B0B0-B0B0轴式重载高速转向架群动力车的动力学性能预测
2021-05-12 02:40尹智慧王家鑫王淇周强胡晨
机械 2021年3期
尹智慧,王家鑫,王淇,周强,胡晨
B0B0-B0B0轴式重载高速转向架群动力车的动力学性能预测
尹智慧1,王家鑫1,王淇1,周强*,2,胡晨2
(1.中车唐山机车车辆有限公司,河北 唐山 063000;2.西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
介绍了一种重载高速转向架群动力车的主要结构特点,基于动力车的主要技术参数,通过SIMPACK建立了动力车的多体动力学计算模型,对空车(AW0)和满载(AW3)两种工况下的整车动力学性能进行了计算分析,主要包括车辆的稳定性、平稳性和曲线通过安全性,并按照铁道车辆相关评定标准对其总体性能作出了评价。研究表明:B0B0-B0B0轴式重载高速转向架群动力车具有优良的直线动力学性能和曲线通过性能,能够实现在既有客运线路上的高速运行。
B0B0-B0B0轴式;转向架群;动力车;动力学性能
提升重载机车货运能力的主要方式有两种:增大轴重和增加轴数。但随着轴重的增大,车辆轮轨间相互作用力会显著增强,对线路的破坏作用加剧。单节八轴机车在控制轴重的基础上,通过增加轴数的方式提升了车辆运输大型重型物资的能力,具有牵引功率大、粘着重量大、轮轨作用力小、曲线通过性能好、轮轨磨耗小等优点,是一种更具优势的方案。八轴机车在国内还没有应用例子,主要车型和应用都在国外。早在20世纪60、70年代,美国GM公司、GE公司和机车公司、法国Alstom公司和前苏联设计生产了多种八轴内燃机车和电力机车用于牵引重载货物列车和高速客运列车。国内仅有中车资阳机车有限公司2010年为乌兹别克斯坦设计生产了两台用于矿山的八轴内燃机车。
目前国内外单节八轴机车的运营速度普遍较低,还没有将B0B0-B0B0轴式的转向架群结构用于重载高速动车组的前例。针对单节八轴机车横向稳定性较差的问题,中车唐山机车车辆有限公司开发出了每辆车采用多台转向架组合承载车体的转向架群方案,实现重载转向架群动力车能够在现有线路条件上的高速运行。动车组动力车采用B0B0-B0B0轴式,最高运行速度为250 km/h,最高试验速度为275 km/h。
1 B0B0-B0B0轴式转向架群结构
转向架是决定动力车性能的关键部件之一,它的结构形式和各种参数将直接决定动力车运行的安全性、稳定性和舒适性。转向架直接承受车体传来的各种动、静载荷以及轮轨间产生的各种力,并传递牵引力和制动力。因此,转向架应具有足够的安全可靠性及运动稳定性,同时还应具有优良的运行平稳性和较小的轮轨动作用力,并尽量满足标准化、简统化的要求。
动车组动力车设置两组重载高速转向架群,每组重载高速转向架群包含两个B0转向架、一个过渡构架和一套中央牵引装置。动力车增加了过渡构架结构,需要增设三系悬挂装置:车体通过三系橡胶堆坐落在过渡构架上,同时还设置了摇头止挡和抗蛇行减振器。过渡构架坐落在两个B0转向架的四个空气弹簧上,与转向架间设置横向减振器、横向止挡、抗侧滚扭杆和抗蛇行减振器。B0转向架与车体之间设置中央牵引装置来传递纵向牵引力和制动力,中央牵引装置与过渡构架之间设置横向止挡和横向减振器。具体结构主要如下。
(1)过渡构架结构由两个箱型侧梁和箱型横梁组成,与车体之间设置有橡胶堆、摇头止挡和抗蛇行减振器;与一级转向架间设置横向减振器、横向止挡、抗侧滚扭杆和抗蛇行减振器;与中央牵引装置间设置横向止挡和横向减振器等。过渡构架将两个一级转向架连接在一起,只传递车体垂向和横向作用力,不传递纵向牵引力和制动力。
(2)B0转向架为动力转向架,主要由构架、轮对轴箱、一系悬挂装置、中央悬挂装置、驱动装置和制动装置构成。构架为钢板焊接的箱体结构,由两根横梁和两根侧梁构成。构架侧梁中部呈下凹型,为安装二系空气弹簧提供了适当的位置,并降低了整车高度。一系悬挂装置包括轴箱弹簧、一系垂向减振器等,同时提供减振和轴箱定位功能;中央悬挂装置采用空气弹簧,并安装了横向减振器、抗侧滚扭杆、抗蛇行减振器等,中央悬挂装置还设有由间隙和橡胶块提供的非线性横向止挡;基础制动采用全轮盘制动。
(3)轮对的一系悬挂采用转臂式轴箱定位,包含大小两个螺旋钢圆簧、一个橡胶关节和一个垂向液压减振器。螺旋钢弹簧分布在车轴中心两侧,垂向液压减振器安装在大钢簧一侧。同时大小钢圆簧的两端还设置了橡胶衬垫。
(4)齿轮箱一端为滚动抱轴结构,另一端通过上下两个橡胶堆连接在构架横梁的C型支架上。牵引电机则是用螺栓刚性固定在构架横梁的一侧。动力车的牵引装置为推挽式牵引杆,采用低位拉杆斜牵引方式,一端通过关节轴承连接在B0转向架的构架上,另一端通过橡胶关节与固定在车体上的牵引底座相连,倾斜角度与水平方向夹角为6°,名义牵引点据轨面高度为347 mm。
2 重载高速转向架群动力车的物理模型
重载高速转向架群动车组动力车为B0B0- B0B0轴式,电机悬挂方式为刚性架悬,一系轴箱为转臂结构,分别通过橡胶关节、大钢弹簧、小钢弹簧和一系垂向减振器与构架连接,二系悬挂采用空气弹簧与过渡构架连接,三系通过橡胶堆和车体连接。二系配有横向减振器、抗蛇行减振器和抗侧滚扭杆,设置有横向止挡。三系配有横向减振器、抗蛇行减振器,设置有横向止挡和摇头止挡。
动力车由车体、过渡构架、构架、轮对、一系悬挂装置、二系悬挂装置、牵引电动机、传动齿轮箱、传动齿轮箱吊挂装置、转臂轴箱、抗侧滚扭杆和牵引机构组成。每构架的二系悬挂装置由两个空气弹簧、两个横向减振器、一个抗侧滚扭杆和两个抗蛇行减振器组成。一系悬挂装置由轴箱弹簧、一系垂向减振器和轴箱定位装置组成。牵引电机刚性固定在构架上,传动齿轮箱一端通过橡胶堆与构架的C型支架连接,另一端通过轴承抱在车轴上。牵引机构采用推挽式牵引杆。物理模型如图1所示。
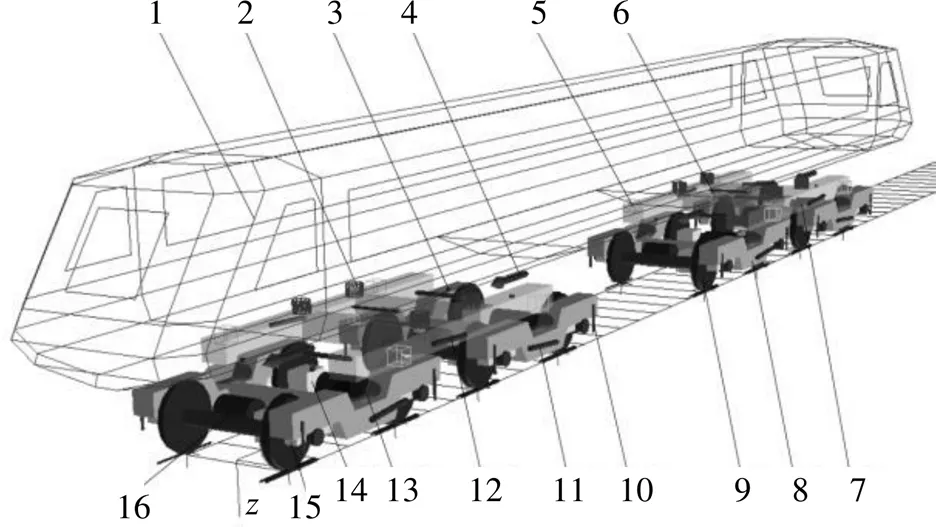
1.车体 2.三系橡胶堆 3.二系横向止挡 4.抗侧滚扭杆 5.摇头止挡 6.三系横向止挡 7.过渡构架 8.构架 9.轮对 10.一系垂向减振器 11.二系抗蛇行减振器 12.三系抗蛇行减振器 13.二系空气弹簧 14.齿轮箱 15.轴箱 16.牵引电机
3 重载高速转向架群动力车的动力学性能
计算车辆的动力学性能需要设置一定的边界条件,采用LMB10踏面与CH60N钢轨匹配的轮轨接触关系来模拟动力车轮轨的运行工况,并考虑蠕滑力的非线性特性。考虑到车辆惯性对计算结果的影响,计算B0B0-B0B0轴式转向架群动力车的动力学性能分为空车(AW0)和满载(AW3)两种工况,对应的轴重分别为9.2 t和16.35 t。根据动力车的结构参数,通过SIMPACK建立动力学模型,并按GB/T 5599-1985《铁道车辆动力学性能评定和试验鉴定规范》和EN 14363标准对计算结果进行评定。
3.1 动力车的线性临界速度
采用根轨迹法来确定动力车系统的线性临界速度。根轨迹曲线揭示了车辆系统雅克比矩阵的特征根随着车速的变化关系,曲线中与动力车运行速度无关的振动模态一般为系统中刚体的振动模态,随运行速度变化明显的振动模态决定车辆系统是否稳定。这些模态通常对应构架和轮对的一次蛇行和二次蛇行,当蛇行运动模态的自然阻尼大于零时,系统不稳定。
图2给出了动力车运行速度在80~560 km/h范围内的根轨迹曲线。计算中速度增量为20 km/h,故图中每一条根轨迹曲线都是由25个“+”号组成,且随着速度的增加,“+”号的形状也变大。图中每一条根轨迹都是动力车一个振动模态随速度变化的轨迹,其中动力车有多个模态的阻尼随速度的提高反而减小,影响动力车线性临界速度模态的自然阻尼已经大于零,以自然阻尼不大于零作为判断条件,动力车空车工况线性临界速度为380 km/h,满载工况线性临界速度为400 km/h。
3.2 动力车的非线性临界速度
动力车非线性临界速度的计算采用初始激励法。选取一段具有美国AAR4级不平顺时域谱的线路作为初始激扰,包括左、右轨的横向不平顺和垂向不平顺。让动力车以一定速度通过该段不平顺后,在无激扰的轨道上继续运行一段时间,通过各刚体横向位移的收敛和发散情况来判断动力车是否失稳,开始发生失稳的速度即对应动力车的非线性临界速度。动力车以运行速度80~480 km/h通过不平顺后,各刚体横向振动位移的极限环幅值变化如图3、图4所示。从计算结果得出,动力车空车工况和满载工况的非线性临界速度均为360 km/h,满足最高运行速度250 km/h的设计要求。
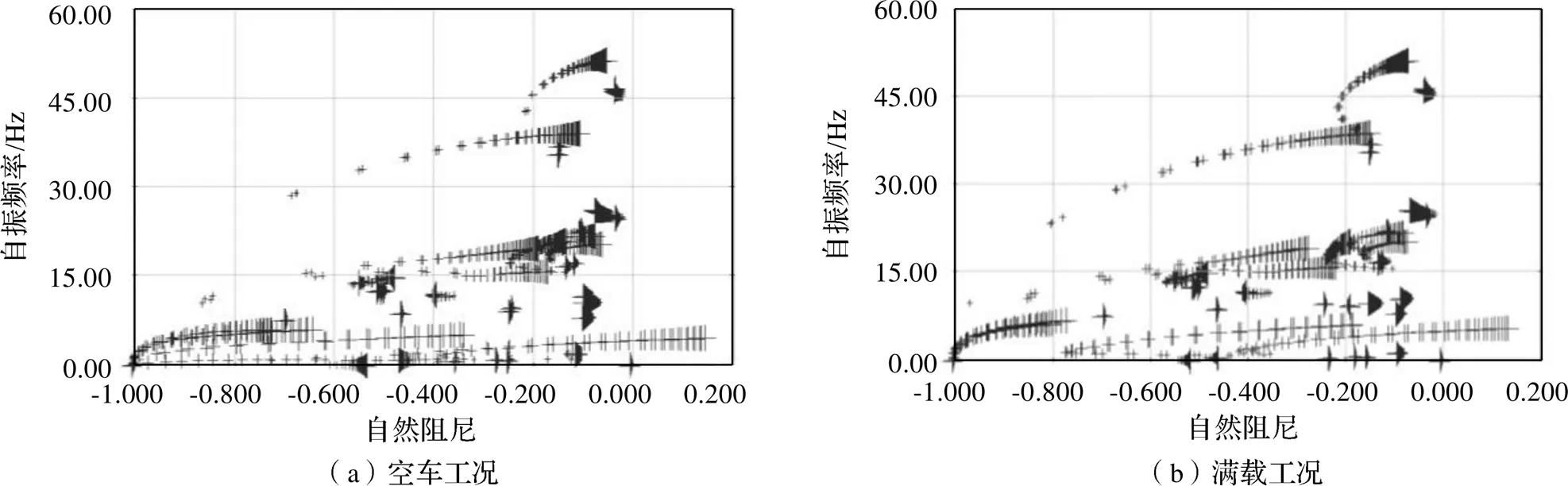
图2 动力车的根轨迹曲线
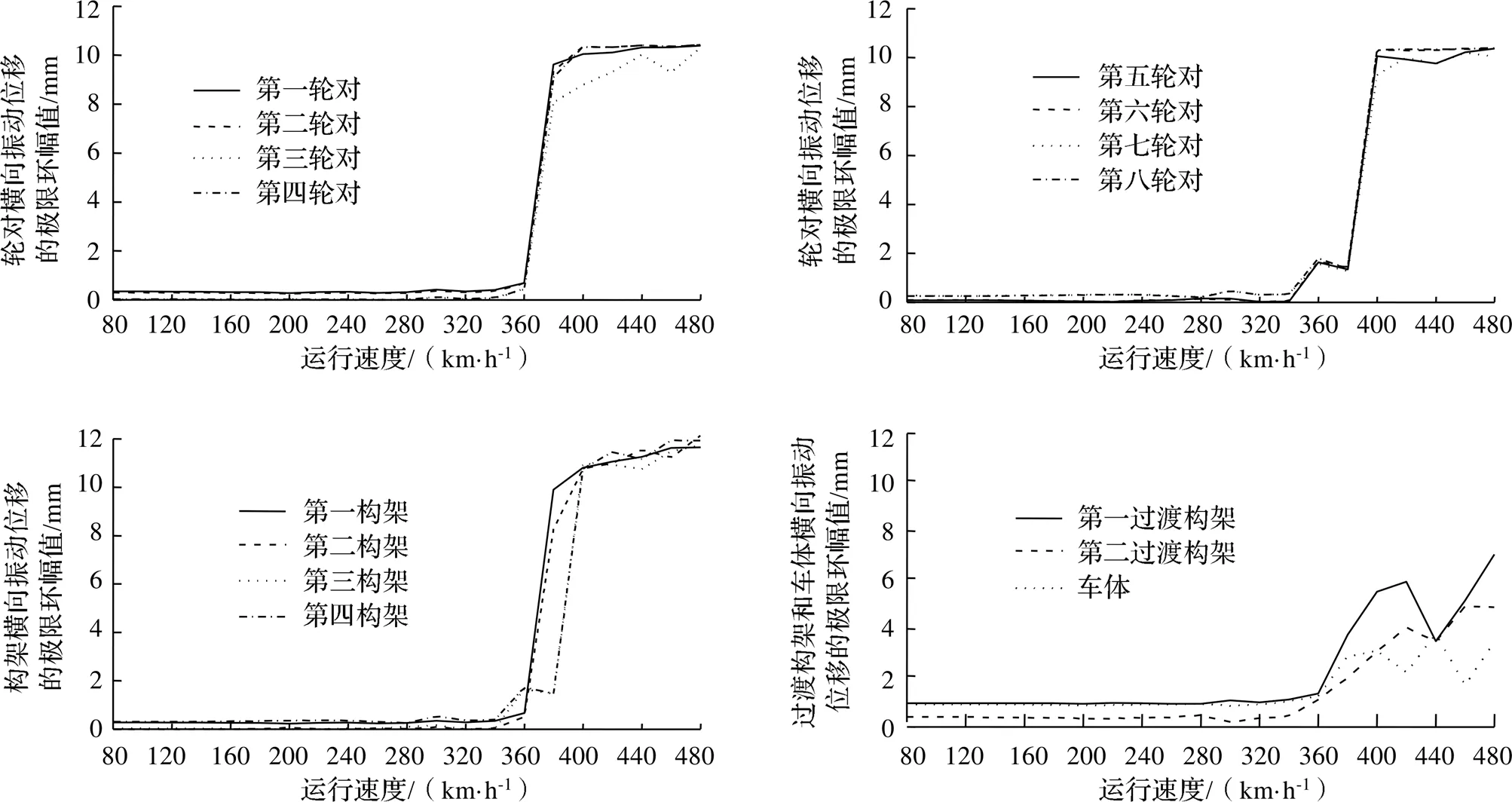
图3 空车工况下刚体横向振动位移的极限环幅值变化
3.3 动力车的运行平稳性
动力车运行平稳性的计算是在时域中进行的,采用美国AAR6级线路的不平顺时域谱,包括左、右轨的横向不平顺和垂向不平顺。运行平稳性的计算结果主要有动力车前、后端的振动加速度、平稳性指标、各轮对的垂向轮轨力和轮轨横向力。
依据GB 5599-1985,平稳性指标小于2.5时,动力车的运行平稳性评定等级达到优良;EN 14363标准5.3.2款中也对动力车运行过程中振动加速度和轮轨力的极限值作出了规定:车体的横向和垂向振动加速度最大值应当不超过2.5 m/s2;轮轨垂向力评定值按式(1)计算,轮对横向力采用2 m滑动平均处理,评定值按式(2)计算:
lim=90+0(1)

式中:0为静轴重,kN;为与车辆类型有关系数,机车、客车、轨道车取1。
经计算得出,动力车空车工况下轮轨垂向力的极限值为180.25 kN,轮对横向力的极限值为40.08 kN;满载工况下轮轨垂向力的极限为250.39 kN,轮对横向力的极限值为63.46 kN。EN14363标准中对轮轨垂向力的公式计算极限值还有其它规定,当机车运行速度在250~300 km/h时,垂向轮轨力的计算评定值不得超过170 kN。综上,动力车各工况下的垂向轮轨力不得超过170 kN。
动力车在美国AAR6级线路上,运行速度为60~300 km/h时,车体前、后端的垂向和横向平稳性指标如图5所示,前、后端的垂向和横向振动加速度如图6所示,各轮对的垂向轮轨力和轮对横向力如图7所示。
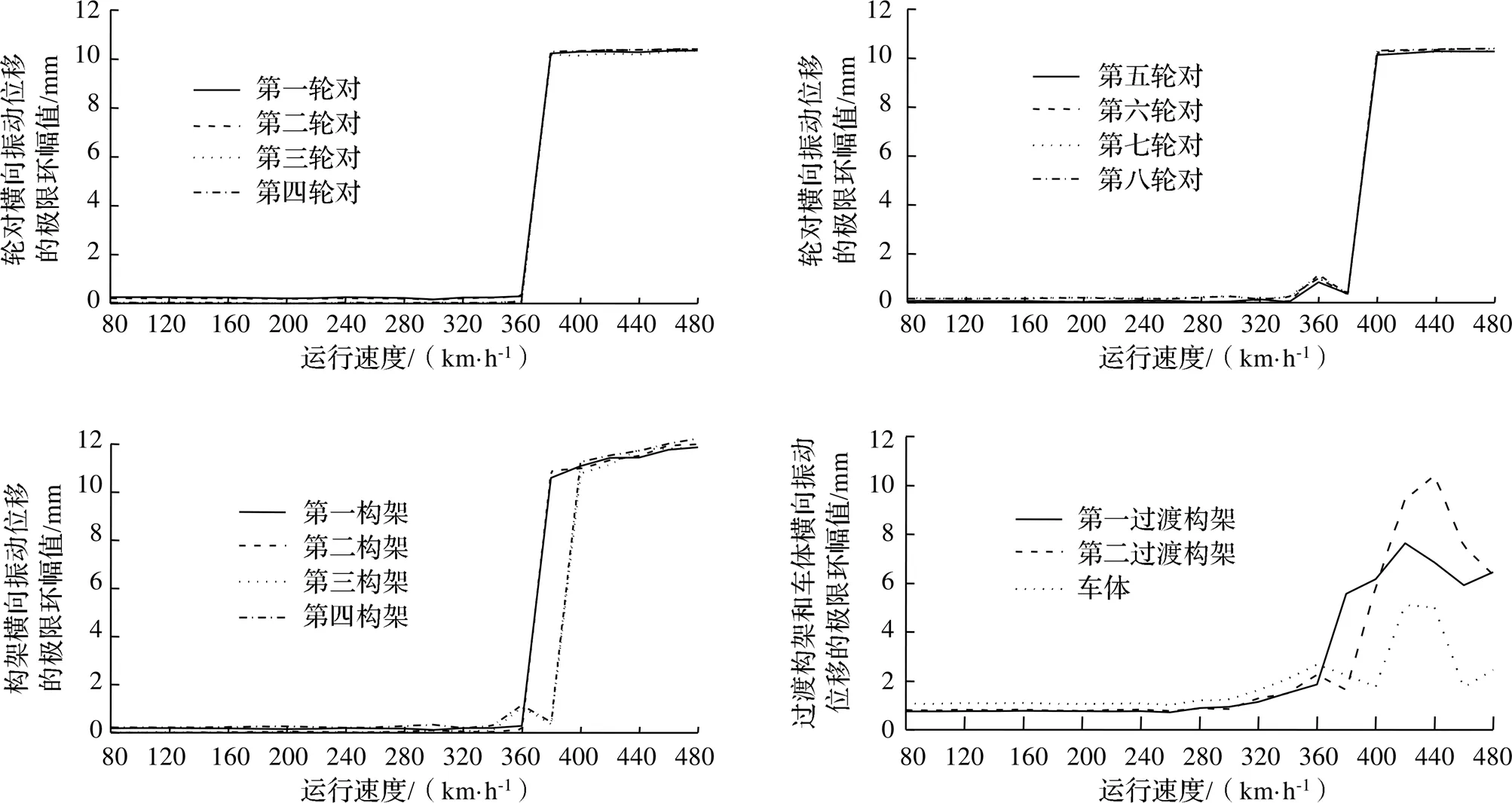
图4 满载工况下刚体横向振动位移的极限环幅值变化
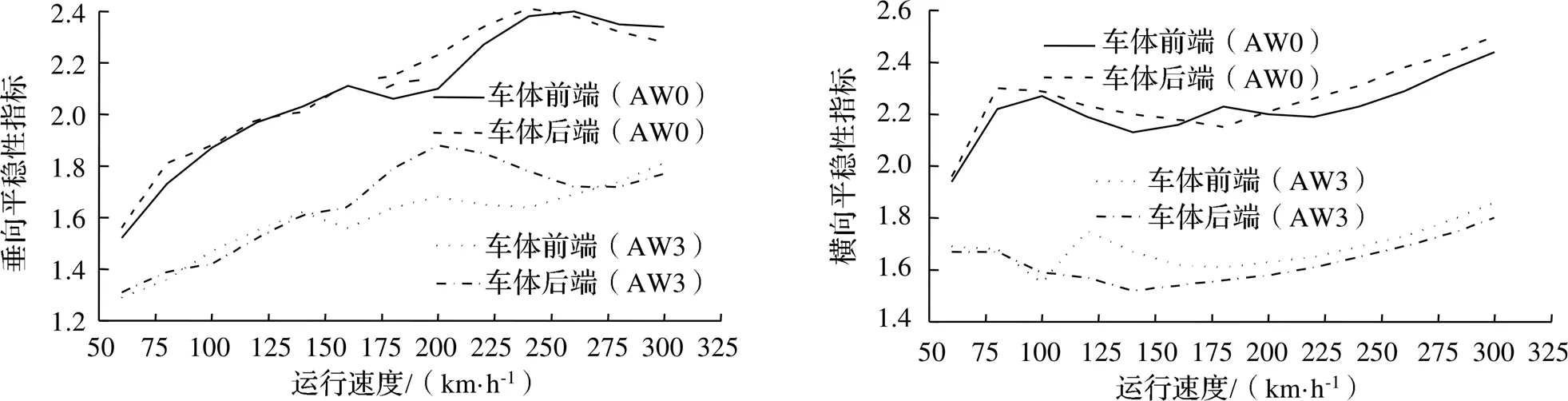
图5 动力车的运行平稳性指标
动力车在美国AAR6级线路上具有优良的运行平稳性,动力车空车和满载工况下,当运行速度为60~300 km/h时,车体前、后端的垂向和横向平稳性指标为优;车体前、后端的垂向和横向振动加速度最大值均小于其极限值2.5 m/s2;车轮垂向力的统计最大值均小于其极限值170 kN;空车工况的轮对横向力均小于其极限值40.08 kN;满载工况的轮对横向力均小于其极限值63.46 kN。
3.4 动力车的动态曲线通过性能
动态曲线通过是考察动力车在动态通过曲线的过程中,轮轨导向力、轮对横向力、轮重减载率、脱轨系数等各项动力学指标的统计最大值。该过程的动力学指标一般认为由两部分组成,一部分取决于线路本身的结构参数变化,代表动力车的准静态曲线通过性能;另一部分由线路不平顺带来的激扰引起。对这一过程的动力学指标值进行统计分析,取各项指标的均值来描述曲率半径、外轨超高等线路本身因素引起的动力学指标的大小;取动力车在圆曲线上各项指标的三倍标准偏差来描述由线路不平顺激扰引起的动力学指标变化范围的大小。
500 m半径的曲线通过计算是在由30 m直线、120 m缓和曲线、200 m圆曲线、120m缓和曲线和30m直线组成的一段完整的曲线上进行的,线路无轨距加宽。曲线上具有美国AAR6级线路不平顺。动力车通过速度为60 km/h、70 km/h、80 km/h、90 km/h、100 km/h,外轨超高为120 mm。这时,各通过速度下的过超高(负值)或者欠超高(正值)分别为-35 mm、-4 mm、31 mm、71 mm、116 mm。
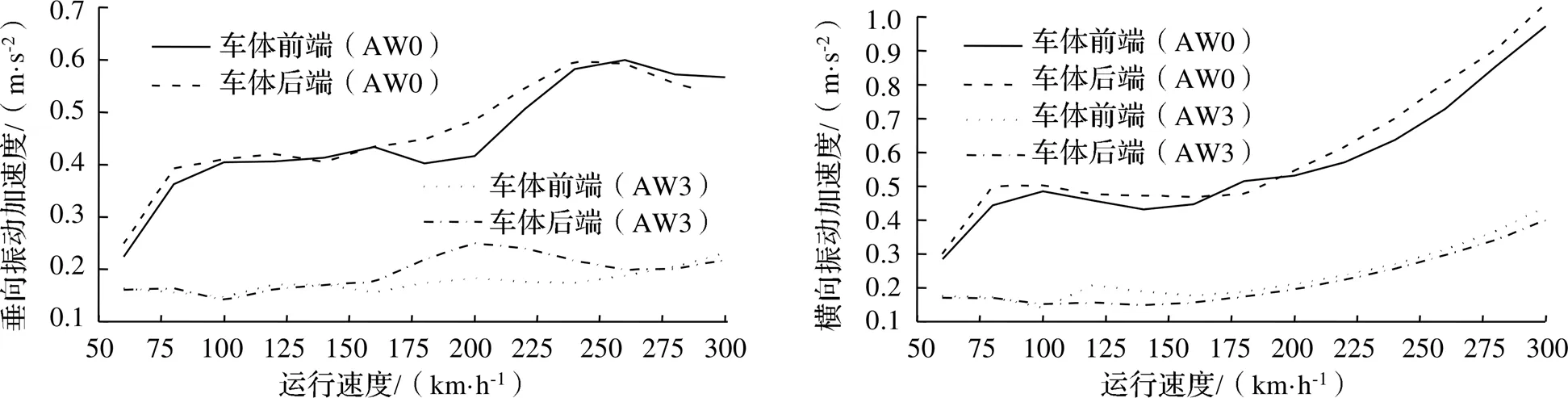
图6 动力车前后端的振动加速度
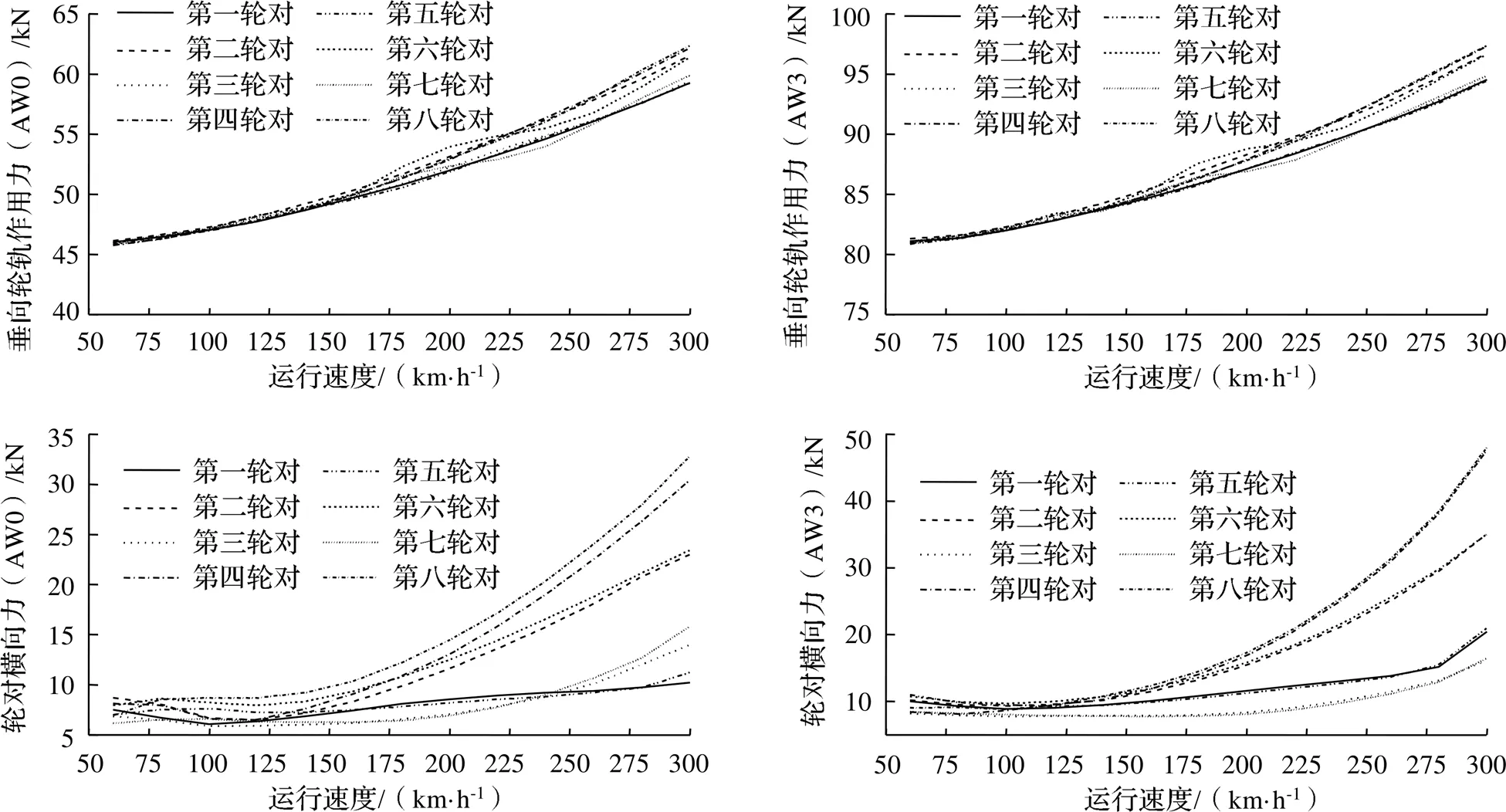
图7 动力车的轮轨作用力
如表1所示,动力车在美国AAR6级线路上能够以100 km/h的速度安全通过具有120 mm外轨超高的500 m半径曲线,第一轮对的横向力、车轮垂向力的统计最大值远低于其极限值,轮重减载率小于0.6,脱轨系数小于0.8,满足相关标准要求。
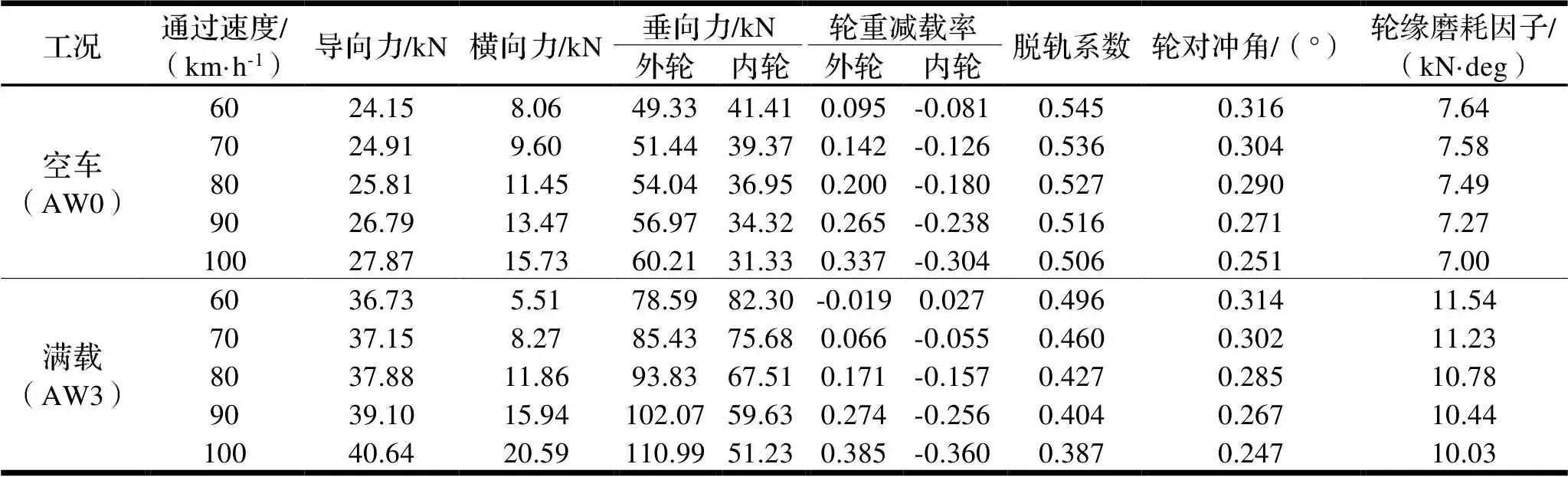
表1 动力车在两种工况下通过500 m圆曲线时第一轮对的动力学指标统计最大值
4 结论
B0B0轴式转向架应用在重载高速动车组上的研究在国内还是首次,该多台转向架组合承载车体的转向架群方案能够有效控制动力车的轴重,实现重载高速转向架群动车组在现有客运线路上的高速运行。通过动力学分析可得出:
(1)动力车空车工况的线性临界速度为380 km/h,满载工况线性临界速度为400 km/h;
(2)动力车空车和满载工况的非线性临界速度都能达到360 km/h,满足设计要求;
(3)动力车空车和满载工况在美国AAR6级线路上,以60~300 km/h的速度运行时,具有优良的运行平稳性。车体前后端的垂向和横向平稳性指标都达到了优,车体前后端垂向和横向振动加速度的统计最大值、车轮垂向力的统计最大值、轮对横向力的统计最大值均小于其极限值,满足相关设计标准要求;
(4)动力车空车和满载工况具有良好的曲线通过性能,能够以100 km/h的速度安全通过美国AAR6级线路的500 m半径圆曲线,车轮导向力和轮对横向力的统计最大值远小于其极限值,轮重减载率小于0.6,脱轨系数小于0.8,轮缘磨耗因子较小,满足相关设计标准的要求。
[1]陈康,罗赟,金鼎昌. 2B0架悬式动力车运行平稳性和蛇行稳定性[J]. 西南交通大学学报,2003(1):28-33.
[2]罗仁,石怀龙. 铁道车辆系统动力学及应用[M]. 成都:西南交通大学出版社,2018.
[3]谢青. 单节八轴机车用B0+B0四轴转向架的研制[C]. 中国铁道学会:铁路重载运输技术交流会论文集,2014:7.
[4]巴利斯·鲁科夫,李翀翎. 俄罗斯铁路新型机车的设计和研制[J]. 中国铁路,2007(1):67-69.
[5]钟文生,姚远,张红军. 单节八轴机车转向架动力学研究[J].机械,2014,41(08):1-5,49.
[6]秦超,陈康,李玉清. 200 km/h八轴交流传动机车的横向稳定性分析研究[J]. 铁道机车与动车,2016(12):24-28.
[7]鲍维千. 内燃机车总体及走行部[M]. 北京:中国铁道出版社,2004.
[8]张红军,王自力. 我国200 km/h客运机车的动轴数分析[J]. 铁道机车车辆,2006(3):1-3.
[9]计强,张红军,谢青,等. Uai2B0+B0-B0+B0轴式八轴机车转向架设计[J]. 铁道机车与动车,2013(10):11-14,4.
[10]国家标准局. GB 5599-1985 铁道车辆动力学性能评定和试验鉴定规范[S]. 北京:中国计划出版社,1985.
[11]BSI Standards Publication. EN 14363 Railway applications- Testing and Simulation for the acceptance of running characteristics of railway vehicles-Running Behaviour and stationary tests[S]. London:British Standards Press,2016.
Dynamic Performance Prediction of B0B0-B0B0Wheelset Arrangement Heavy-Load and High-Speed Bogie-Group Power Car
YIN Zhihui1,WANG Jiaxin1,WANG Qi1,ZHOU Qiang2,HU Chen2
(1.CRRC Tangshan Co., Ltd, Tangshan 063000, China; 2.State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China )
The main structural characteristics of a heavy-load and high-speed bogie-group power car are introduced. Based on the main technical parameters of the power car, the multi-body dynamic calculation model of the power car is established through SIMPACK. The dynamic performance including the stability, riding quality and curving performance of the whole vehicle under two working conditions of empty vehicle (AW0) and full load (AW3) is calculated and analyzed, and the overall performance of the vehicle is evaluated according to the relevant evaluation standards of railway vehicles. The results show that the B0B0-B0B0wheelset arrangement heavy-load and high-speed bogie-group power car has excellent linear dynamic performance and curving performance, and can realize high-speed transportation on existing passenger lines.
B0B0-B0B0wheelset arrangement;bogie-group;power car;dynamic performance
U266.2
A
10.3969/j.issn.1006-0316.2021.03.007
1006-0316 (2021) 03-0039-07
2020-06-05
尹智慧(1987-),男,河北唐山人,硕士研究生,工程师,主要研究方向为车辆系统动力学、车辆系统动力学仿真及线路测试。*通信作者:周强(1991-),男,湖北襄阳人,硕士研究生,主要研究方向为车辆系统动力学,E-mail:869252217@qq.com。
猜你喜欢
军民两用技术与产品(2021年1期)2021-07-28
数学物理学报(2021年3期)2021-07-19
铁道通信信号(2020年6期)2020-09-21
工程与建设(2019年5期)2020-01-19
厦门理工学院学报(2016年1期)2016-12-01
电源技术(2016年9期)2016-02-27
湘潭大学学报(哲学社会科学版)(2015年5期)2015-11-25
汽车科技(2014年6期)2014-03-11
振动、测试与诊断(2014年1期)2014-03-01
客车技术与研究(2014年5期)2014-02-28