
基于模型的环境修正匹配滤波算法
2021-05-08 02:57惠娟喻淇健唐开宇赵安邦郎俊杰王大宇
哈尔滨工程大学学报 2021年3期
惠娟, 喻淇健, 唐开宇, 赵安邦,4,5, 郎俊杰, 王大宇
(1.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨 150001; 2.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001; 3.海洋信息获取与安全工业和信息化部重点实验室(哈尔滨工程大学),黑龙江 哈尔滨 150001; 4.西藏大学 工学院,西藏 拉萨 850000; 5.中国船舶工业系统工程研究院 水声对抗技术重点实验室,北京 100036; 6.中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
随着声呐及其相关技术的不断发展,人们对声呐系统的要求不再局限于发现目标,而是向雷达的要求靠拢,即需要在发现目标的同时,获取目标的位置、姿态以及类型,并保证其准确性和实时性[1]。随着信号处理技术的不断发展,各种各样的信号检测方法层出不穷,并被广泛应用于通信、雷达、声呐等领域,但匹配滤波器仍然是在工程实践中最受青睐的信号检测器,它被用来在带限白噪声背景干扰下(理想条件下)检测确知信号,是基于输出信噪比最大准则下的“最佳”线性滤波器[2]。
匹配滤波器(matched filter,MF)技术一直是雷达信号检测领域的研究重点[3],早在20世纪40年代初期,雷达领域中的匹配滤波理论和线性调频脉冲压缩原理已经被提出[4]。而后经过十余年左右的发展,对于此方面的理论与技术研究才逐步得以完善。Stewart等[5-6]首次将匹配滤波检测理论应用于声呐技术的研究,经过对主动声呐中一些理论概念进行区别分析,得出结论:应用在雷达中的匹配滤波器技术并不能直接用于声呐系统中。对于复杂的海洋环境来说,声呐系统的设计远不像雷达那样简单,需要考虑信号衰减、目标变化等诸多因素[7]。在匹配滤波的实际应用中,直接对多途信道中的接收信号进行匹配滤波,接收信号与参考信号的互相关在发射信号的中心频率附近振荡。这导致多维匹配滤波器输出的非全局最大值不止一个。为了解决由海洋环境因素引起的多径影响,Hermand首次实现了一种基于模型的匹配滤波器[8],此设计所涉及的算法修正了参考信号,进而补偿了失真,由此改善经典匹配滤波器的检测性能。
主动声呐发射信号经过浅海多途信道传播后,回波信号与参考信号相关性降低,进而导致匹配滤波器检测性能下降的问题。本文以匹配滤波理论为基础,针对水下慢速运动目标,从减小由海洋环境引起的多径效应对目标探测的影响的角度出发,重点研究环境修正匹配滤波算法(environmental correction matched filter,ECMF)。
1 基于模型的环境修正匹配滤波器
设已知的发射信号用s(t)表示,环境引起的信道冲激响应用g(t)表示,则接收信号r(t)由发射信号s(t)和信道冲激响应的卷积获得,假设接收到的信号被一个加性的、零均值的平稳高斯噪声n(t)扰动,得到匹配滤波器的输入信号x(t),上述过程可表示为:
x(t)=r(t)+n(t)=s(t)*g(t)+n(t)
(1)
回波信号模型示意图,如图1所示。

图1 信号模型示意Fig.1 Signal model diagram
基于模型的ECMF的主要思想是从改进匹配滤波器参考信号的角度出发所给出的。首先,通过主动声呐信号回波估计出信道冲激响应函数,然后利用估计所得信道冲激响应与发射信号的拷贝相卷积来进行信道修正,将二者的卷积结果作为ECMF的新的参考信号对接收信号进行匹配滤波处理,得到ECMF的输出波形。基于模型的ECMF原理框图如图2所示。
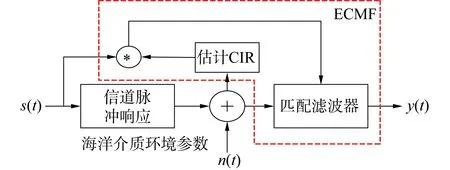
图2 基于模型的ECMF原理Fig.2 Block diagram based on ECMF model


(2)
则匹配滤波器的传输函数可表示为:
H(ω)=K·S*(ω)G*(ω)·e-jωt0
(3)
进一步,匹配滤波器的频域输出可表示为:
Y(ω)=X(ω)H(ω)=KS(ω)G(ω)S*(ω)×
G(ω)e-jωt0+KN(ω)S*(ω)G(ω)e-jωt0
(4)
式中:等号右边第1项记为YS(ω)为目标信号经匹配滤波器的输出,第2项记为YN(ω)为噪声经匹配滤波器的输出。为了更清晰地分析更新后的参考信号对目标信号的影响,本文省略噪声项,对信号项进行进一步推导。对信号项进行傅里叶逆变换得:
ys(t)=K·s(t)*s(t0-t)*g(t)*g(-t)
(5)

(6)
式中:Ai=K·Kgi为一非零常数。因此由式(6)可以得出,在ti=t0时获得最大值,基于模型二的ECMF在理论可以减弱环境对信号的影响,实现对信号回波的准确检测[9]。
2 信道冲激响应估计
由凸优化将接收信号最小均方误差的目标函数转化成二阶锥的形式,可以解决收敛性和参数选择问题,同时,确保了全局最优解,以此获得较准确的求解结果[10],下面将对二阶锥规划(second-order cone programming,SOCP)原理进行阐述。
对于一个向量空间V与它的一个子集C,如果子集C中的任意一点x与任意正数a,其乘积ax仍然属于子集C,则称C为一个锥。锥具有这样的性质:锥中每个成员的第1个元素大于等于剩余元素的欧几里得范数。式(7)给出锥的定义:
Cq:={x=(x1,x2,…,xn)∈IRn:x1≥
‖(x1,…,xn)‖}
(7)
任何凸二次约束条件可以表示为一个二阶锥和一个或多个超平面的组合。二阶锥规划问题常用下式进行表述:
minfTx
(8)
(9)
(10)
式中:SOCαi为复空间的二阶锥。
根据仿射变换的性质,变换后凹凸性不变,因此二阶锥仍然是一个凸锥。
将所求问题转化为二阶锥规划的形式是利用二阶锥求解信道冲激响应函数的重点和难点。若将约束函数转化为式(10)的形式,就可以将其转化为SOCP问题,进而利用内点工具进行求解。具体推导过程如下。

(11)

(12)
式中:H为待求的单位信道冲激响应向量,长度为M;Y=[y1y2…yN]T是实际的接收信号,长度为N;yk是Y的第k个元素;ek是第k个求解的预测输出信号与实际接收信号数据的误差;Xk是输入信号矩阵X中的第k行;X是由输入信号X=[x1x2…xN]T构成的矩阵,表达式如下:
(13)
引入一非负变量ζk(k=1,2,…,N),则式(12)可以表示为:
(14)
将式中的约束条件|yk-XkH|2≤ζk进行变换:
|2yk-2XkH|2≤4ζk⟺
(15)
由最后推导结果可进一步构造为:
(16)
1+[qT(k)01×M]γ,k=1,2,…,N
“反预期”资源在美方报道中的占比也远高于中方,美方往往在否定某个观点的同时提出自认为正确的观点,中方则通常为了强调自己的立场而使用“反预期”资源,例如:
(17)

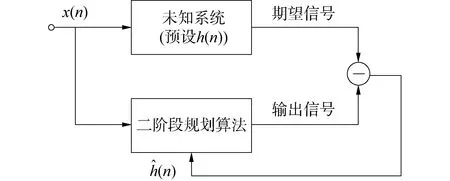
图3 基于二阶锥规划的信道估计原理Fig.3 Principle block diagram of channel estimation based on second-order cone programming
图3中x(n)表示主动声呐的发射信号。与常用的最小二乘法相比,二阶段锥规划法不需要对参数进行设置,同时能够避免收敛速度慢等问题。
3 仿真分析
3.1 基于模型的环境修正匹配滤波器仿真分析
通过Bellhop软件进行仿真,给出预设的浅海多途信道模型。在Bellhop仿真软件中设置仿真环境为海深50 m,设置水听器与目标的水平距离为600 m,声源、水听器和目标都位于水下47 m处。得到仿真结果如图4。
仿真参数设置:发射信号为LFM信号,中心频率为10 kHz,带宽为10 kHz,脉宽为40 ms,信噪比为-3 dB。预设信道冲激响应第1个冲激在0.813 3 s处,由于匹配滤波器为后延输出,则理论上目标的第1个回波应出现在0.853 3 s处。结果如图5。
图5(d)中的MF,图5 (e)中基于模型的ECMF在0.853 3 s处出现了第1个信号峰值。对比三者检测结果,可以看出基于模型的ECMF检测结果可以看到,与MF对比,其对噪声有一定的抑制能力,并通过加强参考信号与回波信号中目标信号的相关性,改善经典匹配滤波器受多径效应影响而使得性能下降的问题。

图4 预设浅海多途信道Fig.4 Preset shallow sea multipath channel
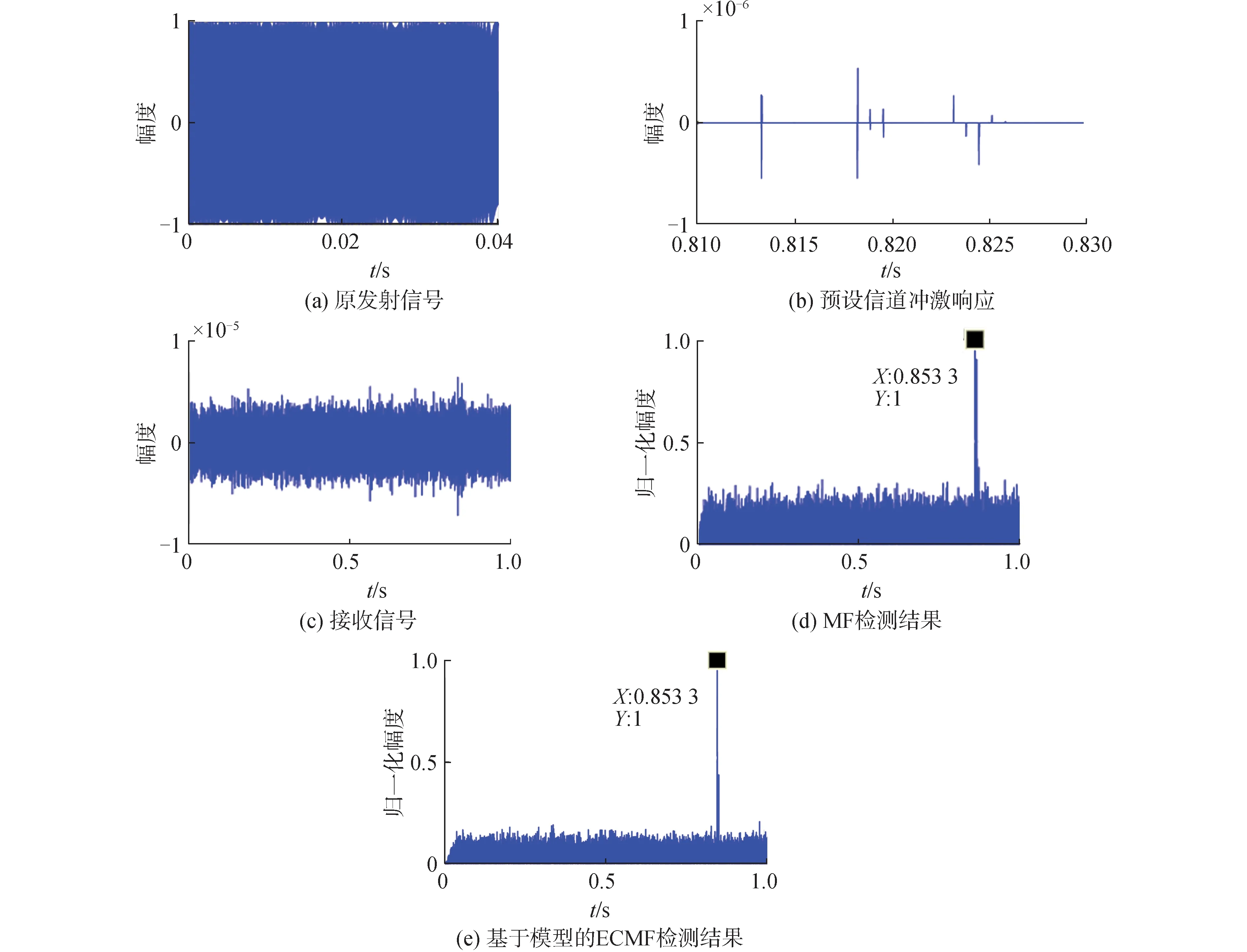
图5 不同算法的检测结果对比Fig.5 Comparison of detection results of different algorithms
进一步给出信噪比为-5、-10 dB下2种方法的检测结果,将检测结果放大,观察信道修正效果,如图6、7所示。
3.2 信道冲激响应估计仿真分析
仿真参数设置:发射信号为LFM信号,中心频率为10 kHz,带宽为10 kHz,脉宽为40 ms。

图6 信道已经知时检测结果(-5 dB)Fig.6 Detection results without channel estimation (-5 dB)

图7 信道已知时检测结果(-10 dB)Fig.7 Detection results without channel estimation (-10 dB)
图8分别表示二阶锥规划法在5、0、-5、-10 dB下的信道冲激响应估计结果。随着信噪比的降低,信道冲激响应估计性能下降,逐渐引起失真。在-10 dB信噪比下,仍能相对较为准确的给出信道冲激响应的估计值。但精确求解的同时,也带来了耗时过长的问题。

图8 不同信噪比下二阶锥规化法信道估计结果Fig.8 Channel estimation results of second-order cone programming method under different signal-to-noise ratios
3.3 MF和ECMF的仿真对比
仿真1:MF和ECMF的检测结果对比。
仿真参数设置:发射信号为中心频率为10 kHz,带宽为10 kHz,脉宽为40 ms的LFM信号。选择二阶锥规划法进行环境修正。给出信噪比为-5 dB和-10 dB下MF和ECMF的检测结果如图9、10。

图9 经过信道估计后检测结果(-5 dB)Fig.9 Detection results with channel estimation (-5 dB)

图10 经过信道估计后检测结果(-10 dB)Fig.10 Detection results with channel estimation(-10 dB)
对比图9和图10在-5、-10 dB信噪比下经过MF和ECMF对目标信号的检测结果。子图(a)表示未经环境修正的MF输出,子图(b)表示经过环境修正后的ECMF输出。通过对比可以看到,MF的检测结果中,目标信号周围存在着由多途信道引起的其他相关峰,使得目标信号的分辨能力下降。而在ECMF算法的检测结果中,虽然不能完全去除相关峰的影响,但是可以对其进行削弱,此外,与MF相比,ECMF具有一定的噪声抑制能力。因此,对比二者的检测结果可知,当MF算法受多径效应影响,而使得其检测性能下降的时,ECMF算法可以对环境影响做出修正,来提升在此条件下MF算法的检测性能。
仿真2:MF和ECMF的ROC曲线对比。
仿真参数设置:发射信号为中心频率10 kHz,带宽为10 kHz,脉宽为4 ms的LFM信号,信噪比为-9 dB,蒙特卡洛次数为500次。结果如图11。
从图11中可以看到,低虚警概率时ECMF的检测概率要高于MF。再次证明了当发射信号受多途径信道影响到达接收端,MF对回波信号的检测能力下降时,ECMF可以通过对环境影响进行修正,来改善MF的检测性能。需要说明的是,MF仍是高斯白噪声背景下,输出信噪比最高的最佳处理器。这里ECMF处理性能的提升,是在多径效应影响下,对MF检测能力下降问题做出的改善。

图11 MF和ECMF算法的ROC曲线Fig.11 ROC curves of MF and ECMF
4 环境修正匹配滤波器实验数据处理
试验地点位于浙江省建德市的新安江水电站库区实验站,本次试验在固定平台上展开。在本次试验过程中,将发射传感器、接收水听器阵列以及目标均布放于水下47 m处,在此深度的声速是1 457 m/s。发射信号为56~65 kHz的线性调频信号,信号脉宽为5 ms,信号发射周期为1 s(如图12)。试验数据处理结果如图13、14。
从图13中可以看到,与图13(a)的经典匹配滤波算法检测结果相比,图13(b)的ECMF算法对噪声有一定程度的抑制作用,此时,目标强度要相对高于强干扰。为了方便观察ECMF的修正效果,将检测结果放大进行局部观察,得到图14,通过对比图14(a)和(b)可以看到,MF的输出结果中目标周围存在其他相关峰,不利于对信号的检测,而在ECMF的检测结果中,目标周围的相关峰得到了削弱,提高了对目标信号检测的准确性。

图12 发射信号波形Fig.12 Transmit signal waveform

图13 检测结果Fig.13 Detection results

图14 检测结果放大Fig.14 Magnified detection results
5 结论
1)本文提出基于模型的环境修正匹配滤波算法。算法可以有效地改善由于浅海多途信道传播后,回波信号与参考信号相关性降低,进而导致匹配滤波器检测性能下降的问题。
2)通过仿真验证了环境修正匹配滤波器可以对在多径效应影响下,传统匹配滤波检测算法检测性能下降的问题做出改善,提升算法的检测性能。
3)试验数据处理结果表明基于模型的环境修正匹配滤波算法可在去除目标周围相关峰的同时,对噪声进行一定程度的抑制,改善了经典匹配滤波器因环境影响而使得其处理性能下降的问题,并在一定程度上提高了处理增益。
猜你喜欢
中等数学(2021年9期)2021-11-22
火控雷达技术(2021年2期)2021-07-21
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年3期)2017-11-23
中学数学杂志(初中版)(2016年3期)2016-06-24
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
火控雷达技术(2016年2期)2016-02-06
