
换道工况下乘员舒适性的影响因素研究*
2021-05-10 06:41朱国章黄洪荣
佳木斯大学学报(自然科学版) 2021年2期
朱国章, 黄洪荣, 王 珊
(1.上海大众汽车有限公司,上海 201805;2. 同济大学汽车学院,上海 201804)
0 引 言
乘员舒适性评价涉及人机工程学、心理学、生理学等多方面因素[1]。结合不同学者对舒适性的定义和表述,舒适性是人在与环境发生交互时的愉悦状态,取决于内外部影响因素的共同作用,包括生理和心理因素,其评价是主观的[2-3]。
NVH、热舒适性等是传统汽车舒适性的研究范畴,对于自动驾驶汽车,乘坐舒适性表现出新特征。自动驾驶模式下,车辆行驶依靠系统的环境感知、决策规划、以及运动控制,其行驶表现的优劣不再取决于驾驶员自身的驾驶水平,而完全取决于自动驾驶系统的性能。在驾驶权丧失的情况下,自动驾驶系统控制的不同车辆行驶行为会影响乘员的安全感和信任度,进而引发心理、生理不舒适问题。常见情况表现为,强烈的横纵向加速度变化会刺激人体的前庭器官造成眩晕、过小的障碍物间距会造成乘员心理紧张等[4]。
从影响机理分析,人体对于舒适状态的认知基于多通道信息输入,通过整合来自不同感官通道的信息,乘员能够更准确地感知外部环境并做出合理反应[5]。据此,目前研究多从引发人体平衡觉感受的车辆运动状态和视觉感受的环境交通状况入手对乘员舒适性问题加以分析。平衡觉感受方面,国内外学者从速度、加速度及其变化率、行车间距等车辆运动学参数出发开展了一系列理论和试验研究。Schrauf等人[6]开展了不同交通场景下的实车对比试验,证实加速度及其变化率、操纵灵敏度、行车间距等运动学参数的改变会引起乘员体感舒适性的变化。Bellem等人[7]发现对于加减速工况,受试者期望车辆以尽可能小的加速度及加速度变化率行驶。此外,蒙昊蓝等人[4]设计并开展了换道工况下的自动驾驶汽车行驶行为对比试验,证实了侧向加速度对于体感舒适性的影响。视觉感受方面,解业达[8]通过分析受试者对于不同标准道路的路况评级和期望车速,证实了路面标线、道路整体色调、不良弯坡道路组合及护栏等因素属于道路状况评价突出要素,能够决定乘员对自动驾驶汽车行驶行为预期。Bellem等人[7]认为自动驾驶汽车乘员对于紧急状况与潜在危险的感知将决定行驶行为偏好:针对被迫换道行为,乘员在安全距离标识的提示下偏好迅速且激进的换道行为。 综上所述,以上研究分别探讨了平衡觉和视觉因素对舒适性的影响,但并未进行不同刺激强度对于舒适性影响规律的研究,且未深入探讨两种刺激输入对乘员舒适性的耦合作用。基于此,本文选定典型换道工况,设计并开展不同程度的平衡觉和视觉刺激的双因素3×3混合试验,3级平衡觉刺激体现为由换道侧向加速度峰值为衡量指标的慢、中、快换道,3级视觉刺激由设置不同视觉危险度的障碍物(无障碍、锥桶、假车)实现,研究两类影响因素在耦合作用下对乘坐舒适性的影响。
1 试验设计
1.1 试验场景和流程设计
试验在封闭测试区一条笔直的双向四车道上进行,模拟换道工况(如图1所示)。右侧车道近端设置有障碍物,受试者乘坐自动驾驶测试车辆,从右侧车道由静止加速至60km/h后匀速直线行驶接近障碍物,在障碍物前方由同一位置向左换道避让障碍物,完成换道后逐渐减速直至车速为零。

图1 试验工况设置图
试验设置3条换道轨迹对应慢、中、快换道以侧向加速度峰值为平衡觉输入控制变量设计不同的换道轨迹,记amax1为向左避让阶段的侧向加速度峰值,amax2为向右回正阶段的侧向加速度峰值;试验的平衡觉输入工况设置如表 1所示。

表1 试验平衡觉输入工况设置
此外,试验选取障碍物视觉刺激强度作为视觉输入控制变量。一般来说,体积越大、质量越重的障碍物给人的视觉危险感越强,因此分别通过强障碍(放置靶车)、弱障碍(放置水马)、无障碍(不放置障碍物)实现3级视觉输入刺激,设置如图 2所示。

图2 障碍物设置情况实景图
综上,试验分别改变平衡觉、视觉刺激强度,构建3×3阶共9种试验工况,模拟自动驾驶汽车面对三级视觉输入强度障碍物下的三类具备不同平衡觉感受的换道行为。试验招募了5位受试者,其中男性1位,女性4位,年龄分布在21岁至24岁之间(平均值M=22.6岁,标准差SD=0.89),全部持有驾照。试验过程中,每位受试者将经历全部9次行驶过程,在每级障碍物下依次经历慢换道、中换道、快换道三种行驶工况,试验流程如图 3所示。

图3 试验流程示意图
1.2 主观评价
试验主观评价分为测前问卷、测中问卷、测后访谈三部分。设计测前问卷,从乘车经历、乘车习惯、驾驶风格、驾驶水平等角度收集受试者的个人统计学基本信息;设计测中问卷获取受试者对于每级障碍物类型下的三种换道行驶行为的主观偏好;设计测后访谈问卷获取受试者对于9种行驶工况舒适性的总体评价和反馈。测前及测中问卷以选项形式收集答案,访谈项问题通过记录受试者主观反馈作为结果。
2 试验结果
2.1 数据分析方法
由于本试验样本量较小,采用t检验中的配对检验方法,验证不同工况下主观评价结果差异的统计学意义。t检验通过运用t分布理论来推断差异发生的概率,从而比较两个样本平均数的差异是否显著[9],计算公式如公式1所示。
(1)
2.2 试验结果假设
本文假设,当上述两类因素处于耦合状态时,视觉输入强度将决定乘员对生理和心理舒适性的诉求,进而影响乘员对于行驶行为的主观接受度及偏好。随着环境障碍物危险程度增加,视觉输入对于乘员舒适性的影响能力上升,使心理舒适性对于乘员舒适性的主导作用增强,而生理舒适性的主导作用降低。环境障碍物的视觉危险程度越高,乘员避免发生碰撞的意愿越强烈,即越倾向于通过牺牲生理舒适性以换取心理舒适性的提升;反之,环境障碍物的视觉危险程度越低,平衡觉感受对于乘员舒适性的影响作用越强,乘员越倾向于追求生理舒适性的提升。由此,在强障碍情况下,预计乘员将偏好平衡觉输入最高而视觉输入最低的快换道工况;在弱障碍情况下,预计乘员将偏好平衡觉和视觉输入均为中等的中换道工况;在无障碍情况下,预计乘员将偏好平衡觉输入最低的慢换道工况。
2.3 主观问卷结果
受试者实际主观偏好结果如表 2所示:强障碍和弱障碍情况下,5位受试者均偏好中换道工况;无障碍情况下,3位受试者偏好慢换道工况,2位受试者偏好中换道工况。主观评价的统计学结果如表 3所示:强障碍与弱障碍情况下的主观偏好不存在统计学差异;强障碍与无障碍情况下的主观偏好以及弱障碍与无障碍情况下的主观偏好均存在显著差异,具有统计学意义(P<0.1)。

表2 主观偏好结果
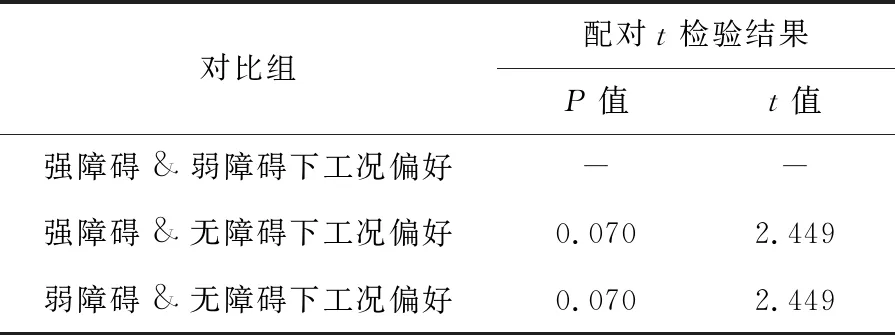
表3 主观偏好假设检验结果
2.4 主观评价结果可靠性验证
前序研究中,蒙昊蓝等通过实车试验证实皮肤电水平变化幅值与乘员不舒适状态呈正相关,是有效表征不舒适程度的客观生理指标[4]。本文在试验全程采集并记录了受试者皮肤电水平信号,从客观生理信号的角度验证主观评价结果的可靠性。皮肤电水平在试验过程中的变化趋势如图4所示,车辆启动前受试者皮肤电水平趋于较低的稳定状态(对应静息值),试验开始后受试者经历换道过程,皮肤电水平升高至峰值后下降,最后恢复为稳定状态。试验选取信号变化幅值Δh,即峰值与静息值的差值作为客观生理信号分析指标。

图4 换道试验中皮肤电水平变化趋势图
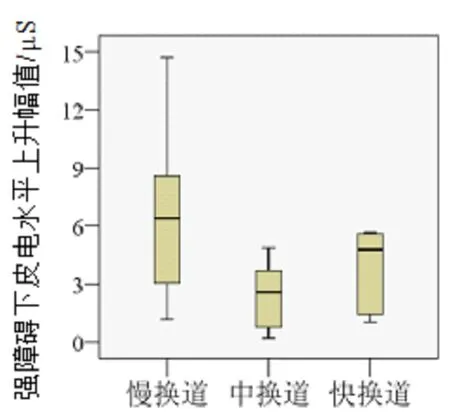
图5 强障碍下所有受试者皮肤电水平上升幅值
如图5所示,以强障碍场景为例,分析不同换道行为的主观评价结果和皮肤电水平变化。强障碍下所有受试者均偏好中换道工况,而皮电水平在中换道工况(2.429±1.960)中的上升幅值也均小于慢换道(6.789±5.284)和快换道(3.709±2.289)。中换道工况的皮肤电水平上升幅值最低的现象与主观评价中受试者偏向中换道的结果表现出一致性,证实了试验主观评价结果具有可靠性。
3 分析与讨论
试验得到的主观评价结果与预期结果的对比如图 6所示:强障碍情况下,100%的受试者偏好中换道工况,与试验预期不符;弱障碍情况下,100%的受试者偏好中换道工况,与预期相符;无障碍情况下,40%的受试者偏好中换道,另有60%的受试者偏好慢换道,总体上与预期部分相符。

图6 换道试验主观结果与预期对比图
结合试验设置和访谈记录分析,快换道不符合试验预期结果的原因可能是由于该工况的平衡觉输入过大。试验结束后的访谈中部分受试者反映快换道工况下的侧向加速度过大,导致体感不舒适程度过高。结合试验设置可知,快换道工况回正阶段的侧向加速度峰值显著高于其余两种工况;
弱障碍情况下,全部受试者均偏好中换道工况,与预期完全相符。可见当引发换道的障碍物危险程度较低时,较小的视觉刺激不足以让乘员产生牺牲体感舒适性而追求心理舒适性的倾向,此时乘员期望车辆的行驶行为既不存在碰撞风险,同时具备较小的平衡觉输入。
在无障碍情况下,多数受试者偏好慢换道工况,符合试验预期,仅有1号和4号受试者的偏好与预期不符,可证实当自动驾驶汽车进行非环境交通引发的自由换道时,由于不存在视觉输入与平衡觉感受耦合,乘员舒适性将完全表现为生理舒适性,此时平衡觉因素成为舒适性的主导影响因素。偏好与预期不符的2位受试者均偏好中换道工况,结合试验设置和访谈记录分析可能原因,包括:(a)由于试验条件限制,慢、中换道两工况下平衡觉的实际输入区分度不足,两类行驶行为的体感易引发混淆;(b)受试者驾驶偏好和信任度差异:两名受试者在手动驾驶场景中均偏好以大转角尽早汇入的换道方式,激进的驾驶风格可能是其选择中换道工况的潜在原因;此外,4号受试者对于自动驾驶系统信任程度较低,同样可能造成选择视觉碰撞风险更低的中换道工况。
综合分析无障碍和弱障碍下的主观偏好变化规律可知:随着环境视觉输入增加,受试者的行驶行为偏好由平衡觉输入最低的慢换道转变为平衡觉输入增加而视觉输入降低的中换道,在一定程度上证实当环境交通的视觉危险程度上升时,视觉因素对于乘员舒适性的影响程度将增大,而平衡觉因素对于乘员舒适性的影响程度将减小,乘员展现出牺牲一定程度的生理(体感)舒适性以换取心理(视觉)舒适性的倾向。此外,有受试者提出在强障碍下因慢换道工况下的安全距离过小而选择中换道,可进一步佐证当环境交通的视觉危险程度较高时,心理舒适性的表现作用将增强。
4 结 语
本文在换道工况下探讨了不同环境下车辆不同换道行为对乘员舒适性的影响,得到结论如下:
1)乘员舒适性受平衡觉刺激(体感舒适性)和视觉刺激(心理舒适性)的共同影响;
2)随着外界环境视觉危险程度的增加,乘员舒适性的主要影响因素从平衡觉刺激向视觉刺激转变。具体而言,乘员倾向于牺牲一定程度的生理舒适性以换取心理舒适性,期望车辆采取尽早感知并规避风险的行驶策略。
后续研究中,可进一步做优化的方面包括:1)细化试验设置中平衡觉和视觉输入的颗粒度,构建多级工况,深入研究两类影响因素分别逐级增大/减小的过程对于舒适性的影响规律;2)优化车辆运动学参数和障碍物设置,避免过大或过小的平衡觉输入,提升环境障碍物的视觉区分度等。
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
现代仪器与医疗(2021年2期)2021-07-21
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
建筑热能通风空调(2018年5期)2018-07-09
汽车电器(2018年1期)2018-06-05
消费者报道(2016年3期)2016-02-28
汽车文摘(2015年11期)2015-12-02
汽车零部件(2014年6期)2014-09-20
