平均坡度16°~20°,中部下方为橘树林,平均坡度25°~30°,东侧靠近山脊,坡度约30°。A1陡崖带西侧较破碎,破碎带靠近山脊,长约70 m,占A1陡崖带总长的10%。
A2陡崖带发育连续,延伸长约680 m。A2段高程275~310 m,高8~35 m,坡向205°~225°,坡度78°~85°,下部斜坡两侧陡中间缓,两侧坡度20°~30°,中间坡度10°~20°,中部有1户1人居民居住。A2陡崖带西侧较破碎,破碎带靠近山脊,长约170 m,占A2陡崖带总长的25%。
A3陡崖带间断发育,延伸长约650 m,高程分布不一,325~365 m,高度6~40 m,坡向184°~225°,坡度80°~86°,其西侧下方多为阶梯型耕地,平均坡度约20°,中部及靠近山脊下方为荒林,多灌木,平均坡度25°~30°,东侧靠近山脊,坡度约35°。
B1陡崖带发育连续,延伸长约470 m。高程217~245 m,高9~18 m,坡向115°~120°,坡度75°~85°,距离下方移民居住区50~80 m,下部斜坡两侧陡中间缓,两侧坡度20°~30°,中间坡度10°~20°。
B2陡崖带发育连续,延伸长约600 m。高程270~310 m,高8.5~35 m,坡向115°~140°,坡度78°~88°,下部斜坡主要为树林坡度25°~35°。
B3陡崖带发育连续,延伸长约580 m。高程315~375 m,高22~40 m,坡向120°~140°,坡度80°~88°,下部斜坡主要为树林,坡度20°~30°,距离陡崖带B2距离30~40 m。
3 危岩体结构面的精细识别
3.1 结构面的图像识别
岩体结构面控制着危岩体的稳定性及破坏机制。传统的结构面现场调查,主要以现场测线法与统计窗法作为主要方法,该方法虽简单实用,但是对于高位危岩体的调查受地形影响,具有较大的局限性。现运用无人机技术对高位危岩体中结构面进行调查,并结合MATLAB软件中的图像处理技术对其进行识别提取,具有非接触式与快捷实用等显著优点。
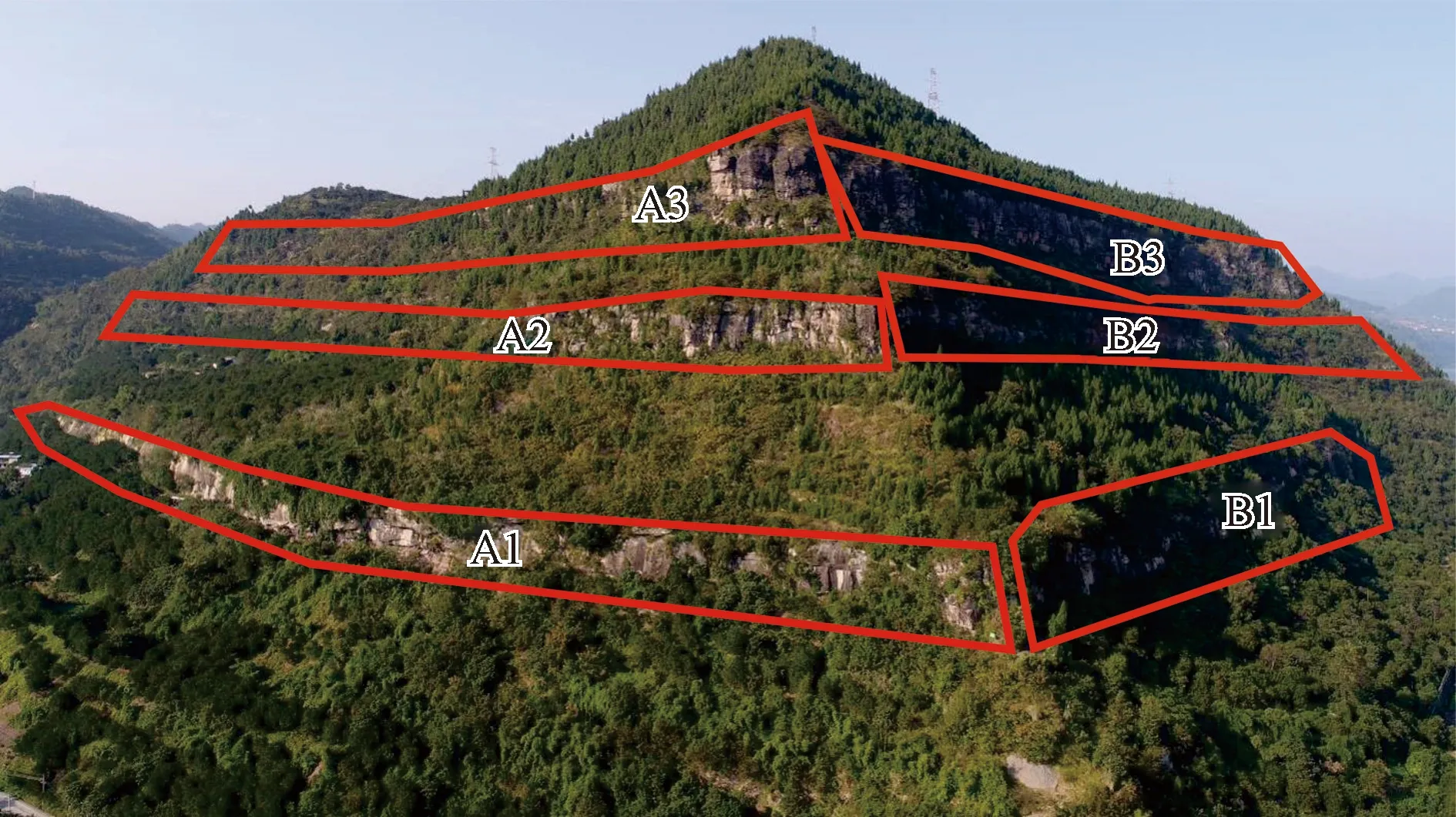
图7 狮子头陡崖带分段图

表1 狮子头陡崖带基本发育特征
基于MATLAB图像处理的结构面识别技术的基本原理,是通过无人机采集的危岩体表面影像,采用图像增强模块中的图像平滑功能和图像分析中的边缘检测功能、图像特征提取中的霍夫(Hough)变换法,将结构面从高位危岩体中识别提取出来。具体流程如图8所示。
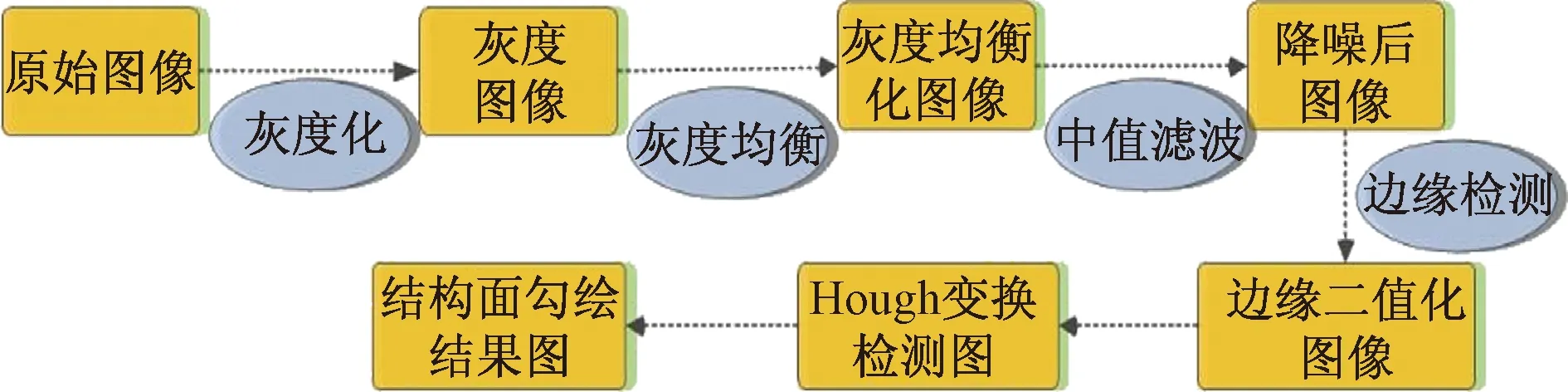
图8 结构面图像处理识别流程图
3.1.1 图像预处理
图像预处理主要包括图像的灰度处理、对比度增强处理、降噪处理等基本流程,通过对无人机采集的图像进行预处理突出图像中所需要的主要信息,去除或弱化不需要的次要信息。
首先运用图像预处理中的降噪模块,去除图像采集过程中产生的噪声;因灰度图相比于RGB真彩色图可以加快在软件中的运算速度,现将RGB彩色图像进行灰度化转换成灰度图;再进一步采用图像增强工具增大结构面与岩块之间的对比度;最后,采用灰度均衡化的方法可得到结构面与危岩结构体背景差异明显的灰度图,如图9所示。
3.1.2 图像增强
图像增强的目的在于突出图像中的目标部分,而抑制图像中多余的部分。本文采用中值滤波这种非线性的处理方法,通过对邻域内像素按灰度值排序,基于排序的结果决定中心像素的灰度,消除离散噪声点。MATLAB中提供了实现中值滤波的函数Medfilt2( ),处理结果如图10所示。
3.1.3 图像分析
1)边缘检测
图像中不同的区域是由颜色相近的像素所组成,区域之间的边缘表现为颜色上的跃变。边缘检测技术就是利用数学上微积分中的求导等方法找出图像中跃变部分从而寻找出边缘。边缘检测的算法基于对邻域内像素灰度进行一阶、二阶求导及梯度运算,其结果通常以灰度图或二值图呈现,原图像中的边缘部分以灰度较高的像素显示,无边缘部分在灰度图中则以黑色或灰色显示[10]。
现选用Canny算子进行图像边缘检测,Canny算子与其他边缘检测算子不同的是采用双阈值的方法检测,通过高阈值得到边缘图像、基于低阈值将高阈值图像中的边缘连接成轮廓,直到整个图像的边缘闭合[11]。
通过调整不同分割阈值,对比其边缘检测结果,得出阈值的取值为(0.7, 0.5)时相应的边缘轮廓较为符合实际的边缘分布情况,如图11所示。

图10 狮子头危岩B3段局部中值滤波效果图
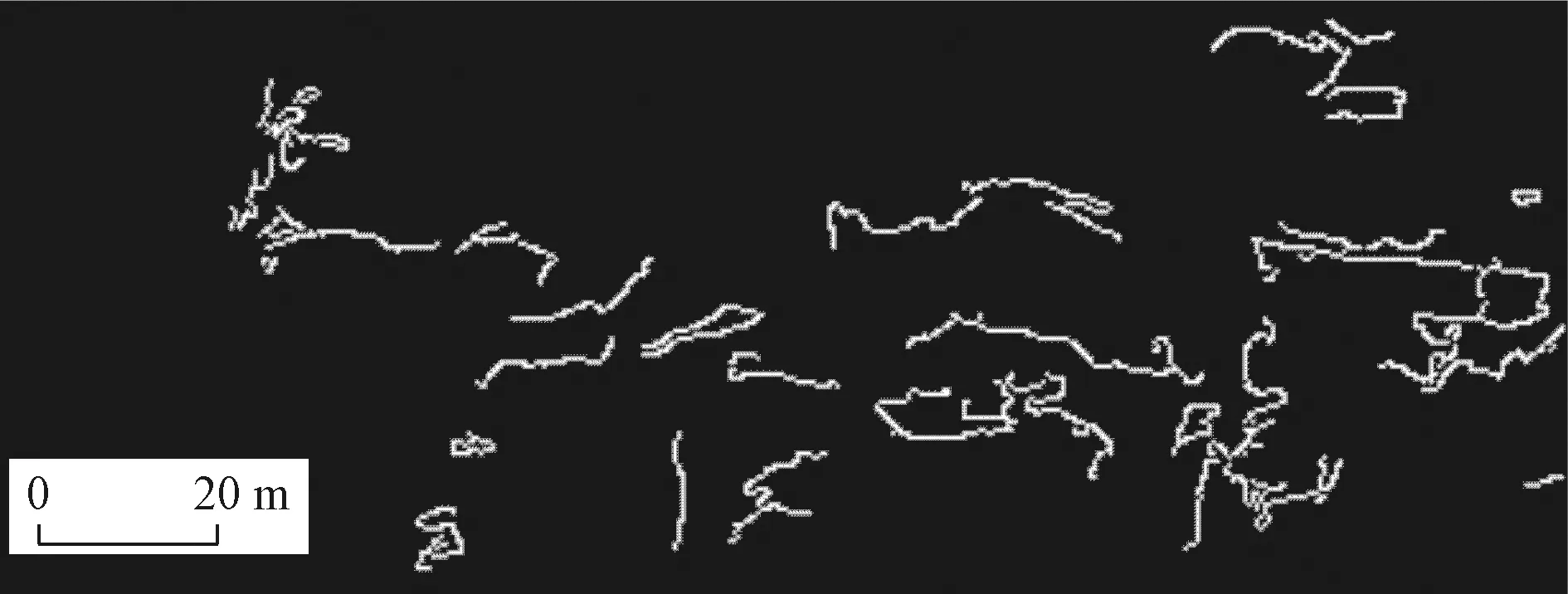
图11 Canny算子(0.7,0.5)边缘检测结果图
2)图像特征提取
霍夫变换是一种利用图像的全局特征将特殊形状的边缘像素连接起来,从而在图像中形成连续平滑的方法,实质上是基于点线之间的对偶性,将图像中的曲线转换为参数坐标系中的点,把形状检测问题转化为寻找参数坐标系中的峰值问题。霍夫变换常用于图像中直线和圆的检测,因此也适用于结构面的识别中[12-13]。
如图12~图14所示经过一系列的图像处理操作,由于无人机的拍摄角度和岩体表面植被覆盖的限制,共自动识别出13条特征较为明显的结构面,结合人工目视补充识别出5条结构面。基于上述图像识别的流程,对狮子头危岩体B3段危岩带中的结构面进行识别提取,识别出的结构面如图14所示。
3.2 结构面产状识别
要识别结构面产状需得出其倾向和倾角要素,无人机拍摄的影像上每一个像素点都有其经纬度信息。通过Acute3DViewe浏览危岩体三维模型可直接读取岩体结构面任意一点的经纬度和高程。根据李水清等[14]在危岩体结构面上选择不共面的三点,根据三点确定一个平面的原理算其法向量,进而求得该结构面的产状(图15)。
其原理为:设结构面法向量为n=(A,B,C),倾向α、倾角β为
(1)
(2)
式中:A=(y2-y1)(z3-z1)-(y3-y1)(z2-z1);B=(x3-x1)(z2-z1)-(x2-x1)(z3-z1);C=(x2-x1)(y3-y1)-(x3-x1)(y2-y1),其中x、y、z分别为平面上所取三点的坐标及高程;A、B、C为结构面法向量n的空间坐标。由A、B、C的组合关系可以查出倾向的方位角β方(表2)。
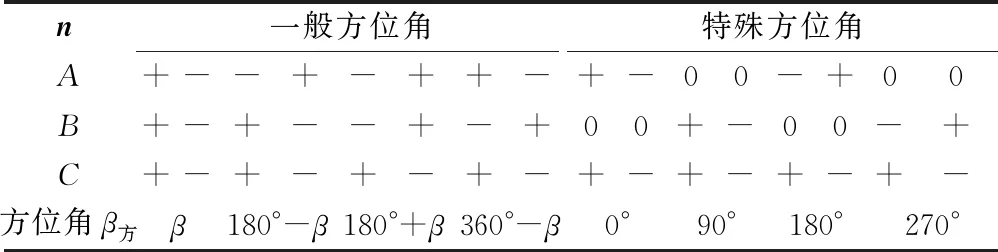
表2 倾向方位简表
根据以上原理,将相关公式输入到Excel表格中编写相关程序以实现产状自动计算,在表格中填入基于Acute3DViewer读取的坐标高程即可自动算出获取的结构面产状。
4 危岩单体稳定性分析
通过无人机影像生成的三维模型,利用三点法测产状的原理量测出B3段部分结构面产状信息,并对其迹长通过Acute3DViewer中的测量工具量取同一位置的三维模型的长度。B3段危岩体部分结构面发育特征识别结果如表3所示。
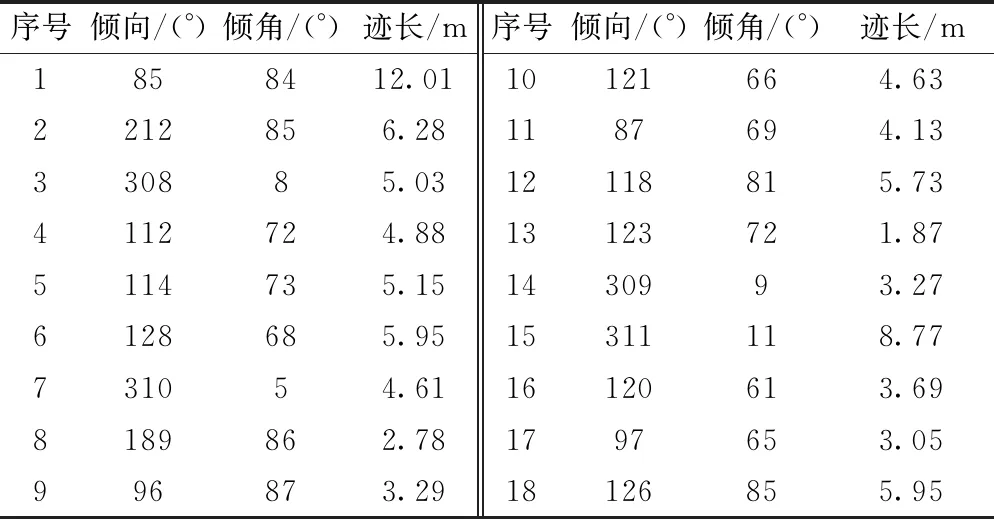
表3 危岩带B3段结构面信息表
基于以上无人机调查及识别结果,结合少量的地面补充调查。以B3段陡崖带为例,对无人机识别的部分高位危岩采用赤平投影的方法进行稳定性分析[15],结果如表4所示。
5 结论
(1)以重庆市万州区狮子头危岩体为例,基于小型无人机,通过合理规划航线、高效地采集数据,获取有用的地质灾害信息及其孕育环境的遥感影像数据。通过后处理软件平台计算生成二、三维数据产品,通过遥感信息提取技术与地质灾害分析相结合,提供研究地质灾害调查点的基础数据,这种具有无接触式、无视地形因素、高效安全等特点的调查手段,对高位危岩的快速调查具有重要意义。
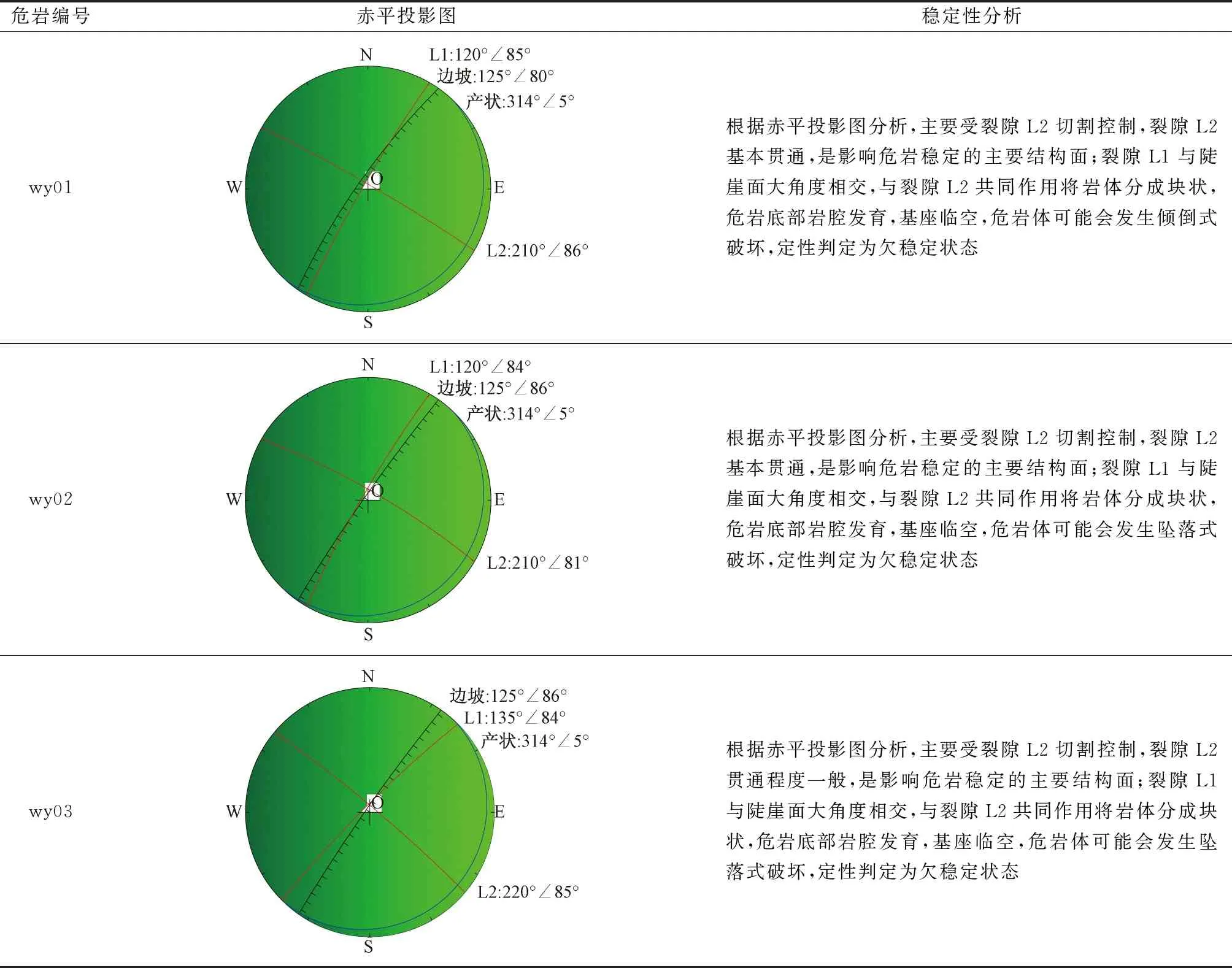
表4 赤平投影图定性分析
(2)利用MATLAB图像识别技术,运用图像识别中的灰度增强、边缘检测、霍夫变换等方法,识别出危岩体中发育的结构面等信息。并运用前期基于无人机调查提供的坐标等基础数据运用空间三点法计算出结构面产状,并实现结构面信息的快速提取。
(3)基于图像识别获取的结构面信息,结合收集的资料,采用赤平投影法对B3段危岩带中的3个典型危岩体进行稳定性评价,发现危岩体中普遍发育有两组结构面,其中主控结构面的产状较为相近,倾角较陡。危岩破坏模式主要为坠落式和倾倒式。
猜你喜欢
建材与装饰(2022年34期)2022-12-07
金桥(2022年5期)2022-08-24
华东交通大学学报(2022年1期)2022-04-06
考试与评价·高二版(2020年4期)2020-09-10
汽车与驾驶维修(维修版)(2020年4期)2020-07-06
福建基础教育研究(2020年3期)2020-05-28
建材发展导向(2019年9期)2019-11-29
小猕猴学习画刊·下半月(2018年2期)2018-05-14
作文大王·低年级(2016年10期)2016-10-13
餐饮世界(2015年3期)2015-06-21