基于红外测温与巡检机器人的开关柜状态评估系统
2021-05-13 05:44梅林
电气自动化 2021年2期
梅林
(国家电网河南电力公司 信息通信公司,河南 郑州 450000)
0 引 言
开关柜由于具备体积小、成本低、操作方便和维护量小等特点,在配电电压等级的电网中得到广泛应用[1-3]。然而,由于设计紧凑和空闲散热有限,常常出现过热故障。这种过热故障通常由主通流回路的接触不良或异常工况引起,如果未得到及时遏制,将造成整个开关柜或配电系统的故障或事故[4-5]。
目前对开关柜的过热故障通常采用温度监测的方法。按技术原理分类,目前开关柜的温度监测方法主要有基于声表面波、红外热像技术、热电原理及光纤的温度监测方法[6-8]。红外测温由于非接触式测温的特点,逐步在开关柜中得到应用。然而,由于开关柜测温存在安装后不可调整和存在设备安全稳定运行风险等问题,因此需要进一步改进。此外,运维人员对开关柜的巡检操作通常包括定期红外测温,该项工作较为繁琐,而目前重要的变电站已经出现了巡检机器人,如何充分利用巡检机器人来减少运维人员工作量,提升工作效率,也是当前开关柜运维中面临的一大问题[9-10]。
为此,研究了基于红外观察窗的开关柜红外测温方案,结合巡检机器人设计了一套基于红外测温与巡检机器人的开关柜状态评估系统,并在变电站开展了现场应用。
1 红外测温原理与红外测温单元
1.1 红外测温原理
红外测温利用了任何物体在绝对零度以上都会发出红外辐射这一特性,通过对物体发出的光波的接收,从而获取物体表面温度信息。红外线是一种波长介于0.76 ~1 000 μm的光波,式(1)给出了物体发射的红外辐射能量随温度的变化规律。
M=εδT4
(1)
式中:M为物体单位面积在单位时间内的辐射出射度;ε为待测物体的发射率;δ为斯蒂芬—波尔兹曼常数;T为温度。由式(1)可知,只要知道物体发射率,并利用红外传感器测量得到物体辐射出射度,就可计算得到物体的表面温度。
1.2 红外测温单元
红外测温单元的主要功能是实现红外信息的采集与处理,工作原理如图1所示。被测物体的红外辐射波通过光学元件收集整合输送给红外探测器,红外探测器再将信号转换成最终可见的红外热像图。运维人员和机器人可根据红外热像图信息判断开关柜内各关键部位的温度信息,做出科学合理的运维检修策略。
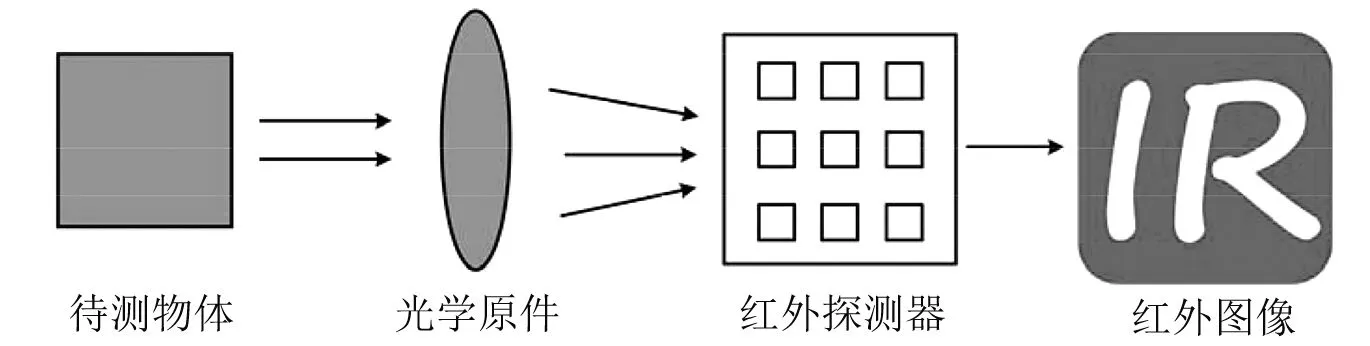
图1 红外测温单元原理
红外探测器是红外测温单元的关键部件,它是将捕获的红外光信号转换成电信号的关键部件,因此直接影响到整个红外测温单元的性能。本文红外探测器的基本性能参数如表1所示。
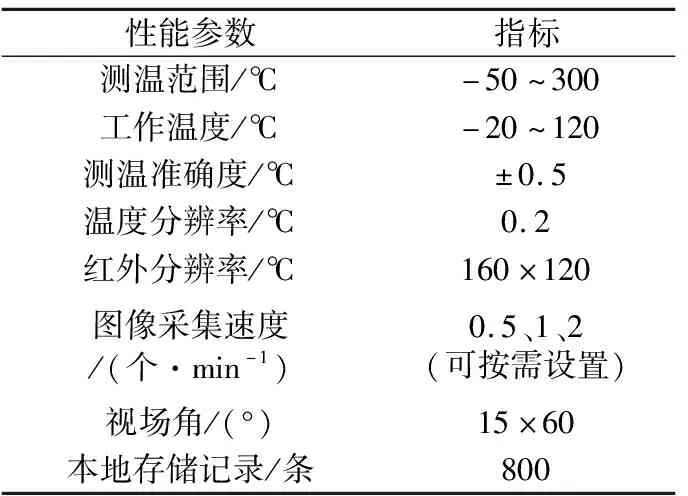
表1 红外探测器性能参数与指标
2 红外测温装置与巡检机器人配置方案
2.1 开关柜常规红外测温方式存在的问题分析
传统的开关柜红外测温系统是将红外传感器安装在开关柜内部的地电位处,这种安装方式存在以下一些问题:①红外传感器需安装于开关柜内,而开关柜的结构较为紧凑,传感器的引入很难保证绝缘距离不受到任何影响,在一些极端情况,传感器的存在可能会引起一些放电隐患;②红外传感器一旦安装完成,运行中由于柜门不能打开,传感器的角度与位置等均不能调整,因此对开关柜关键位置的温度监测存在一定的盲区。为了避免上述不足,在开关柜柜面设置特殊材料制作的红外测温窗口,将红外热像仪或点温仪置于红外测温窗口外进行开关柜关键部位的温度测量。该种方式虽然避免了内置式开关柜测温传感器的不足,但是由运维人员对开关柜温度进行巡视测量,不仅工作量大,还可能在出现开关柜意外情况时危及到运维人员的生命安全。鉴于上述不足,提出了基于红外测温窗口与巡检机器人相结合的开关柜温度测量方式。
2.2 红外测温装置与巡检机器人
首先在待测开关柜上安装红外测温窗口,窗口的安装要遵循以下原则:①窗口的设置不能影响开关柜的密封与遮挡等基本用途,且不能影响开关柜内部的绝缘性能;②窗口的设置要保证在窗口外能有效拍摄到内部待测部位的温度分布,这样方能保证机器人巡检的效率;③窗口采用氟化物晶体,其自身具有耐受高温、高强度压力及高度气密性的特点,能够满足开关柜相关的防护与防爆要求。
红外测温单元安装于巡检机器人上,利用巡检机器人的可移动操作性能,可实现开关柜的灵活巡检。巡检机器人可单独配置,也可利用站内已有的巡检机器人进行稍加改造而集成红外测温巡检的功能。本文中所用的巡检机器人具有下述特点。
1)智能路径规划
通过内置智能化算法,可以自动根据需求设置开关柜红外测温的巡视路径,避免了重复路途带来的额外工作量,从而明显提升运检巡视的效率。
2)设备全覆盖
采用独特的导航方案,可对整个变电站的主要设备开展360°全方位巡检。具体到开关柜,可对站内各类型的开关柜进行红外巡检,并且可以在配置机器人专用升降梯与智能控制门的基础上,对其功能进行扩展,实现不同高度楼层间的通航巡检目的。
3 开关柜状态评估系统
3.1 状态评估系统结构
基于红外测温与巡检机器人的开关柜状态评估系统结构如图2所示,系统由感知层、中间层与应用层组成。感知层主要包括红外测温单元与巡检机器人,它们共同实现基于红外测温与巡检机器人的开关柜状态评估系统的底层感知,负责采集相关温度数据,获取开关柜关键部件的状态信息。中间层主要起到数据中转和主指令传递的作用,主要包含视频、图像处理与控制单元等数据处理部件与机器人服务器等硬件设施。应用层主要包括开关柜状态评估平台与中心站应用系统。该层汇集了中心站的主流应用系统,其中开关柜状态评估平台能够对中间层传来的红外图像信息进行处理与判别,并能对开关柜关键部件的状态进行评估,从而给出运维检修策略。中间层与感知层之间主要通过无线通信方式进行数据通信,而中间层与应用层之间主要通过有线方式进行通信,且它们处于同一局域网中。
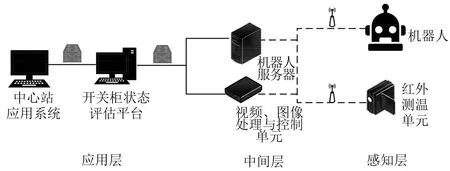
图2 状态评估系统结构图
3.2 状态评估系统工作流程
状态评估系统在接收到前端的红外热像图与温度信息后,首先根据标准或规程做一些初步评估,评估的方法主要有热点温度法与相对温差法。热点温度法主要根据设备或部件的表面温度绝对值进行判断,将超过一定温度阈值的设备或部件评估为异常状态。相对温差法则是将当前的温度值与历史状态进行比较,进而评估设备的状态。
根据上述初步评估方法,设备的过热缺陷一般划分为一般缺陷、严重缺陷与危急缺陷等三种。一般缺陷温差≤15 ℃,且未达到严重缺陷要求;严重缺陷的热点温度≥90 ℃或相对温差≥80%;紧急缺陷的热点温度≥130 ℃或相对温差≥95%。
热点温度法与相对温差法这两种状态评估方法都存在时效性与一致性的难题,且对部分过热故障可能存在评估错误的问题。因此,需要进一步的智能评估。
智能评估主要是结合历史红外热像图信息以及历史温度数据信息。通过智能算法,对当前的开关柜过热状态进行评估,其准确性比单纯采用初步评估方法的更高,如图3所示。常用的智能算法主要有模糊智能评估,基于马氏距离与粒子群算法的智能评估,以及基于反向神经网络的智能评估等多种方法。
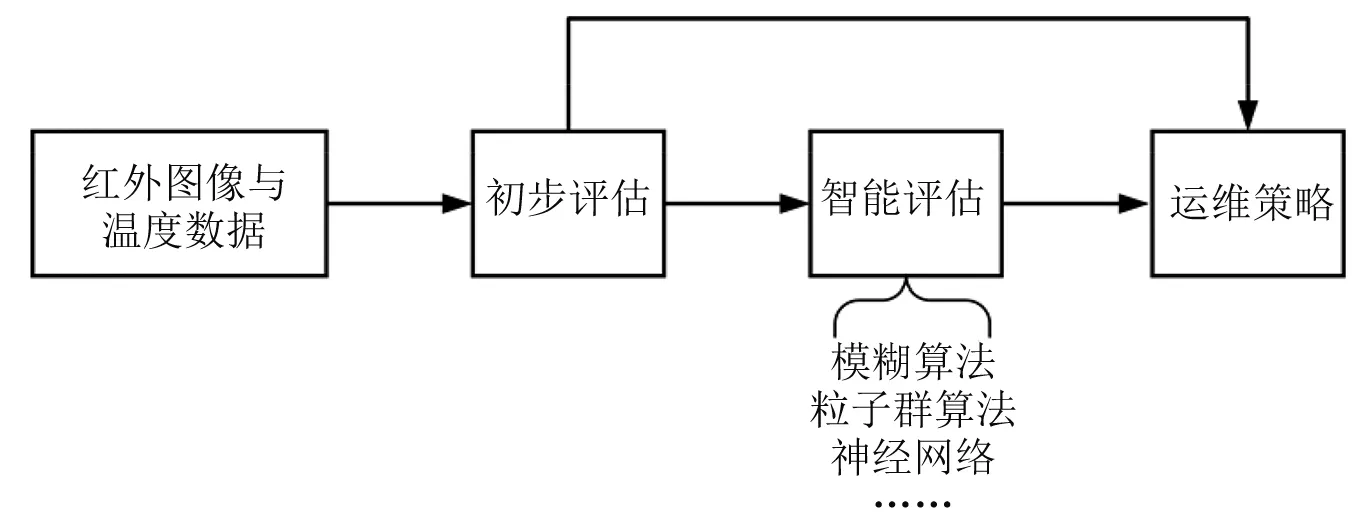
图3 开关柜状态评估流程
4 应用案例
将基于红外测温与巡检机器人的开关柜状态评估系统安装在某500 kV变电站内,采用巡检机器人对该站内的35 kV开关柜进行巡检。系统运行以来,成功减少了站上运维人员的开关柜巡检工作量,明显减少了开关柜红外测温的人工次数与时间。运行半年后,该套系统成功发现了某开关柜内部的母排搭接处存在的过热故障,其温度曲线如图4所示。由图4可知,B相母排搭接处存在明显的温度上升现象,且已超过警戒值,状态评估系统也根据相应评估方法给出了严重过热的评估结果。
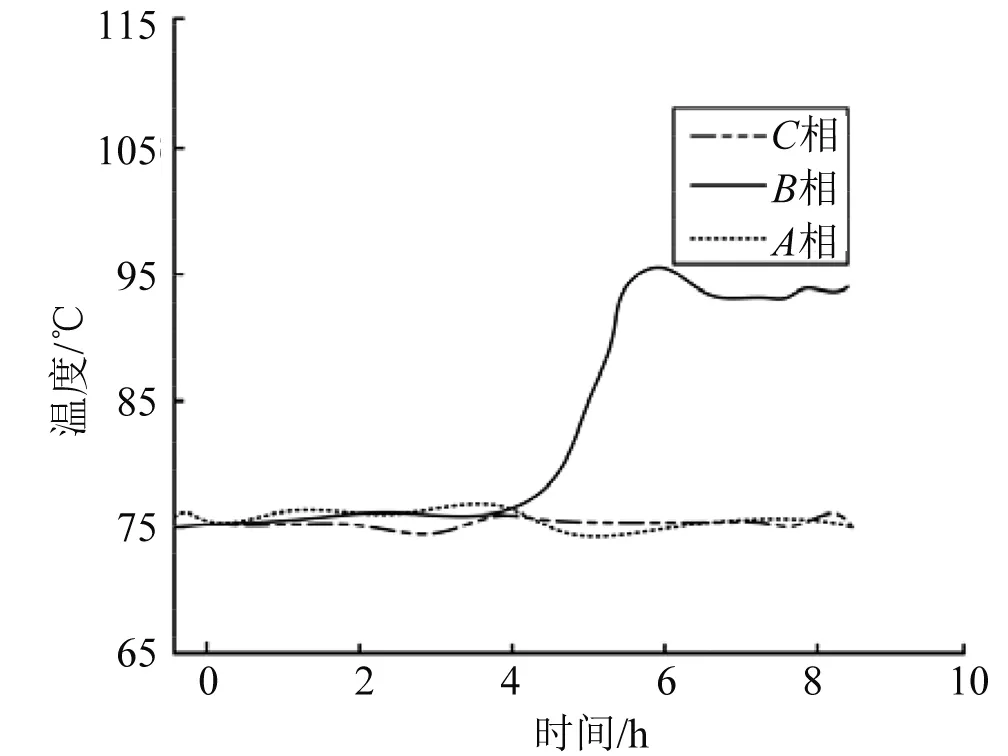
图4 开关柜内母排搭接处温度曲线
运维检修人员根据评估结果,对开关柜内的异常情况进行了停电排查,发现B相母排螺丝存在松动,因而造成接触电阻过大,引起局部温度上升,现场检查情况进一步验证了开关柜状态评估系统结果的准确性。
5 结束语
根据当前红外测温的不足,结合站内巡检机器人配置情况,提出了给开关柜装设红外观察窗的开关柜运检思路,并开发了基于红外测温与巡检机器人的开关柜状态评估系统。现场应用结果表明,该开关柜状态评估系统不仅能够减少运维人员的红外测温工作量,而且能够对开关柜内关键部件的过热情况进行准确评估。研究工作对提升开关柜运维检修效率与智能化水平具有重要意义和明显的工程应用价值。
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
石油化工建设(2019年4期)2019-10-10
电子制作(2019年7期)2019-04-25
电子制作(2018年10期)2018-08-04
电子制作(2017年8期)2017-06-05
山东工业技术(2016年15期)2016-12-01
光学精密工程(2016年3期)2016-11-07
湖州师范学院学报(2016年2期)2016-08-21
电子制作(2016年21期)2016-05-17