车辆转向机构优化虚拟实验设计
2021-05-09 21:05崔玉鑫李风杨彬杨洋王超飞
中国教育技术装备 2021年6期
崔玉鑫 李风 杨彬 杨洋 王超飞








摘 要 针对机械优化设计实践教学过程中计算机编程实验偏多、实物实验少的问题,提出根据典型机械优化问题——车辆转向四连杆机构的优化设计,设计一套适合高校教学使用的优化实验台,并结合虚拟实验,将车辆转向机构的详细结构以及其在车辆中的布置情况进行充分展示,从而弥补由于实验台设计的简化而带来的失真,提升实验质量。
关键词 车辆转向机构;四连杆;虚拟实验;实验台;阿克曼转向几何;虚拟实验室
中图分类号:G642.0 文献标识码:B
文章编号:1671-489X(2021)06-0112-04
Virtual Experimental Design of Vehicle Steering Mechanism Optimization//CUI Yuxin, LI Feng, YANG Bin, YANG Yang, WANG Chaofei
Abstract Aiming at the problems in the practical teaching process of mechanical optimization design which is too much computer pro-gramming experiments but almost no physical experiments, an experimental equipment suitable for college teaching is designed accor-ding to the typical mechanical optimization problem the optimal design of four-link for vehicle steering, and the virtual experiment is built to improve the experimental effect. Using virtual reality tech-nology, the detailed structure of vehicle steering mechanism and its arrangement in the vehicle are fully displayed, so as to compensate for the unreal caused by the simplification during the design of the experimental equipment.
Key words vehicle steering mechanism; four-link; virtual experiment; experiment plateform; Ackermann steering geometry; vir-tual laboratory
0 前言
目前,在機械优化设计领域教学过程中,大多采用理论教学与计算机编程实验相结合的方式,实物实验台较为少见[1]。由于没有达到实物直观的实践教学水平,使得学生将理论应用于实际工程问题的能力不足。
车辆转向四连杆优化实验台是以实际工程问题为背景进行研发设计的。车辆转向机构[2-3]是经典的机械机构,转向四连杆的优化也是经典的最优化问题,以这样经典的机械优化问题作为实验题目,使学生既能体会优化设计在机械设计中的重要作用,又能了解最优化方法处理问题的典型流程和常用工具。
1 实验台总体结构与实验原理
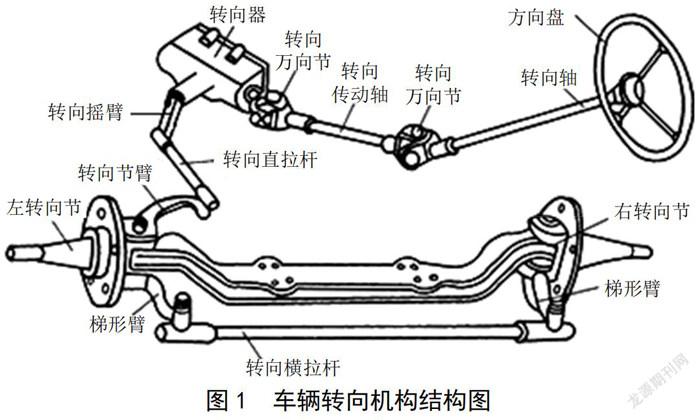
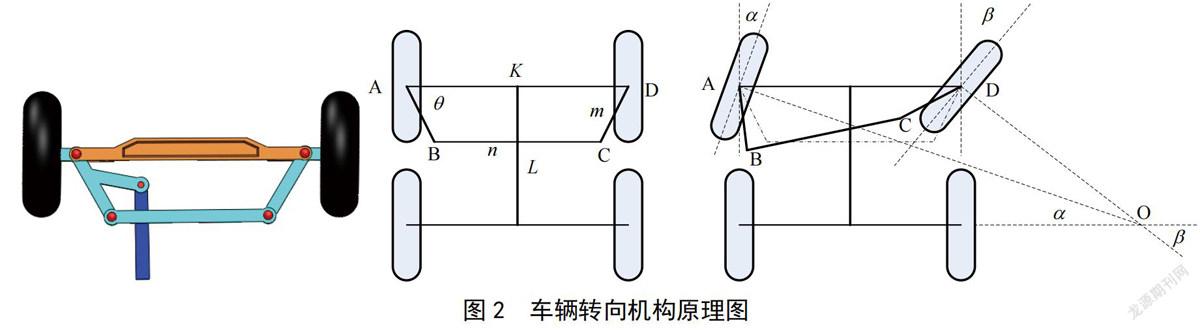
车辆转向系统概述 如图1所示,机械式车辆转向机构的功能是根据车辆方向盘的输入角度,使两侧转向轮偏转,从而实现车辆转向。为了使车轮相对地面的侧向滑动尽可能小,从而减少轮胎的磨损,转弯时各个车轮应做同一圆心不同半径的圆周运动,如图2所示。这种运动使得两侧转向轮的转角不同,且满足一定的关系,这种几何关系被称为阿克曼(Ackermann)转向几何。
如图2所示,设外侧车轮转角为α(或αE),内侧车轮转角为β,AD长为K,前后车轮轴长(轴距)为L,则阿克曼转向几何的两侧车轮转角的关系为:
为了满足阿克曼转向几何关系,大多数车辆的转向机构采用转向四连杆机构(等腰梯形)。转向四连杆并不能完全实现阿克曼转向几何关系,但通过合理地设置转向四连杆的边长,可使两侧车轮的转角关系近似为阿克曼转向几何关系,这就需要利用最优化方法来设计最优边长。
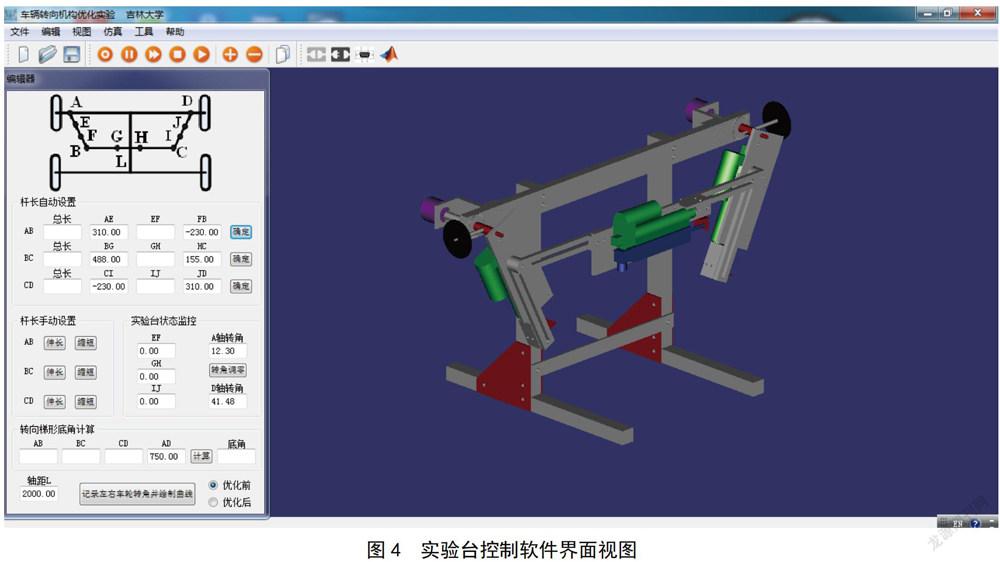
实验台结构和功能 车辆转向四连杆优化实验台的结构如图3所示,由优化机构、控制器和控制计算机三部分组成。优化机构的作用是模仿图1所示的真实车辆转向机构,使其转向梯形的横拉杆、梯形臂的长度可以在一定范围内自由设置,以便找到最优的转向四连杆结构;控制器的作用是根据控制计算机发出的杆长设置命令控制优化机构实现相应的杆长设置,以及将优化机构的状态信息返回给控制计算机;控制计算机的作用是利用软件实现优化问题的求解,并将优化结果发送给控制器实现相应的杆长设置,同时显示优化机构的当前状态。
控制软件界面如图4所示,在“编辑器”工具条中,在“杆长自动设置”栏中,在各杆相应的“总长”输入框中输入欲设置的长度,点击后面的“确定”按钮,优化机构会通过电动推杆自动设置各杆相应的长度。
实验原理 在实验过程中,学生首先建立优化问题数学模型。
设计变量(梯形臂长、梯形底角):
上下限约束(根据实验台结构尺寸确定):
目标函数:
其中,αi为转向梯形中外轮转角α在内轮转角β=i*t处的值;αEi为阿克曼转向几何中外轮转角α在内轮转角β=i*t处的值;将β(0,βmax)分成n等分,每一份的大小为t(约为1°)。
α=∠DAC+∠CAB-θ
根据以上数学模型编写MATLAB软件程序进行求解,将求得结果通过控制计算机的实验台控制软件传输给优化机构。由此,优化机构的杆长变为最优的杆长。此时,学生用手转动梯形臂使转向机构进行转向,左右轮的转角通过编码器采集后传回控制计算机,获得优化后的转角关系曲线。学生也可以通过控制软件任意设置优化机构的杆长,获得任意结构下的转角关系曲线。将优化后的转角关系曲线和任意结构下的转角关系曲线进行对比,如图5所示,学生即可直观看出最优化方法在实际工程问题中的作用。
2 虚拟实验
由于车辆转向四连杆优化实验台对真实的车辆转向机构进行了简化抽象处理,使得学生很难将实验台结构与真实转向机构对应。为此,借助“国家级虚拟仿真实验教学中心——机械虚拟仿真实验教学中心”的建设机会,本实验台设计了虚拟实验,如图6所示。
首先,在虚拟实验室中建立一个独立的车辆转向机构简化模型,学生可以用鼠标控制其中的方向盘转动,两侧车轮也会随之转动,从而初步体验该机构。其次,在虚拟实验室中建立一个整车模型,该模型中除了转向机构外,其余各部件都采用半透明显示,使学生了解真实的车辆转向机构的详细结构以及其在车辆中的布置情况。最后,在虚拟实验室中建立虚拟的车辆转向四连杆优化实验台,该实验台的操作流程与实物实验台一致,使学生可以随时随地进行车辆转向四连杆的优化实验。
3 结语
针对目前国内高等教育对机械优化設计实践教学过程中计算机编程实验偏多、实物实验少的问题,本文提出根据典型机械优化问题——车辆转向四连杆的优化设计,设计一套适合高校教学使用的优化实验台。该实验台既能反映工程优化问题的实质,又不过于复杂,以免学生难以完成。本文分析了实验原理、实验步骤以及相应的解算程序的编制,建立虚拟实验环境,增强实验效果。上述实验改革措施,经笔者三年多的实践,效果令人满意。
参考文献
[1]桂兴春,薛宇薛,勇颜玉,等.“一带一路”背景下地方综合性高校培养创新创业人才机械优化设计课程教学实践[J].中外企业家,2017(4):207-208.
[2]王海涛,陈哲明.汽车转向机构仿真及优化设计[J].计算机仿真,2013(3):162-165,200.
[3]崔玉鑫.机械系统动力学[M].北京:科学出版社,2017:1-100.
*项目来源:2015年度吉林大学本科教学改革研究项目“现代设计技术课程建设与实践教学改革”;2017年度吉林大学本科教学改革研究项目(2017QNYB044;2017XYB015;2017XZD012;2017XYB281)。
作者:崔玉鑫,吉林大学机械科学与工程学院,讲师,研究方向为机械系统动力学、现代设计技术;李风,吉林大学机械科学与工程学院,副教授,研究方向为机械系统动力学、现代设计技术;杨彬,吉林大学机械科学与工程学院,高级工程师,研究方向为机械系统动力学、现代设计技术;杨洋,吉林大学机械科学与工程学院,工程师,研究方向为机械系统动力学、现代设计技术;王超飞,通信作者,吉林大学生物与农业工程学院,讲师,研究方向为测试与传感技术(130022)。
猜你喜欢
装备制造技术(2021年1期)2021-05-21
湖北文理学院学报(2017年2期)2017-04-16
都市家教·下半月(2016年11期)2016-12-29
电脑知识与技术(2016年26期)2016-11-24
艺术科技(2016年9期)2016-11-18
科技视界(2016年23期)2016-11-04
科教导刊·电子版(2016年22期)2016-11-02
工业设计(2016年11期)2016-04-16
科技视界(2016年8期)2016-04-05
河南科技(2014年4期)2014-02-27