高应力条件下医用机器人关键共性技术标准专家共识
2021-05-11 09:10中华医学会整形外科分会数字化外科学组上海生物医学工程学会医用机器人专业委员会
组织工程与重建外科杂志 2021年2期
中华医学会整形外科分会数字化外科学组(筹) 上海生物医学工程学会医用机器人专业委员会
完善的标准体系将加快医疗器械现代化和智能化的步伐,世界各医疗器械产业强国都建立了众多的标准,从而掌握话语权,可以说医疗器械标准化建设水平是衡量医疗器械产业现代化水平的“标尺”。中国制造医疗器械要想拥有国际地位,必须着力提升医疗器械工业现代化水平和“中国标准”的国际影响力,并为之做出积极贡献。目前,国内医用机器人产品标准研究与国外先进国家基本处于同步水平,当务之急是加快手术机器人标准制定及修订速度[1-2]。
2018年9月, 全国医用电气标准化技术委员会医用电子仪器标准化技术委员会归口的《采用机器人技术的辅助手术设备和辅助手术系统》已完成草案,形成征求意见稿,本文作者团队全程参与了该标准的制定。但是,由于应用于骨组织手术的机器人主要进行钻孔、磨削、截骨等操作,属于高应力的一种状态,上述标准并未对这一状态的机器人辅助设备进行相应的规范,国际学术界亦未建立高应力条件下医用机器人的专用标准,并且尚未对高应力条件进行明确定义。为满足医疗器械法规要求,以高应力条件下医用机器人为切入点,结合技术特点及临床需求,对相应的评价指标及评价方法给出建议刻不容缓。
本文中的“高应力条件下医用机器人”并不是这类设备的通用名称,而是针对复杂应力条件环境的医用手术机器人。比如,骨组织手术机器人在实际执行手术时受到的外力比较大,机器人的刚度直接影响手术效果,因此以“高应力”突出该类设备区别于其他医用电气设备的技术特点。与其他类型的医用机器人相比,此类手术机器人具有较为特殊的应用范围,其实际应用范围较为广泛,相关标准的制定具有极为重要的意义。
本文基于医工交叉领域的研究成果,在国内外医用机器人标准的基础上进行了进一步扩展,通过对医用机器人产品全生命周期的软硬件规范和要求进行界定和验证,最终形成可供其他医用机器人参考的技术标准体系,以促进相关产业的良性发展[3-4]。
1 范围
本专家共识适用于在高应力条件下采用机器人技术的辅助手术设备和辅助手术系统(以下统称“RA设备”)。
2 规范性引用文件
目前,在工业制造领域已有公认的标准工业机器人安全标准(如ANSI/RIA R15.06-2012);在医疗器械领域,针对医用机器人的专用安全标准YY9706.277正在转化中,其修改依据采用IEC80601-2-77。此外,为满足医疗器械法规要求,还需满足通用的医疗器械安全标准GB9706.1-20XX中医用电气设备第1部分:基本安全和基本性能的通用要求(修改采用IEC60601-1)和YY0505-20XX中医用电气设备第1-2部分:基本安全和基本性能的通用要求,并列标准:电磁兼容要求和试验(修改采用IEC60601-1-2)的适用条款,软件的生命周期过程需满足YY0664(修改采用IEC62304)。
由于高应力条件下医用机器人首先是属于医疗器械范畴,同时手术机器人包括有源的控制系统、导航系统、机械臂、手术末端,其中很多部件和软件都可以独立成套,例如机械臂夹持的手术末端、手术导航系统等,因此必须同时遵守各部件已经形成的医疗器械标准的适用条款,如GB9706.4对高频手术设备的专用要求,GB9706.15对医用电气系统的要求等。其中的核心部件机械臂的标准可参考工业机器人相关的标准,如GB/T 12642-2013工业机器人性能规范及其试验方法、GB 11291工业机器人安全要求等。
3 术语和定义
3.1 位置准确度(Positioning accuracy)
如图1所示,位置准确度即从同一方向接近某一指令位姿的位置Oc与实到位置集群中心G之差(APp)。

图1 位置准确度和重复性Fig. 1 Positioning accuracy and repeatability
3.2 姿态准确度(Orientation accuracy)
如图2所示,姿态准确度就是从同一方向接近某一指令位姿的姿态与实到姿态平均值之差(APa,APb,APc)。
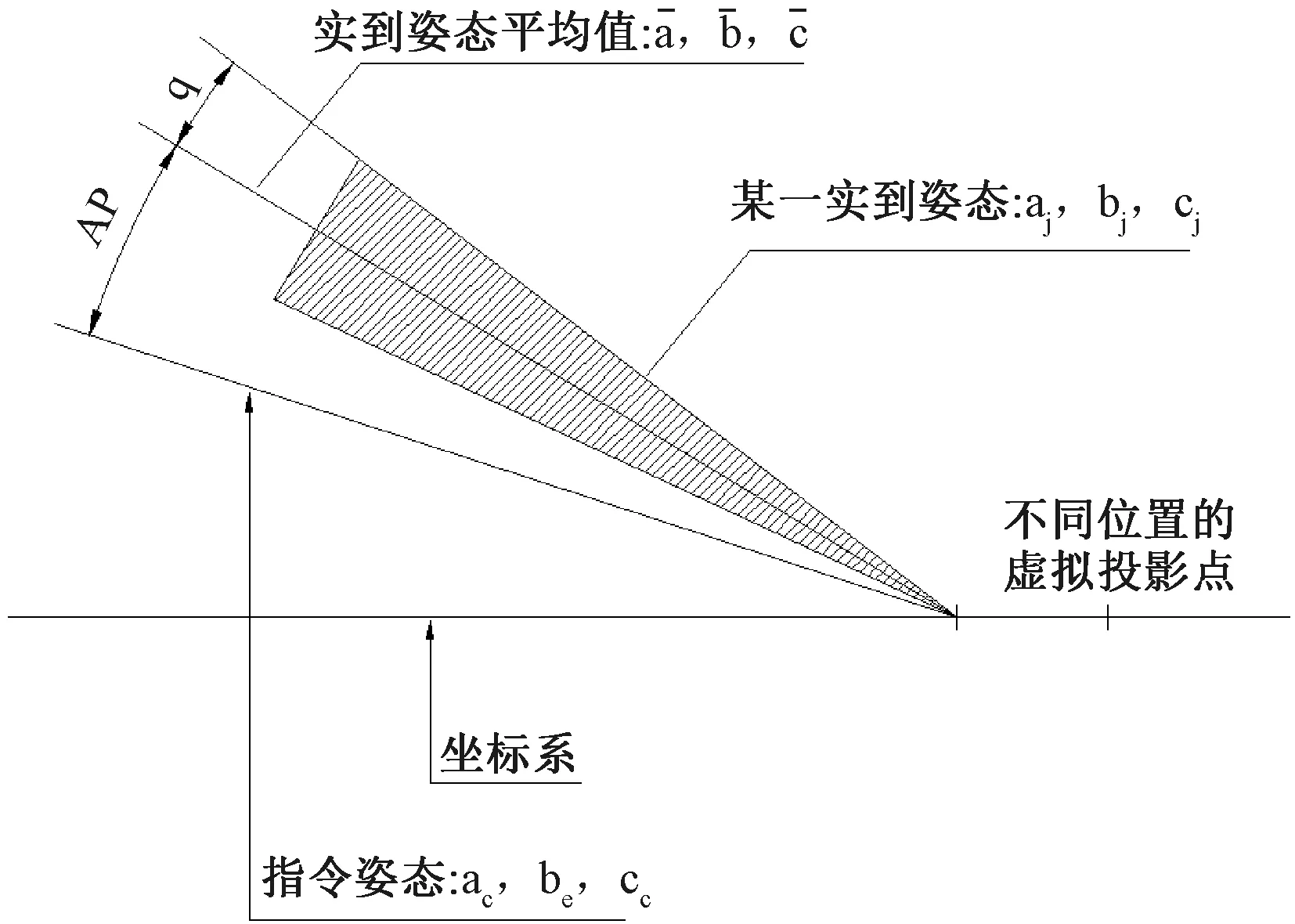
图2 姿态准确度Fig. 2 Orientation accuracy
3.3 位置重复性(Positioning repeatability)
图1中,同一指令位姿从同一方向重复到达n次后实到位置的一致程度,以位置集群中心为球心的球半径RP1之值即为位置重复性。
3.4 位姿(Pose)
空间位置和姿态的合称。通常指末端执行器或机械接口的位置和姿态。
3.5 指令位姿(Command pose)
为定义设备特定的任务而编制的运动程序所给定的位姿。
3.6 机械臂有效操作力(Effective operation force of robotic arm)
在正常工作状态下,由机械臂与末端执行器共同输出的作用力。
3.7 额定负载(Rated load)
正常条件下,作用于机械接口且不会使设备性能降低的最大负载。
3.8 末端执行器(End effector)
为使设备完成其手术任务而安装在机械接口处的装置。
3.9 末端执行器参考点(End effector reference point)
为一定用途而在末端执行器上设定的参考点。试验时一般以末端执行器最后一个关节轴线几何中心为测量参考点。
3.10 末端执行器参考坐标系(End effector reference frame)
为一定用途而在末端执行器上设定的参考坐标系。试验时一般定义在末端执行器参考点上。
3.11 标定手指(Calibrate finger)
标定手指为具有测量点并可与设备配合的装置,测量点位置和直径根据实际需求设计。
4 手术机器人布局
为了保证手术机器人能够在有效工作空间内使用,制造商应在随机文件中规定手术机器人的最佳布局位置。图3显示了骨组织手术中机器人的手术器械布局示意。
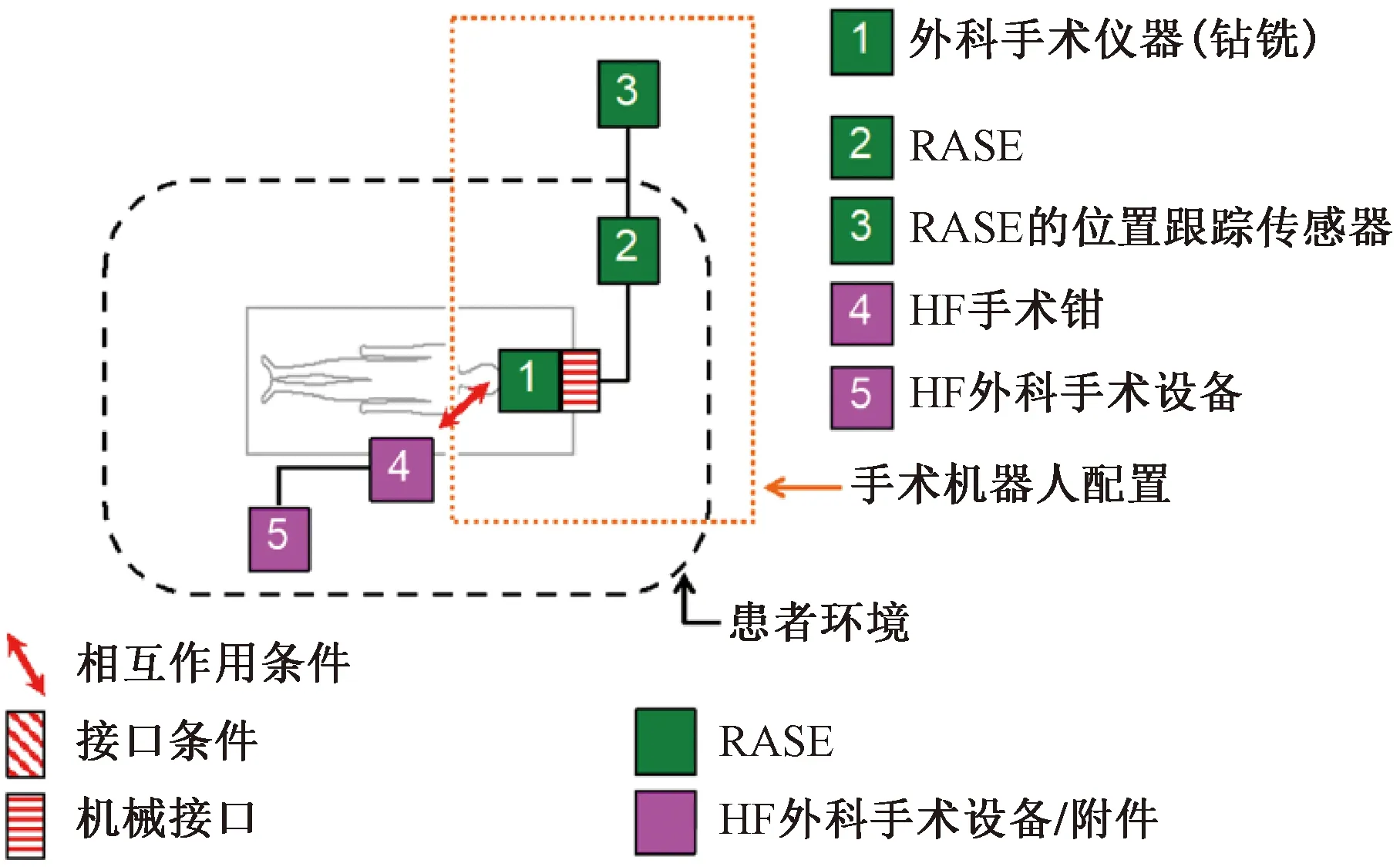
图3 手术机器人布局实例:骨头钻铣用例Fig. 3 Surgical robot layout example: Bone drilling and milling case
5 高应力条件下的医用机器人操作精度要求
手术机器人实现高精度手术,需满足一定的精度要求。例如:导航引导下的手术机器人,通常考量位置准确度、位置重复性、系统跟踪定位精度等指标。
5.1 位置准确度(图4)
①按说明书的要求连接并启动设备;②将标定手指按要求安装在末端结构上,控制设备运动,使标定手指测量点放置到有效工作空间中任意位置;③在设备有效工作空间内选定尽量大的立方体上的8个顶点A、B、C、D、E、F、G、H和1个中间点J,从A点出发在设备控制软件上输入机座坐标增量,控制设备运动使标定手指测量点分别运动到B~J点; ④每次运动完成,用三维测量仪测量标定手指测量点坐标值;⑤计算点A与其他各点的距离XA;⑥计算XA与对应的理论距离的差值,即为机器人绝对定位误差,各点误差均应符合要求。
式中:X为B、C…J。
EXA=|X′A′-XA|

图4 机器人绝对误差测量空间示意Fig. 4 Schematic diagram of robot absolute error measurement space
5.2 位置重复性
①按说明书的要求连接并启动设备;②将标定手指按要求安装在设备末端机构上,控制设备运动,使标定手指测量点放置到有效工作空间中任意位置A;③软件记录设备当前位姿,用维测量仪测量当前标定手指测量点的位置坐标A0(XA0,YA0,ZA0);④控制设备运动,使标定手指测量点放置到有效工作空间中任意不同位置B,软件记录设备当前位姿,用三维测量仪测量当前标定手指测量点的位置坐标B0(XB0,YB0,ZB0);⑤控制设备运动,使标定手指测量点运动到A位置,同样方法再次记录位置坐标A1;⑥控制设备运动,使标定手指测量点运动到B位置,同样方法再次记录位置坐标B1;⑦重复步骤⑤、⑥,获得位置坐标Ai(XAi,YAi,ZAi)和Bi(XBi,YBi,ZBi),i=1,2,3,4,5,即为机器人重复定位误差;⑧计算空间距离。
5.3 系统跟踪定位精度(图5)
①根据选择的导航系统类型,将图中所示的检验工装放置在设备及光学跟踪设备或者磁导航设备的有效工作空间内,按图所示要求建立三维测量仪的测量坐标系;②采用三维测量仪点触检验工装上立柱A上端测试点中心,记录坐标值A0;③移开立柱A,软件控制设备使标定手指测量点到达立柱A上端测试点中心所在位置;④用三维测量仪点触设备的标定手指测量点中心,记录坐标值A1,计算A0和A1的空间距离A0A1,即为本次测量的系统空间跟踪定位误差值;⑤对检验工装上B、C、D、E、F等其他5个立柱(共6个立柱),重复步骤②~④,所得定位误差值均应符合产品技术要求;⑥移动检验工装位置至工作空间内的另一位置,重复步骤②~⑤,所得定位误差值均应符合产品技术要求。
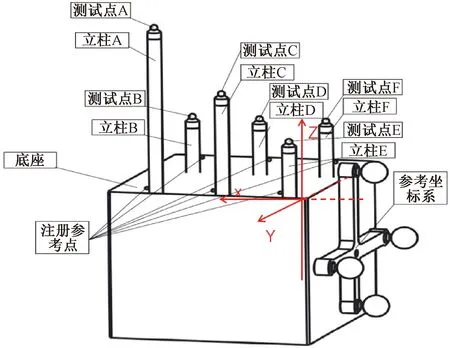
图5 视觉导航系统精度工装Fig. 5 Visual navigation system precision tooling
系统精度检测工装由底座、立柱、测试点、注册参考点、参考坐标系等部分组成。底座和立柱由医学影像中较难成像的材料制成(如底座为PMMA制成、立柱为空心的碳纤维管和工程塑料制成),且这些材料没有磁性,不会对磁导航系统产生影响。测试点和注册参考点由在医学影像中成像清晰的材料(如不锈钢)制成的球或者凹陷面,测试点直径为自定义。参考坐标系采用与设备相应部件相同规格的部件。试验时,按照图中的要求安装,测量点分别放置于相应的立柱上,根据被测产品特性设置参考坐标系和注册参考点(图6)。
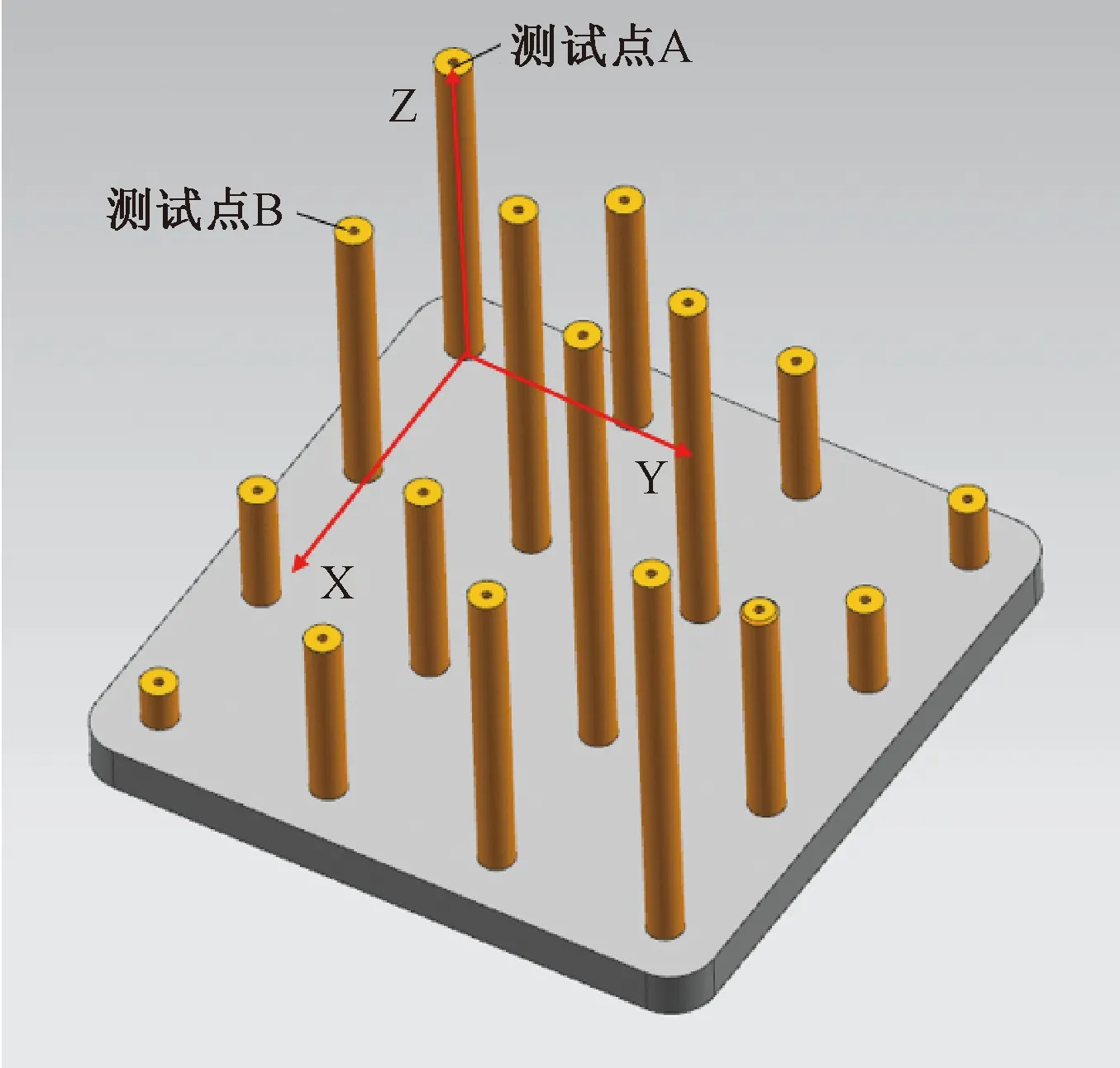
图6 采用凹陷面方式的磁导航检测工装Fig. 6 Magnetic navigation testing tooling with concave surface mode
6 声明
由于本领域的应用范围和技术尚在不断发展中,本文所规定的技术特点和试验方法只能基于现有产品进行定义和设计,对于充分考虑风险后采用的新技术和方法,不应被本文内容限制。在这些情况下,本文可作为有益的引导和参考,而不应视为强制性规范使用。
参与者名单(所有参与者对本文均有相同的贡献)
柴岗,林力,张艳,杨娴娴,徐海淞
200011 上海市 上海交通大学医学院附属第九人民医院整复外科
Department of Plastic and Reconstructive Surgery, Shanghai Ninth People's Hospital, Shanghai Jiao Tong University School of Medicine, Shanghai 200011, China
祁佐良
100144 北京市 中国医学科学院整形外科医院
Department of Craniomaxillofacial Surgery, Plastic Surgery Hospital, Chinese Academy of Medical Science, Peking Union Medical College, Beijing 100144, China
郭澍
110053 沈阳市 中国医科大学附属第一医院整形外科
Department of Plastic Surgery, The First Hospital of China Medical University, Shenyang 110053, China
沈卫民
210008 江苏省南京市 南京医科大学附属儿童医院烧伤整形外科
Department of Burn and Plastic Surgery, The Affiliated Children's Hospital of Nanjing Medical University, Nanjing 210008, China
陈华
010050 内蒙古自治区呼和浩特市 内蒙古医科大学附属医院医疗美容整形烧伤科
Department of Plastic Surgery and Burns, The Affiliated Hospital of Inner Mongolia Medical University, Hohhot 010050, China
林力,谢叻,梅琼风
200030 上海市 上海交通大学
Shanghai Jiao Tong University, Shanghai 200030, China
鲍劲松,杨芸
201600 上海市 东华大学
Donghua University, Shanghai 201600, China
孙丽萍,张培茗,白宝丹
200120 上海市 上海健康医学院医疗器械学院
The College of Medical Instrument, Shanghai University of Medicine & Health Sciences, Shanghai 200120, China
卓越
201318 上海市 上海市医疗器械检验研究院
Shanghai Medical Device Testing Center, Shanghai 201318, China
何超
201210 上海市 上海微创医疗器械(集团)有限公司
Shanghai MicroPort Medical Technology Co. Ltd, Shanghai 201210, China
石运永
226400 江苏省南通市 南通罗伯特医疗科技有限公司
Nantong Robert Medical Technology Co. Ltd, Nantong 226400, China
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
汽车实用技术(2022年15期)2022-08-19
现代仪器与医疗(2022年2期)2022-08-11
航空学报(2022年5期)2022-07-04
现代仪器与医疗(2022年1期)2022-04-19
现代仪器与医疗(2022年1期)2022-04-19
现代仪器与医疗(2021年2期)2021-07-21
模具制造(2019年10期)2020-01-06
科学导报·科学工程与电力(2019年5期)2019-10-20