基于倾斜影像颜色信息的建筑物点云提取
2021-05-12 07:38:16余和顺
东华理工大学学报(自然科学版) 2021年2期
余和顺, 刘 荣
(东华理工大学 测绘工程学院, 江西 南昌 330013)
随着无人机航摄技术的不断发展,使用无人机采集信息成为了一种趋势(许亚男等,2020)。无人机获取数据具有成本低和适用范围广的特点(陶国强等,2019),许多城市利用其获取的倾斜影像进行实景三维重建。但实景三维模型只是“一张皮”,并不能进行编辑和分析 (胡平波,2019)。因此需要进行建筑物单体建模,使其达到“可编辑”、“可分析”的要求。
目前,基于倾斜摄影的建筑物单体建模方法主要有:①二维矢量面叠加到城市Mesh网格进行动态渲染(陈良超等,2018);②根据建筑物二维矢量面对城市Mesh网格进行物理分割(王勇等,2018);③从多视图像(MVS)点云中提取建筑物单体点云,再对点云进行重建(Li et al.,2016; Nan et al., 2017)。其中动态渲染方法不能将建筑物与其他地物物理分离;矢量分割方法在分离建筑物的过程中建筑物底面存在锯齿,且会破坏模型原有的多细节层次(聂赞等,2019);而点云重建方法能最大程度实现建筑物单体重建。作为建筑物单体重建的前提,建筑物点云提取质量直接影响建筑物单体模型的质量。
相比激光点云,MVS点云有自带颜色信息,获取成本低的优点。因此笔者选用MVS点云为研究对象,根据点云颜色信息和植被密集成块的特性提出一种植被点云剔除方法,结合点云滤波和点云分割对建筑物点云进行提取。
1 建筑物点云提取方法
基于倾斜影像颜色信息的建筑物点云提取方法,提取步骤如图1所示。
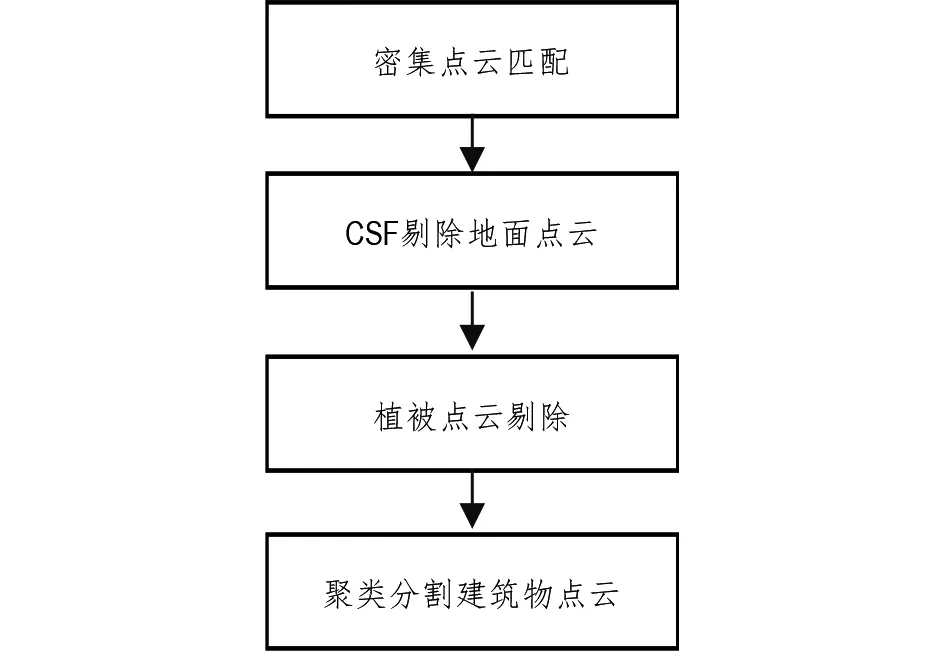
图1 建筑物点云提取流程图
1.1 布料模拟滤波(CSF)
点云分为地面点云和非地面点云(地物点云)。采用CSF(Zhang et al.,2016)方法分离出非地面点云,原理如图2所示。假定有一块倒置的地形模型,其上平铺具有一定硬度的布料,在重力作用下与地形模型贴合,此时的布料形态就是数字地面模型(DTM)。同理,点云可视为离散化的地形模型,将布料模型(布料为一个具有质量和相互连接的粒子组成的网格模型)铺在倒置的点云上。由于重力和布料粒子间的相互作用力,使得布料粒子与地面点的间距较小,与非地面点的间距较大,设置距离阈值(Hcc)可分离出地面点和非地面点。

图2 CSF滤波原理图
CSF通过调整布料网格分辨率(GR)、时间步长(dT)、布料刚性(RI)和距离阈值(Hcc)来适应不同地形的点云。GR用来控制布料模型的粒子个数;dT控制每次迭代时布料粒子下降的位移;RI控制布料的柔软度;Hcc用来分离地面点和非地面点的阈值。目前,基于无人机点云滤波算法中,CSF算法效果较好(Serifoglu et al.,2018)。
1.2 基于颜色信息的绿色植被点云剔除
建筑物点云提取过程中,剔除地面点云后,仍有许多影响建筑点云提取的植被点云。为了剔除植被点云,陈宇等(2016)使用基于高程统计的方法,首先绘制地物点云的高程频率直方图,然后根据高程频率直方图与个人经验,确定植被高程阈值,剔除植被点云。该方法易于操作,但只适用于较平坦和植被点云高程较为统一的地区。邓飞等(2018)使用单波段颜色阈值分割的方法剔除植被点云,通过采样分析建筑物与植被在RGB各个波段中灰度分布范围,按照错分概率最小原则选择波段和分割阈值。该方法能较好地剔除植被点云,但存在剔除大量建筑物点云的缺点。笔者采用过绿指数(EXG)并结合植被点云密集成块的特性剔除植被点云,能较好地剔除植被点,并几乎完整保留建筑点。
EXG常被用于图像的植被盖度检测,它可以在各种不同的背景下较为有效检测出黄绿色和绿色植被(丁肖等,2017; Torres-Sánchez et al.,2014; 徐金勤等,2018)。采用EXG进行植被检测,同时考虑植被点云密集成块的特性,即在点Pi的σ邻域内,若绝大多数点为植被点,则点Pi有较大概率为植被点,若绝大多数点为非植被点,则点Pi有较大概率为非植被点。EXG模型公式如下:
I=2g-r-b
(1)
式中,I为过绿指数,r=R/(R+G+B),g=G/(R+G+B),b=B/(R+G+B),R、G、B为点云红绿蓝的颜色值,范围为0~255。
经CSF滤波后得到非地面点云{Pi},根据式(1)计算{Pi}中每个点的I,I大于阈值T的点被认为是植被可疑点,否则为非植被可疑点。对点云中的点Pi进行σ邻域搜索,统计邻域内植被可疑点的个数,若大于阈值M,则将Pi点分类为植被点,否则为非植被点,如图3所示,重复以上步骤,直至点云{Pi}中所有点都被分类。植被点云具体剔除流程如图4。

图3 基于颜色信息的植物滤波原理图

图4 植被点云剔除流程图
1.3 DBSCAN聚类分割建筑物点云
经滤波和植被点剔除后的剩余点云由建筑物点、少量未被剔除的非密集植被点以及路灯汽车等小点云构成。笔者使用具有噪声的基于密度的空间聚类方法(DBSCAN)进行建筑物点云分割,进而提取建筑物点云。
DBSCAN(Ester et al.,1996)是一种能发现任意形状的聚类,具有ε和Tmin两个参数。ε为定义密度时的邻域半径,Tmin为定义核心点时的阈值(陈宇等,2016)。DBSCAN的原理如图5所示。

图5 DBSCAN的原理图
核心对象:假设点云数据集为D,对点p∈D进行半径ε的邻域搜索,若点p的ε邻域内包含的点的个数大于给定阈值Tmin,则确定该点为核心点。
密度直达:若点p1是核心点p的ε邻域内的点,则p1由p密度直达。
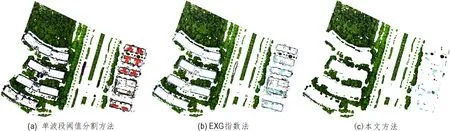
密度可达:若有一系列点p1,p2,…,pn,且pi+1(i 密度相连:若存在某核心点px属于D,使得px到p、pa都密度可达,则p和pa密度相连。 DBSCAN聚类是以一个核心点为出发点,将这个核心点与其所有密度相连的点归为一个簇。 笔者对提出的建筑物点云提取组合方法进行实验,实验对象选取为地势起伏较大的东华理工大学南区宿舍及范家新村的部分区域。实验区域影像数据由飞马D200四旋翼无人机搭载D-OP300五镜头倾斜模块于2019年5月采集获得。使用ContextCapture软件对数据进行影像密集匹配,设置点采样间隔为20像素,选取部分点云(图6)作为实验数据,在MSV点云中提取建筑物。 图6 实验点云 通过CloudCompare封装的CSF算法(Zhang et al.,2016)进行地面点剔除,分离非地面点云,实验结果如图7所示。结果显示,非地面点被较好分离。在植被点剔除过程中,参数T、σ、M分别取0、1.5、45时能较好地剔除植被点云。使用单波段阈值分割法(邓飞等,2018)和EXG指数法作对比实验,实验结果如图8所示。结果表明相较于单波段阈值分割法和EXG指数法,在较好剔除植被点的基础上,本方法剔除的建筑点更少。 图8 剔除的植被点云 图7 非地面点云 剔除植被点后,对剩余点云进行DBSCAN聚类分割。DBSCAN聚类参数ε和Tmin分别设定为0.5和5,得到的聚类结果如图9所示。由图9(a)、(d)可知,单波段阈值分割法将少量植被点错分为建筑物点,但遗漏了大量建筑物点;由图9(b)、(e)可知,EXG指数法不仅错分为建筑物的点比单波段阈值分割法多,且也遗漏了大量建筑点;由图9(c)、(f)可知,本方法虽错分为建筑物的点比其他方法稍多,但建筑物提取基本完整。 图9 聚类分割后的建筑物点云 为了定量评价建筑物点云提取效果,对建筑物点云提取的正确性、完整性和质量精度进行评价(戴玉成,2017)。 (2) 其中,A表示正确性,P表示完整性,Q表示质量精度,TP表示正确识别建筑物点云的个数,FP表示被错认为建筑物点云的非建筑物点云个数,FN表示遗漏的建筑物点云个数。 使用人工分割出的建筑物点云作为参考点云进行比较,得到各种方法提取建筑物点云的精度,如表1所示。由表1可知,笔者采用的建筑物点云提取方法的正确性为98.06%、完整性为98.20%、质量为96.34%。相较于单波段阈值分割法,其正确性降低了1.81%,完整性提高了28.47%,质量提高了26.67%。相较于EXG指数的方法,其正确性降低了1.05%,完整性提高了16.71%,质量提高了15.44%。笔者提取建筑物点云方法的正确性、完整性和质量上均大于96%。综合比较,使用笔者提出的建筑物点云提取方法会获得更好的效果。 表1 建筑物点云提取精度 笔者利用EXG指数和植被点云密集成块特性,提出了一种从影像密集匹配的点云中提取建筑物点云的组合方法。该方法简单易于实现,充分利用了密集匹配点云的颜色信息,可以在保留建筑点较完整的情况下剔除尽量多的植被点,且建筑物点云提取的正确性、完整性和质量均高于96%,建筑物点云提取效果好。但该方法设置的参数值是经验阈值,因此如何快速设置理想参数有待进一步研究。2 实验与分析
2.1 实验数据

2.2 实验结果


2.3 精度分析

3 结论
猜你喜欢
河北地质(2022年2期)2022-08-22 06:24:04
数学小灵通(1-2年级)(2022年3期)2022-03-17 06:18:28
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
山东冶金(2019年5期)2019-11-16 09:09:36
自动化学报(2018年7期)2018-08-20 02:59:04
现代园艺(2017年23期)2018-01-18 06:58:12
周口师范学院学报(2016年5期)2016-10-17 06:36:47
应用海洋学学报(2015年2期)2015-11-22 07:36:28
爱你(2015年2期)2015-11-14 22:43:29
天津冶金(2014年4期)2014-02-28 16:52:58