
车辆加速工况驾驶性评价
2021-05-08 04:07:08李玉珍叶春林毛万鑫
中国新技术新产品 2021年4期
李玉珍 叶春林 毛万鑫
(1.上汽通用五菱汽车有限公司,广西 柳州 545007;2.武汉理工大学机电工程学院,湖北 武汉 430070)
0 引言
随着社会经济的发展与进步,家用汽车的数量逐渐增多,用户的驾驶水平也有所提升。用户对轻型汽车驾驶性的需求也在不断地提高,对动力性、舒适性以及NVH等性能的要求更加严格,这就对车企整车开发的技术提出了更高的要求。汽车的驾驶性是在汽车纵向行驶过程中人车交互的综合感知,包括汽车的静态性能和动态响应能力。汽车的驾驶性可以体现车型的定位和品牌的能力,是影响产品市场竞争力的重要因素。在满足安全性和经济性的前提下,舒适性和人性化必将成为未来轻型汽车性能开发的主要方向[1]。
1 驾驶性评价方法
可以从不同角度、使用不同方法对汽车的驾驶性能进行评价。目前常用的方法主要有主观评价和客观评价。由于驾驶性的构成较为复杂,包括汽车在不同方向上的动态响应,因此主观评价可以从汽车驾驶的多个维度进行评价;客观评价能对汽车的驾驶性进行量化,通过分析可以将汽车驾驶性与车辆性能的参数结合在一起,从而指导开发性能参数。主客观评价汽车驾驶性针对的是汽车不同状态下的性能。客观评价主要对车辆的稳态性能进行评估;而主观评价主要是对车辆的瞬态品质进行评估[2]。
1.1 主观评价
主观评价是指驾驶员在驾驶时可以通过五官和身体的内部感觉对车辆的动态响应做出主观评价。国外企业使用AUDIT评价法、SAE主观评车标准以及日本的五分制打分等。国内驾驶性评价起步较晚,但近几年,国内企业和研究机构都开展了对驾驶性主观评价的相关研究,例如中国汽车研究中心2017年发布了EV-TEST主观评价管理规则,其评分方法见表1。

表1 EV-TEST评分方法
国外相关学者使用不同方法对汽车的驾驶性进行综合评价,例如驾驶性指标体系构建、多元线性回归虚拟评价、神经网络虚拟评价以及仿真分析与测试评价方法等。国内也在开展相关研究,并逐步形成了基于模糊理论、动态规划等算法的驾驶性评价方法。
1.2 客观评价
客观评价是指在特定工况下通过一系列传感器对车辆进行测试,采集车辆的控制参数和状态参数,分析所得的结果并建立汽车相关性能与参数之间的联系。在汽车的行驶过程中,加速度和速度对人类感觉与知觉的影响最为突出,不同方向上加速度的大小表征了车辆的不同性能。在行驶方向(X向)上,速度和加速度的大小表征汽车的动力性;横向(Y向)的速度与加速度的大小表征汽车转向的稳定性;纵向(Z向)的速度与加速度的大小表征汽车的乘坐舒适性。客观评价可以通过汽车客观表征出来的指标参数定量地分析驾驶品质存在差异的内在原因,为车型开发及优化提供指导性建议。
国外已经发表了关于驾驶性研究的成果,英国巴斯大学的Pickering,S.G致力于驾驶性主客观评价一致性的研究[3]。利用多元线性回归理论对相同工况的主观评价指标与客观参数进行回归分析,得到客观参数与主观评分之间的多元线性回归方程,建立了通过客观参数对主观驾驶性进行预测的回归模型。奥地利公司AVL推出驾驶性客观评价与标定的工具AVL-Drive,通过三向加速度传感器测量车辆的运动状态,并使用遗传算法和神经网络算法综合评价汽车的驾驶性。
国内驾驶性评价起步较晚,同济大学的章桐、刘普辉构建了汽车驾驶性的评价准则及指标,分析稳态加速、急踩加速踏板2项工况中各项客观表征的指标,可以对车辆的驾驶性进行客观地评价[4]。2015年王勐将基于AVL-Drive的AMT驾驶性评价应用到陕汽某牵引车上,对测试结果进行评估分析,得出车辆在性能方面存在不足,并对其进行了优化[5]。
2 加速工况指标确定
对车辆行驶的行为进行拆分,通常可以分为起步、加速、突然踩油门、突然松油门、松油门滑行、换挡、巡航、怠速、油门响应、启动、关机以及震动共13种工况。不同的驾驶工况对车辆驾驶品质的影响也有所不同,因此需要研究能反映对应工况的驾驶性评价指标。加速工况是指驾驶员操作加速踏板使其开度变大的过程,加速可以提升车辆的速度。车辆加速工况的驾驶性表现在响应是否迅速、加速过程是否平顺2个方面。由对加速工况的定义可知,加速过程中的主要操作对象是油门踏板,根据操作踏板的不同方式,可以将加速工况分为2种情况进行评价,即全油门加速工况与部分油门加速工况。以下分别对2种加速工况的评价指标进行分析。
2.1 全油门加速
全油门加速工况是指在加速过程中油门踏板处于满载位置。全油门加速工况主要考察车辆在满载时的动力性能,可以进一步分为爬坡能力、最高车速、净加速能力以及动力储备能力等方面的性能评价指标[6]。
2.1.1 爬坡能力
汽车的爬坡能力是指汽车满载时,在良好路面上用一挡行驶所能克服的最大坡度。通常用最大爬坡度表示,如公式(1)所示。

式中:imax为汽车的最大爬坡度,%;αmax为汽车所能越过的最大坡度,°。
如果要求汽车有足够的爬坡能力,那么载货汽车30%,越野汽车imax的值大约为在60%。汽车最大爬坡度的测试方法如下:选择与该车预计爬坡度相近的坡道,坡道长度应大于25 m,坡前应有8 m~10 m的平直路段[7]。测试车停在坡底靠近坡道的平直路段上,变速器放置在最大牵引力的输出挡(通常是一挡)。汽车起步后,将加速踏板踩到底进行爬坡,如果汽车能顺利爬上该坡道,就选择更大一级坡道进行测试,直到汽车不能爬上坡道为止,测试中汽车能爬上的最大坡度,就是汽车的最大爬坡度。
2.1.2 最高车速
需要考察全油门加速工况下车辆能达到的最高车速,它反映了车辆的动力性能。影响汽车最高车速的因素比较多,例如汽车发动机的功率、发动机的最大转矩、最大转矩时的转速、传动系的传动比以及行驶阻力等。因为最高车速是在平坦无风路面上、加速度为0时求得的,因此坡度阻力和加速阻力为0;所以影响最高车速的阻力因素主要是空气阻力和滚动阻力。
2.1.3 净加速能力
净加速能力主要考察的是在不考虑道路状况、驾驶行为等因素时,车辆加速到一定车速的综合性能,要求车辆能快速响应、平顺地达到理想车速。评价净加速能力的指标有加速时间、95%峰值加速度等。具体指标及描述见表2。

表2 净加速能力指标
2.1.4 动力储备能力
动力储备能力又可以称为超车能力,主要考虑了车辆在直线行驶中超车时的综合性能。与净加速能力不同,考察动力储备能力的加速时间要求车辆到达一定初速度才开始全油门操作,这是为了模拟现实中的真实超车场景。动力储备能力的具体指标及描述见表3。

表3 动力储备能力指标
2.2 部分油门加速
日常驾驶中绝大多数加速行为都不是全油门加速,而是部分油门加速。因此,需要着重考察部分油门下的车辆驾驶品质。部分油门加速工况主要用来评估车辆在部分油门操作下动态性能的表现,其主要指标包括峰值加速度、加速度增益、加速度扰动以及线性相关度等。试验的具体做法是通过在油门踏板上安装限位器,测定试验车在不同油门深度下的各项特性指标。
2.2.1 加速度增益
加速度增益是指加速度值与油门开度的比值,反映了单位油门开度下加速度值的大小,是加速工况下的1项重要评价指标,它可以作为加速度峰值及加速时间等宏观指标的补充。
2.2.2 线性相关性
线性相关性是指扭矩与油门踏板开度的比值,反映了车辆在加速时的平顺性。
2.2.3 加速度扰动
由于发动机的不稳定区域被利用,因此传动系扭转或者弯曲振动等会造成发动机和被驱动的车轮之间动力传递的不均匀性,有可能会出现振动,该振动通过方向盘或者车身传递过来,使人能够感到轰鸣或者抖动。加速度扰动情况可以用加权加速度四次均方根值来表示,又称为振动剂量值(surge)。其计算方法,如公式(2)所示。

式中:acci为车辆加速度值;i为样本数据点序号;n为样本总数量。
3 驾驶性试验
驾驶性客观评价是通过车辆状态参数来评价车辆的性能,其基础是汽车在行驶过程中实际响应的客观物理量,因此驾驶性客观评价依赖于实车测试。
3.1 试验车辆及工况
试验车辆是采用某车企SUV车型,车辆状态及性能良好,车辆各项参数见表4。
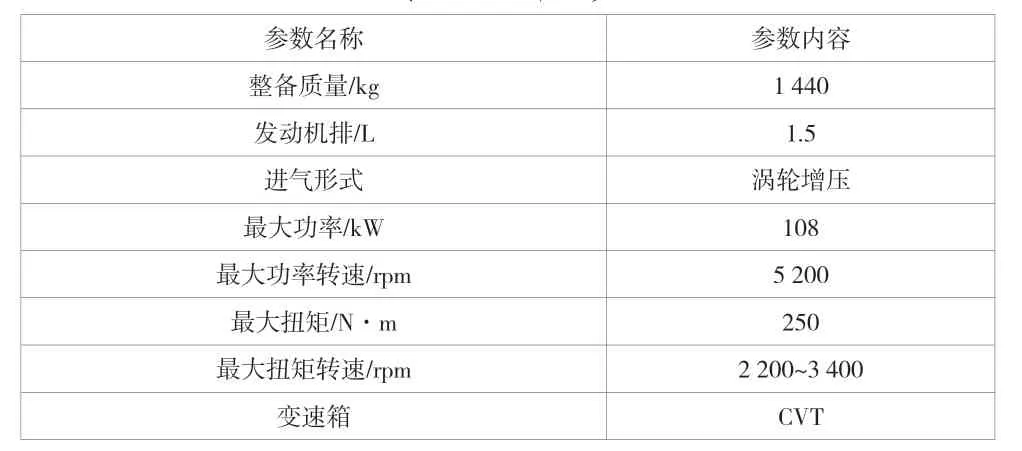
表4 试验车辆参数
试验工况选择汽车场景中最为常见的“加速”工况,对汽车加速行驶过程的相关参数进行测试,根据参数分析并客观评价车辆的驾驶性,例如车辆加速的动力性、平顺性等。试验车辆如图1所示。

图1 试验所用车辆
3.2 试验设备
试验采用AVL-Drive数据采集仪,并配套使用AVL-Drive数据采集软件对车辆参数进行测试。车辆中安装数据采集仪及其相关配套传感器,并通过AVL-Drive软件进行测试,如图2所示。

图2 试验设备安装
试验设备的具体信息见表5。加速度信号由加速度传感器对其进行采集,传感器包括2个单轴加速度传感器(分别装于驾驶位座椅头枕处和悬挂下摆臂处)和1个三轴加速度传感器(装于副驾驶座椅滑轨末端),其中采样频率为100 Hz。其他信号例如引擎转速、车速等信号通过CAN总线连接进行读取。
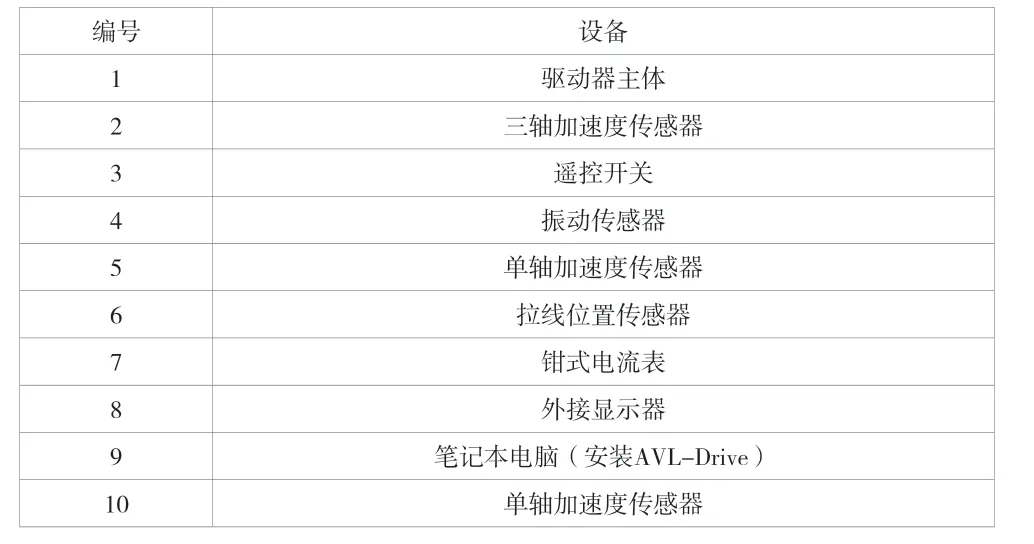
表5 试验设备
试验场地选择某主机厂封闭试验场地,保障试验的安全性。对加速工况进行试验并截取车辆从静止到加速过程中的速度、加速度、油门开度以及时间点等重要参数,处理并分析车辆的加速性能。
4 专业化评价体系平台搭建
基于Matlab GUI平台并结合驾驶性评价体系,开发了驾驶性试验数据后处理软件平台,对试验数据进行计算,可以得到各驾驶性评价指标的值。针对该文研究的加速工况,搭建了驾驶性评价平台,如图3所示。

图3 加速工况软件平台界面
对试验车辆加速工况的驾驶性指标进行计算,通过与对标车进行对比,从而为优化车辆的驾驶性能提供指导意见。试验车与对标车的主要参数对比见表6。

表6 试验车与对标车主要参数对比
图4为试验车和对标车在不同油门开度下的速度对比。由图4知,在5%~35%油门开度加速中,试验车的加速能力优于对标车,而对标车在小油门加速中较柔和、平顺。

图4 固定油门工况速度曲线对比
图5为试验车和对标车的全油门加速度对比。在全油门加速中,试验车出现峰值加速度的时间早于对标车,对标车峰值加速度的持续时间比试验车的持续时间长。峰值加速度区间的持续时间越长就越能增强车辆的加速性能,因此全油门加速中,对标车的加速性能优于试验车。

图5 全油门加速工况加速度对比
根据软件平台计算的指标,针对全油门加速工况中存在的转速波动进行优化,优化后的转速曲线在最大值、最大值持续时间及曲线平滑度上明显优于优化前。优化对比结果如图6所示。

图6 优化前后对比
5 结论
通过分析车辆加速工况的特点以及对驾驶品质的要求,并结合相关标准建立了车辆加速工况的驾驶性评价体系,确定了峰值加速度、加速时间、加速度增益以及加速度扰动等评价指标。
试验采用AVL-Drive数据采集仪,并配套使用AVL-Drive数据采集软件对试验车与对标车进行了加速工况驾驶性的试验,对车辆的加速度、油门、发动机、变速箱以及车速等信号数据进行采集。
基于Matlab GUI平台并结合驾驶性评价体系,开发了驾驶性试验数据后处理软件平台,计算得到各驾驶性评价指标的值。并根据驾驶性指标的对比,针对试验车全油门加速工况中存在的转速波动,对试验车进行优化,优化后转速曲线在最大值、最大值持续时间及曲线平滑度上明显优于优化前。
猜你喜欢
专用汽车(2023年6期)2023-06-25 07:43:27
河南科技(2023年7期)2023-05-30 20:24:08
岷峨诗稿(2020年4期)2020-11-18 23:54:01
中国资源综合利用(2017年1期)2018-01-22 02:44:24
重庆交通大学学报(自然科学版)(2017年12期)2017-12-28 08:16:52
中国资源综合利用(2016年4期)2016-01-22 08:27:32
中国资源综合利用(2016年12期)2016-01-22 02:02:23
中国资源综合利用(2016年12期)2016-01-22 02:02:20
中国科技纵横(2014年20期)2014-12-11 08:10:44
发明与创新·小学生(2013年8期)2013-04-29 00:44:03
