
有轨电车信号控制系统技术方案
2021-05-13 07:57姚文华侯锡立贾云光宋凤娟
铁路通信信号工程技术 2021年4期
姚文华,侯锡立,贾云光,宋凤娟
(北京全路通信信号研究设计院集团有限公司,北京 100070)
1 概述
随着社会的快速发展和城市化水平的不断提高,人们对交通出行的需求越来越多,对公共出行的要求也越来越高[1]。高铁、地铁、轻轨和有轨电车在公共交通的不同层级发挥着重要作用[2]。作为中低运量的现代有轨电车具有投资少,建设周期短,节能环保等特点[3],正在被越来越多的城市采用。现代有轨电车,一般在城市道路地面敷设轨道,以全封闭路权或是与社会车辆部分共享路权的方式在轨道上行驶,多采用在信号控制系统下人工驾驶的方式运行[4]。路权形式多,路况复杂,采用人工驾驶由司机保证同一线路上前后列车的安全间隔的行车模式导致司机工作量较大,且有轨电车的安全行驶对人的依赖度较大,风险系数较高[5]。信号控制系统为有轨电车提供控制信息,确保列车安全可靠地运行;与此同时提高运营控制智能化,减少司机劳动强度。传统的有轨电车信号系统采用如图1 所示[6],设备集成度不高,建设、运营、维护成本高。对传统信号控制系统方案进行全面分析后,本文提出了一种优化的解决方案。
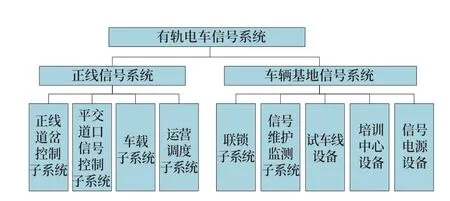
图1 典型传统有轨电车信号系统Fig.1 Typical conventional tram signaling system
2 系统组成
本方案构建的有轨电车信号控制系统由地面、车载两部分组成,如图2 所示。其中,地面部分包含轨旁道岔控制子系统(PCS)、行车综合自动化系统(TIAS)、列车管理子系统(TMC)、轨旁接口箱(TIB)以及路口综合控制子系统(LCC)。车载部分包含车载子系统,其由车载控制主机、测速测距以及列车接口等组成。
TIAS 通过融合自动列车监控系统(ATS)、综合电力监控系统(PSCADA)、环境与设备监控系统(BAS)、列车广播(PA)、乘客信息系统(PIS)等,构建以行车指挥为核心的综合智能监控系统,实现了地面设备的高度集成化,降低了设备的维护成本,实现了对行车、电力及环境设备、乘客信息、广播等进行监控,实现设备、资源、人员统一管理。
TMC 实现列车注册注销管理功能,列车位置跟踪,并将前车位置发送给后车的功能。
PCS 采集轨旁设备信息,接收TIAS、车载子系统(OBCU)以及TIB 的命令,实现进路控制的功能,支持多列车与单列车进路,支持车队模式。
OBCU 基于全线电子地图,实现列车定位功能,MA 的计算,行车速度引导,限速提醒和报警,车辆状态监视,停站时间,早晚点时间显示、远程办理进路等。
LCC 与公路系统接口,实现对路口的防护。
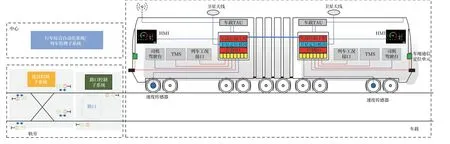
图2 有轨电车信号控制系统框图Fig.2 Tram signaling control system diagram
3 关键技术
有轨电车信号控制系统中涉及的关键技术:多传感器信息融合定位算法、多元进路控制(包括列车自主进路办理)、路口协同控制。
3.1 多传感器信息融合定位
列车安全定位是列车控制系统最重要的基础。多传感器信息融合定位利用多种定位系统的组合定位,可以极大地提高定位的可用性和精度。本文采用自GNSS 全球多模多频卫星定位系统的位置信息、速度传感器、计轴信息以及道岔的位置信息进行多传感器融合完成定位。如图3 所示,车载子系统通过GNSS 全球多模多频卫星接收模块接收来自多种卫星导航系统的数据,获得当前列车的位置及速度。车载子系统通过速度传感器,获取速度传感器的脉冲数,脉宽信息,从而计算当前列车的速度、位置偏移信息。列车定位的过程可以用图3 中的状态机来描述。
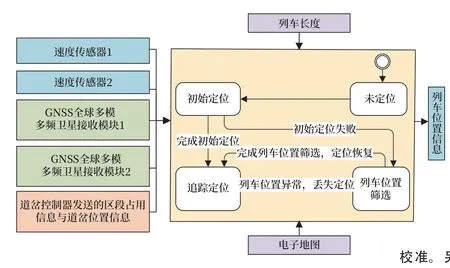
图3 多传感器融合定位算法的示意图Fig.3 Schematic diagram of multi-sensor fusion positioning algorithm
3.1.1 初始定位
在列车上电启动后,列车的定位状态为未定位,并开始初始定位。当GNSS 全球多模多频卫星接收模块收到卫星信息的经纬度信息之后,多传感器信息融合定位算法将该点投影到电子地图的区段上,但由于列车两个轨道间距较近且卫星定位存在一定范围的误差,仅根据卫星定位无法判断出列车精确位置,可能会投射到两个区段上,因此需要上下行信息方能唯一确定一个区段。综上,多传感器信息融合定位算法根据先前列车存储保存的上下行信息,并结合列车的卫星位置信息完成初始定位。
3.1.2 追踪定位
列车完成初始定位后需要根据列车的运行情况周期更新列车位置。列车只能运行在轨道上,在道岔位置确定(定位/反位)的情况下,前方是一条唯一的路径。因此,当列车经过无岔区段时,列车位置在该直线上移动;当列车经过道岔区段时,根据道岔控制器发送来的道岔位置信息亦可唯一确定一条直线,列车位置在该直线上移动;当列车经过折返区段时,切换上下行方向,实现追踪定位。
在现场对如信号机,道岔,站台,路口等关键节点所在位置进行测绘,将获取的经纬度信息作为静态数据,并在电子地图上进行标注。这样,各关键节点在电子地图中的位置和相应的地理坐标对应起来,从而对列车位置进行矫正。相比传统使用应答器进行位置矫正的方式,该方案可以大大减少地面设备的布置,从而减少建设与维护成本。列车通过卫星模块获得的经纬度信息对列车在电子地图上的位置进行校准,并通过累计列车的位移完成列车位置的周期性更新,当速传误差累积超过一定阈值后,用卫星定位信息校准。另外,本方案增加在站台校准的方式,即列车在站台停稳后进行校准。
3.1.3 位置筛选
在列车上电启动初始定位失败后或者列车丢失定位后,进入列车位置筛选过程。列车需要走行一个道岔区段,由GPS 信息结合道岔位置、计轴占用信息、PCS 进路信息,来判断筛选出列车真实的位置。即:车根据卫星定位筛选出的位置,可能在上行方向或者下行方向。列车向前走,多传感器信息融合定位算法从道岔控制器获取道岔位置信息(定位、反位)、计轴信息(占用、空闲)及进路信息。当列车离开一个道岔区段之后,根据这些信息推算列车的位置信息。
综上所述,本方案采用多种方法获取速度与位移信息进行融合并完成定位。
3.2 多元进路控制
有轨电车信号系统的进路办理支持多种控制模式,分别为列车自动控制、中心人工控制、列车人工控制、现地人工控制。实现自动与人工相结合,中心、轨旁、车载三级控制。
采用列车自动控制模式时,由TIAS 给车下发计划。车载ATP 根据列车位置和路口信号状态,自动控制进路办理。
采用中心人工控制模式时,人工在调度终端操作选排进路,单操道岔。调度员在TIAS 的DMI 上选择人工办理进路或者单操道岔。
采用车载人工控制模式时,在列车接近进路时,通过车载DMI,人工选择进路办理或者单操道岔。
采用现地人工操作模式时,在故障情况下,人工通过现地操作盘,实现进路办理或者单操道岔。
3.2.1 列车自主进路办理
当列车进入正线区域时,TIAS 向列车下达单次运行计划,包括运行时刻表、列车车次号、运行路径等信息。当计划信息发生变化时,TIAS 向列车下达运行调整命令,如图4 所示。
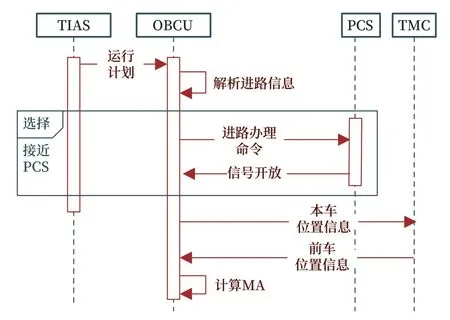
图4 列车自动进路触发序列图Fig.4 Automatic train route trigger sequence diagram
列车收到TIAS 发送的运行计划后,并根据计划路径行车。列车根据运行路径实时计算前方需要经过的进路,在运行至进路前方特定距离时申请办理进路。道岔控制器收到进路办理命令后,经过进路冲突检查之后办理进路并开放信号。
3.2.2 进路冲突控制策略
道岔控制器对进路冲突的控制策略,若道岔控制器同时收到多个有冲突的进路,不做处理;若道岔控制器在不同时间相同始端信号的,按照先到先处理原则,且在处理过程中,其他命令无效。若道岔控制器同一时间收到相同始端信号的进路办理和取消,不办理。
3.3 路口协同控制
有轨电车多为半独立路权,不与道路交通混行[7],但可能与道路平交。在交叉口区域,有轨电车与不同进口不同转向的社会车辆有冲突点[8]。原则上,在保证不影响交叉口整体通行能力的前提下,有轨电车可以优先通过交叉口。有轨电车的路口协同控制方法一般采用有轨电车主动优先策略(包括绿灯延长和红灯早断等方法)和有轨电车被动优先策略。绿波是一种被动优先的效果,如果车辆能够在绿波带内行驶,就能保证其不停车通过所有交叉口,特别是对有专用道的公共交通车辆,由于不受其他车辆的干扰,更容易实现绿波通行,大大提高运行效率。
本方案采用融合主动优先与绿波的方法,对于有轨电车沿线的所有交叉口,根据交叉口特征分别采用适宜的有轨电车通过策略。交叉口一般分为两种类型:行人路口,其特点是只有行人横穿有轨电车钢轨区域,没有机动车穿过钢轨区域;机动车十字路口,其特点是同时有行人和机动车横穿有轨电车钢轨区域。本方案对行人路口采用主动优先原则,而对机动车十字路口采用绿波的原则。
通过VISIM 对某城市有轨电车一号线进行建模仿真验证,该线路共计11 个交叉口,其中4 个机动车十字路口,7 个行人路口。融合主动优先与绿波的方法使得有轨电车平均旅行速度由21.7 km/h 提升至25.3 km/h,平均旅行时间缩短,因此进一步提升了运量。在满足同样的运量的条件下,融合主动优先与绿波的方法可以使有轨电车底数减少,因此可以大幅降低运营商的固定成本。此外,融合主动优先与绿波的方法使有轨电车停车次数减少,从而减少了闸瓦磨损的次数,进而延长闸瓦使用寿命,因此可以大幅降低运营商的运营成本。采用绿波带策略对交叉口道路侧通行能力没有影响,而采用有轨电车绝对优先策略的交叉口对道路侧通行能力的影响与有轨电车发车间隔有关。按照有轨电车发车间隔3 min 计算,道路侧通行能力变为原来的95%,对道路侧通行能力影响不大。
由此可见,融合主动优先与绿波的方法可以综合二者的优势,一方面可以提高有轨电车的服务水平,体现公交优先的交通发展理念,另一方面,在公交优先的前提下,也兼顾道路交通的通行效率。
4 总结
本文通过对基于多传感器融合定位、列车自主进路办理、路口协同控制等核心技术的研究,成功构建了一种新的有轨电车信号控制系统。该方案有效地提高了系统的安全性与可用性,降低了建设、运营、维护成本,提升了运量。该方案现在已经在某城市有轨电车一号线实施并取得了良好的效果。未来,随着人们对出行要求的更加定制化和细致化,信号系统也将更加智能化和多样化,技术手段和实现方案也会继续随之逐步更新和完善。
猜你喜欢
都市快轨交通(2022年2期)2022-06-28
汽车实用技术(2022年10期)2022-06-09
科技视界(2022年10期)2022-05-20
铁道运营技术(2021年2期)2021-04-01
汽车维修技师(2019年7期)2020-01-16
东坡赤壁诗词(2019年5期)2019-11-14
东坡赤壁诗词(2019年3期)2019-07-05
汽车维修与保养(2019年3期)2019-06-19
现代兵器(2017年4期)2017-06-02
中学生百科·小文艺(2009年8期)2009-11-24
