多功能包装一体机的研究与测试
2021-05-07 02:24:26张学良彭宽栋庄敏
现代信息科技 2021年23期
关键词:智能控制系统
张学良 彭宽栋 庄敏

摘 要:针对目前市场上小型多功能包装设备紧缺的现状,开发了一种集“旋盖—封口—开箱—装箱—折箱—封箱”等功能于一体的包装机。提出了一种由自动封口、自动开箱、自动装箱、自动折箱和自动封箱等机构组成的结构设计方案,利用三維建模软件建立了该包装一体机的数字化模型。在分析各机构运动关系的基础上,开发了基于PLC与WinCC Flexible的智能控制系统及智能操作系统。最后对工程样机进行测试,结果表明:所设计的包装一体机操作简便、运行稳定,达到总体设计要求。
关键词:多功能包装一体机;智能控制系统;工程样机
中图分类号:TP315 文献标识码:A文章编号:2096-4706(2021)23-0154-05
Research and Test of Multifunctional Integrated Packaging Machine
ZHANG Xueliang1,2, PENG Kuandong1,2, ZHUANG Min1,2
(1.Institute of High-end Equipment, Hangzhou Polytechnic, Hangzhou 311402, China; 2.Hangzhou Polytechnic, Hangzhou 311402, China)
Abstract: In view of the shortage situation of small multifunctional packaging equipments in the market, a packaging machine integrating the functions of “capping-sealing-unpacking-packing-folding-sealing” is developed, and a structural design scheme composed of automatic sealing, automatic unpacking, automatic packing, automatic folding and automatic sealing is put forward, the digital model of the integrated packaging machine is established by using the three-dimensional modeling software. Based on the analysis of the motion relationship of each mechanism, an intelligent control system and intelligent operating system based on PLC and WinCC Flexible are developed. Finally, the engineering prototype is tested, and the results show that the designed integrated packaging machine has the advantages of simple operation, stable operation, and meets the overall design requirements.
Keywords: multifunctional integrated packaging machine; intelligent control system; engineering prototype
0 引 言
目前市场上使用的大部分国内研发的包装包装一体机功能相对单一,大部分只能实现3个左右的包装工序,对多工位多功能包装一体机的自主研发能力相对薄弱,愿意投入精力研发的科研院校和企业也不多,本文围绕装箱一体化工艺流程进行分析,深入研究设计能实现装箱一体化的多功能包装一体机,提出了自动封口机构、自动开箱机构、自动装箱机构、自动折箱机构和自动封箱机构等机构组成的多功能包装一体机本体结构设计方案,同时在分析各机构运动关系及各包装工序逻辑关系的基础上,开发了基于PLC+Wincc Flexible开发包装一体机的智能控制系统及智能操作系统。
1 包装一体机本体结构设计
在设计机械本体时,运用了大量四杆机构及衍生机构,基于NX软件将进瓶、封口、开箱、装箱、折箱和封箱等功能集成后绘制了三维机械装置模型,在对大量仿真运行数据完善后完成了机械本体结构设计,本体各部分机械装置均模块化设计,方便功能拓展,解决市场上的包装机械功能单一,不易于功能拓展的问题。
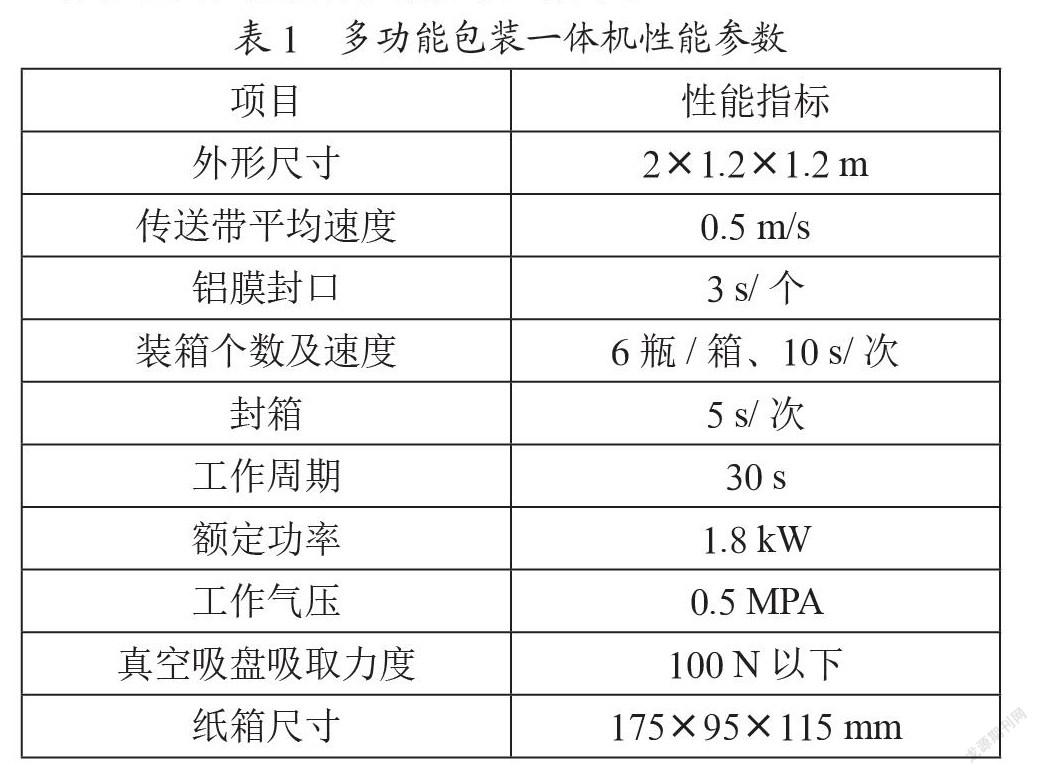
基于市场上相关包装机械功能分析,研制的多功能包装一体机应能代替需要人力完成的自动封口—装箱—折箱盖—封箱等工序,操作简便、稳定性高、设计人性化。在分析市场上小型包装机械功能指标并优化后提出的小型多功能包装一体机相关性能设计参数如表1所示。
其主要功能有:
(1)自动封口功能:当旋盖后的瓶子依次经过热封装置时,实现需要密封保存类商品的密封功能。
(2)自动开箱功能:自动将纸板展开成立体形状的纸箱。
(3)自动装箱功能:密封后的瓶子在机械手的作用下准确装进展开的纸箱。
(4)自动折箱功能:装好瓶子的纸箱在传送带作用下进入折盖装置,快速折好纸箱的上下盖子。
(5)自动封箱功能:折盖后的纸箱在输送装置作用下,经过封箱装置,箱体上下盖子会迅速被胶带封好。
(6)自动分瓶、分箱功能:为保证瓶子、纸箱在传送带上有序运行,通过控制气缸动作工序时间、输送带进瓶工序时间、实现自动分瓶、分箱,以保证瓶子和纸箱在传送带上有序运行。
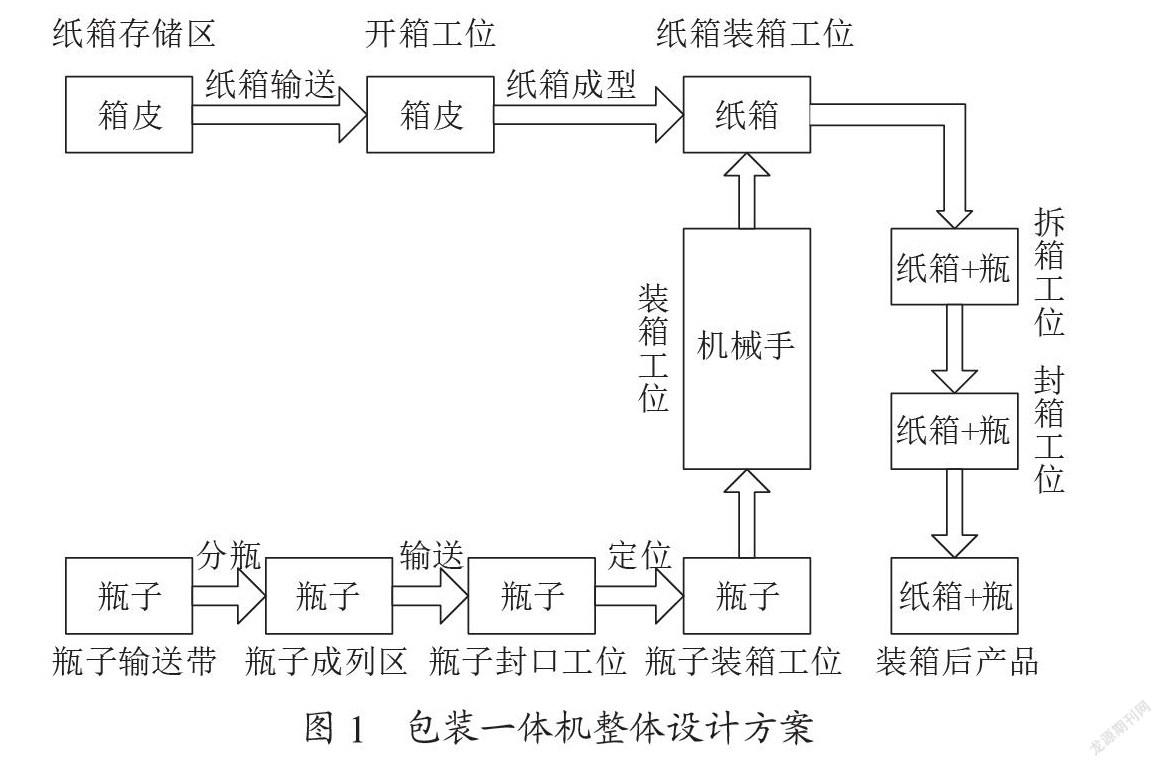
包装机的工作循环可以分为三过程:瓶子运行过程、纸箱运行过程、裝箱运行过程,其中瓶子运行过程与纸箱运行过程通过装箱运行过程连接,整体设计方案如图1所示。
基于以上分析,运用NX8.0设计了包装包装一体机的整体机械本体模型,如图2所示,主要由热封装置、二自由度气动吸盘、四杆衍生机构、五杆机构等组成。
2 包装一体机控制系统设计
2.1 包装一体机控制系统概述
在对多功能包装一体机的控制功能需求进行详细分析的基础上,确定将多功能包装一体机控制系统划分为七个子系统,分别为:供瓶子系统、定位导向子系统、封口子系统、开箱子系统、装箱子系统、折箱子系统、封箱子系统。供瓶子系统:该子系统将需装箱的瓶子,通过输送装置送入封口子系统;封口子系统:该子系统是将旋盖后的瓶子依次经过封口工位,采用非接触式热封装置可快速实现密封功能;定位导向子系统:该子系统将封口子系统中的瓶子定位好,以便于包装一体机能顺利地抓取瓶子,同时为装箱导向,防止包装一体机装箱过程中发生故障;开箱子系统:用来完成纸箱开箱成型动作,以便于装箱子系统完成装箱任务;装箱子系统:该子系统是将定位好的瓶子装入已经成型好的纸箱中去,以便于封箱子系统完成封箱任务;折箱子系统:该子系统是将装箱后的箱盖折平,便于下一工位进行封箱动作;封箱子系统:该子系统是将装箱完成的纸箱用胶带密封,完成整个装箱流程。理配置触摸屏和上位机,完成控制系统的电路设计,主要包括系统供电电路设计、安全控制电路设计、伺服系统电路设计、电机驱动电路设计等组成。
2.2 控制系统硬件分析
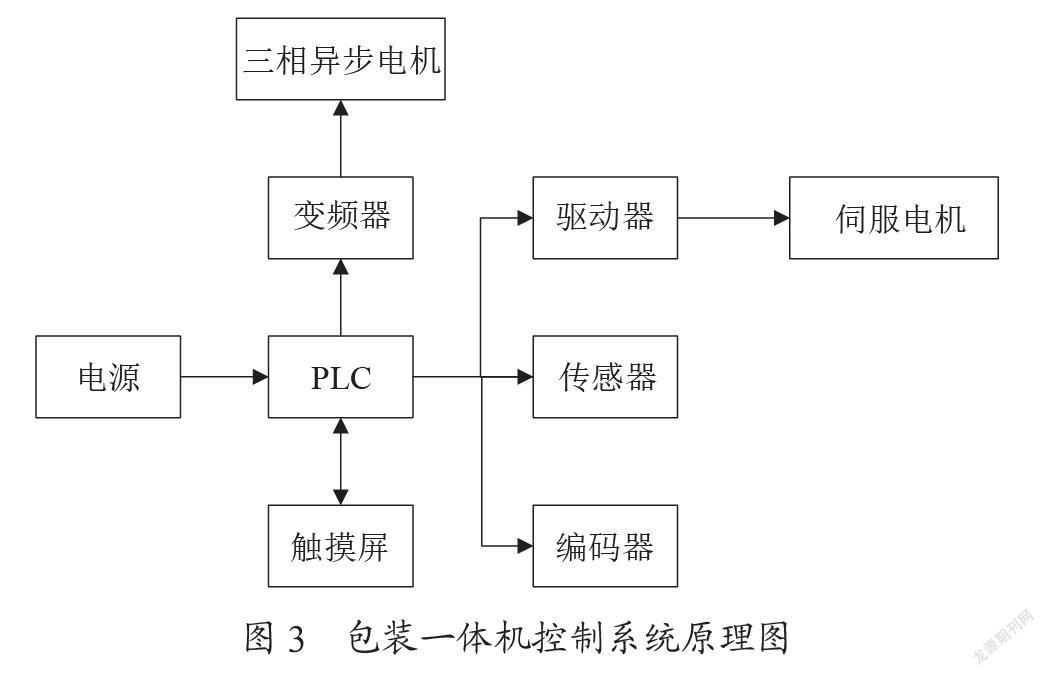
多功能包装一体机的控制系统是基于西门子S7-200为主控,采用变频驱动系统来实现运动控制,由EM232模块来进行数字量/模拟量转换对VFD-M系列台达变频器0~10 V电压改变进行信号传送从而实现电机加速减速功能。在整个系统中主要靠光电传感器利用开关量信号接收以及磁性开关的信号接收,PLC的I/0口根据这些检测得到的信号进行计算从而控制电机驱动板来控制电机停止及加减速功能。光电开关接收到封口位信号,高频发生器进行动作,将瓶口的铝膜封起来。当送料传送带底部检测到瓶子满时,左右无杆气缸动作,将瓶子送到送箱传送带中,在送箱传送带上,当箱子折完前端盖时,光电开关检测到信号,折盖气缸动作,之后通过封箱机构从而完成一系列动作。整个控制系统的控制原理如图3所示。
2.3 控制系统软件设计
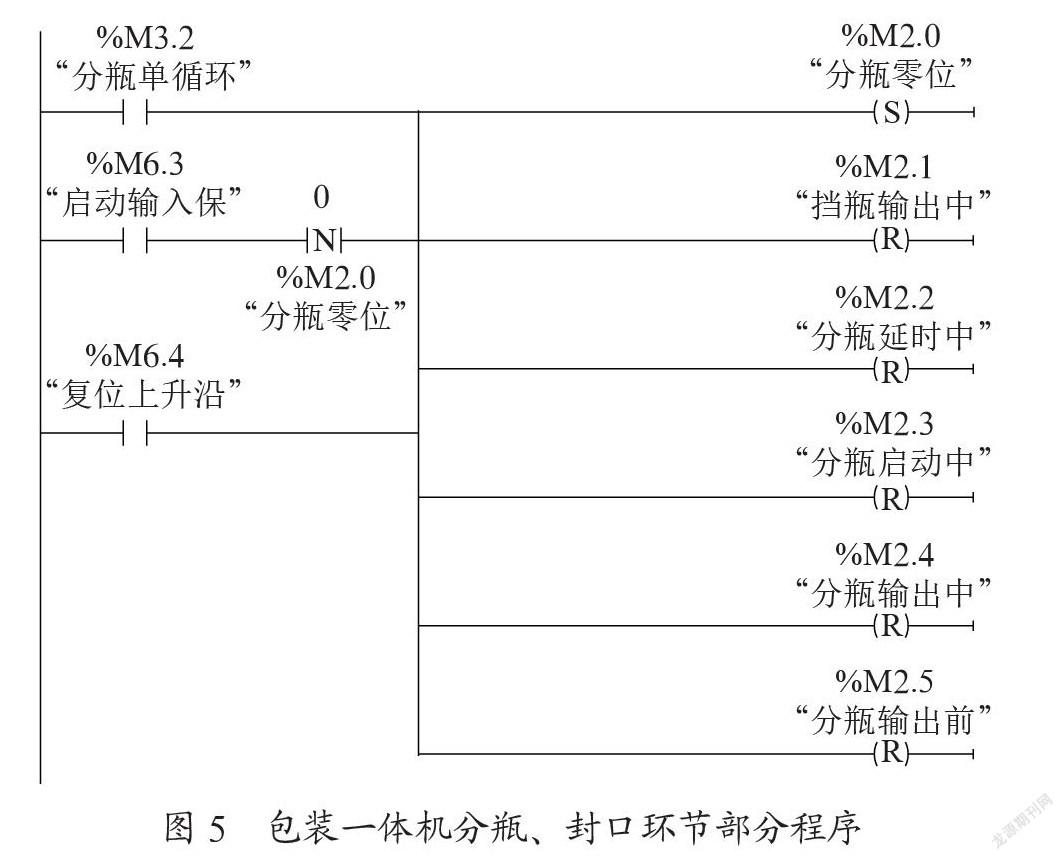
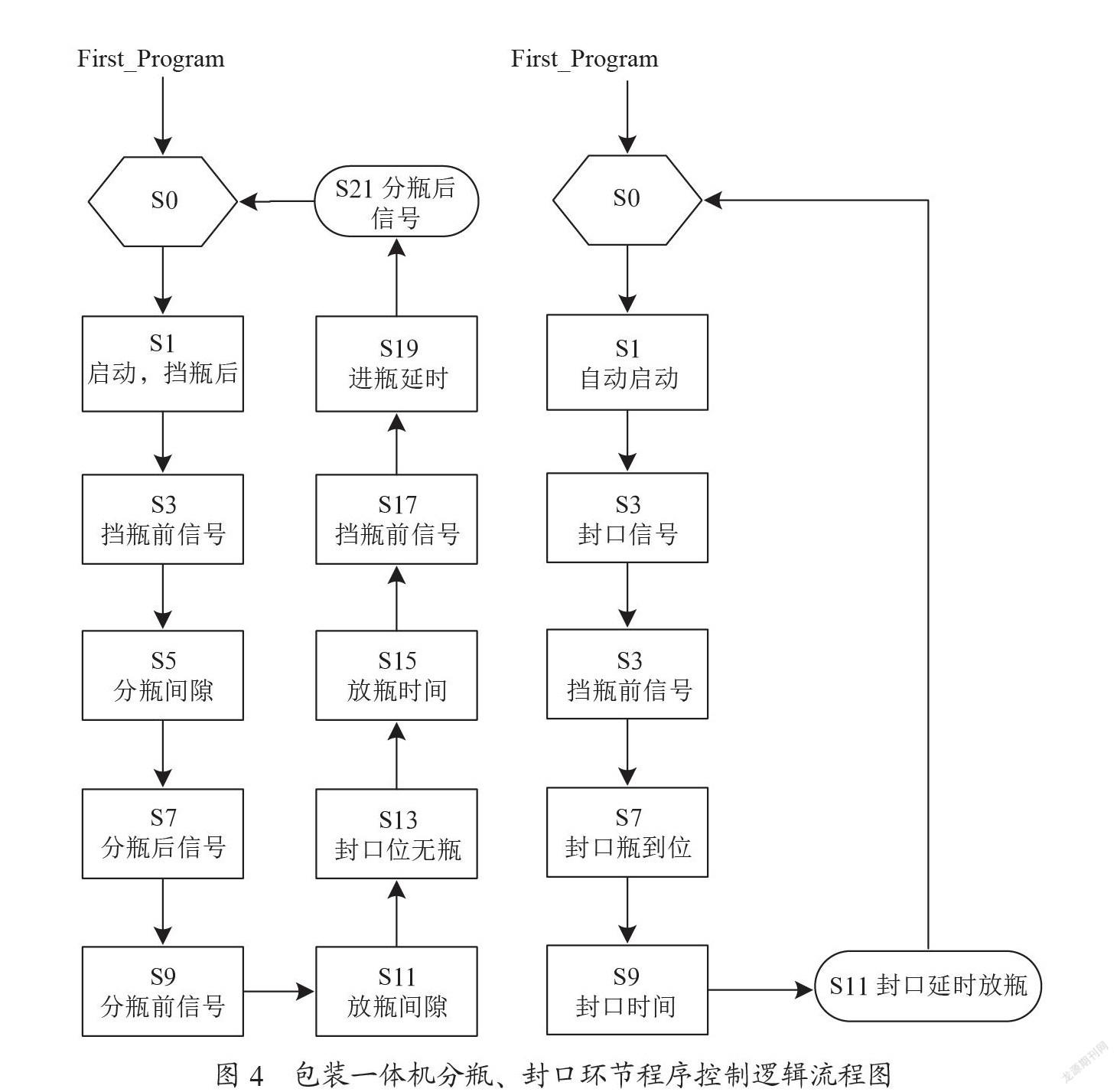
包装一体机分瓶、封口环节程序控制逻辑流程如图4所示,当光电传感器检测到瓶子后,传送带停止运行,磁性开光启动,分瓶气缸挡住后面的瓶子,铝膜封口装置开始加热,延时3秒之后挡瓶气缸收回,铝膜封口装置停止加热,传送带启动,再延时10秒之后挡瓶气缸伸出,进行下一个瓶子的封口,部分程序图如图5所示。
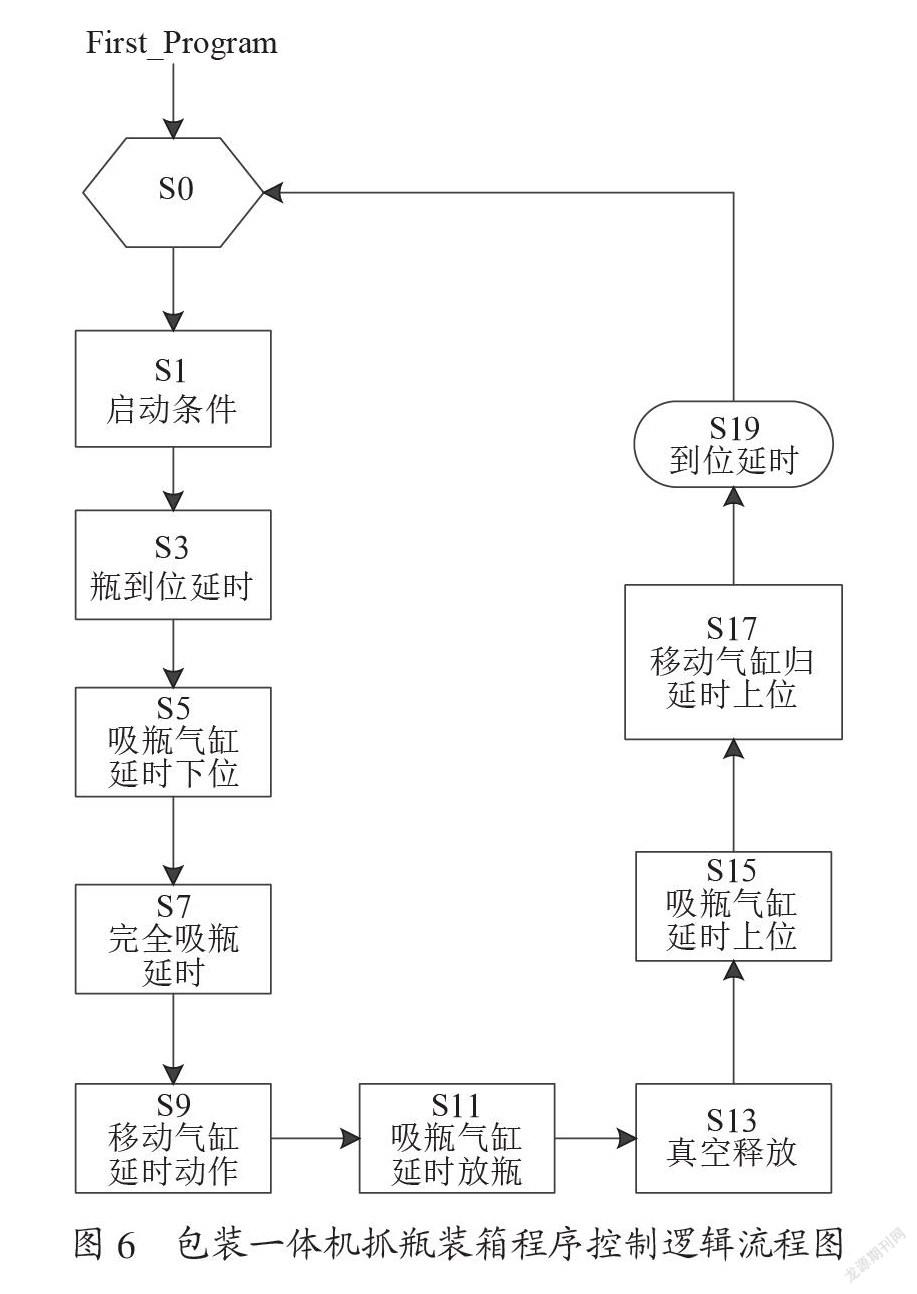
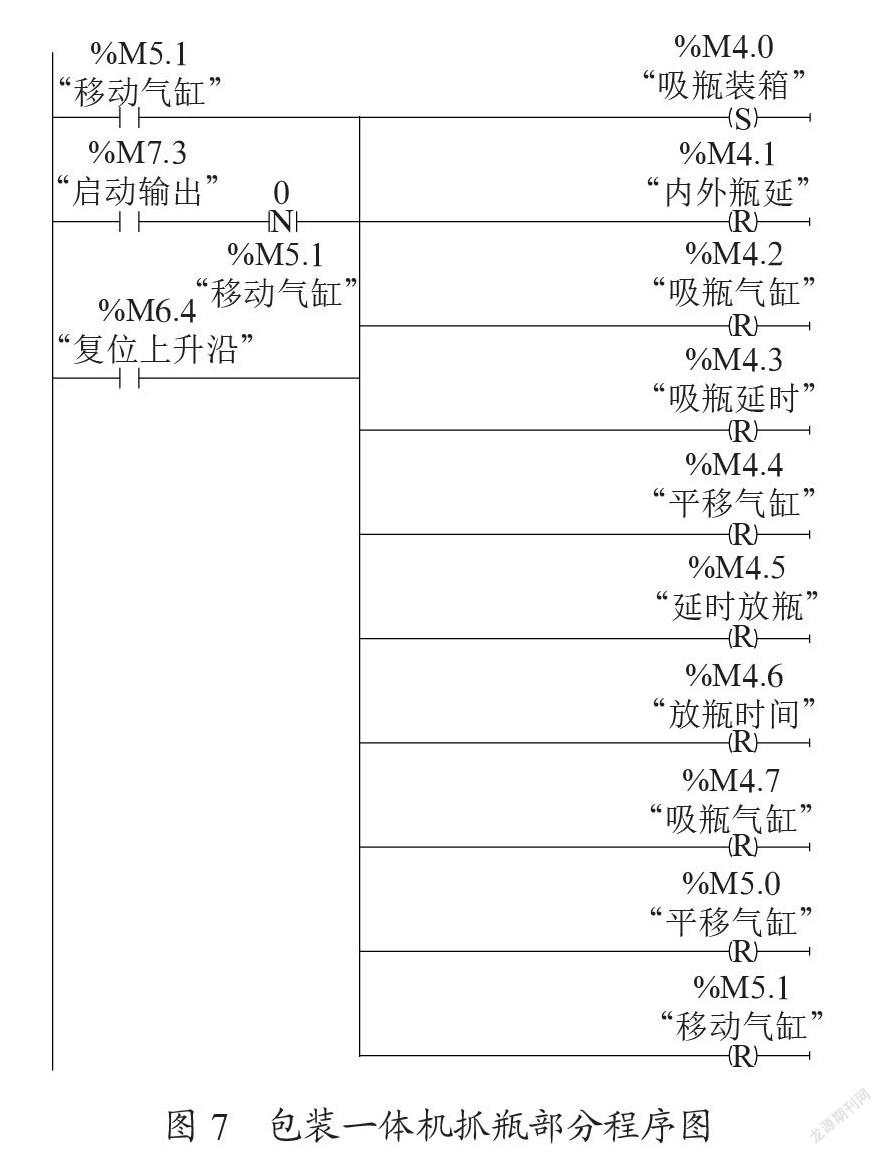
包装一体机抓瓶装箱程序控制逻辑流程如图6所示,当光电传感器感应到瓶子达一定数量后,传送带停止运行,机械手运行到瓶子上方,气缸向下抓取瓶子,抓到瓶子后上升,延迟一定时间后传送带恢复运动,移动到箱子上方,光电传感器感应到纸箱时气缸向下运动,到一定程度后松开,完成装箱。部分程序如图7所示。
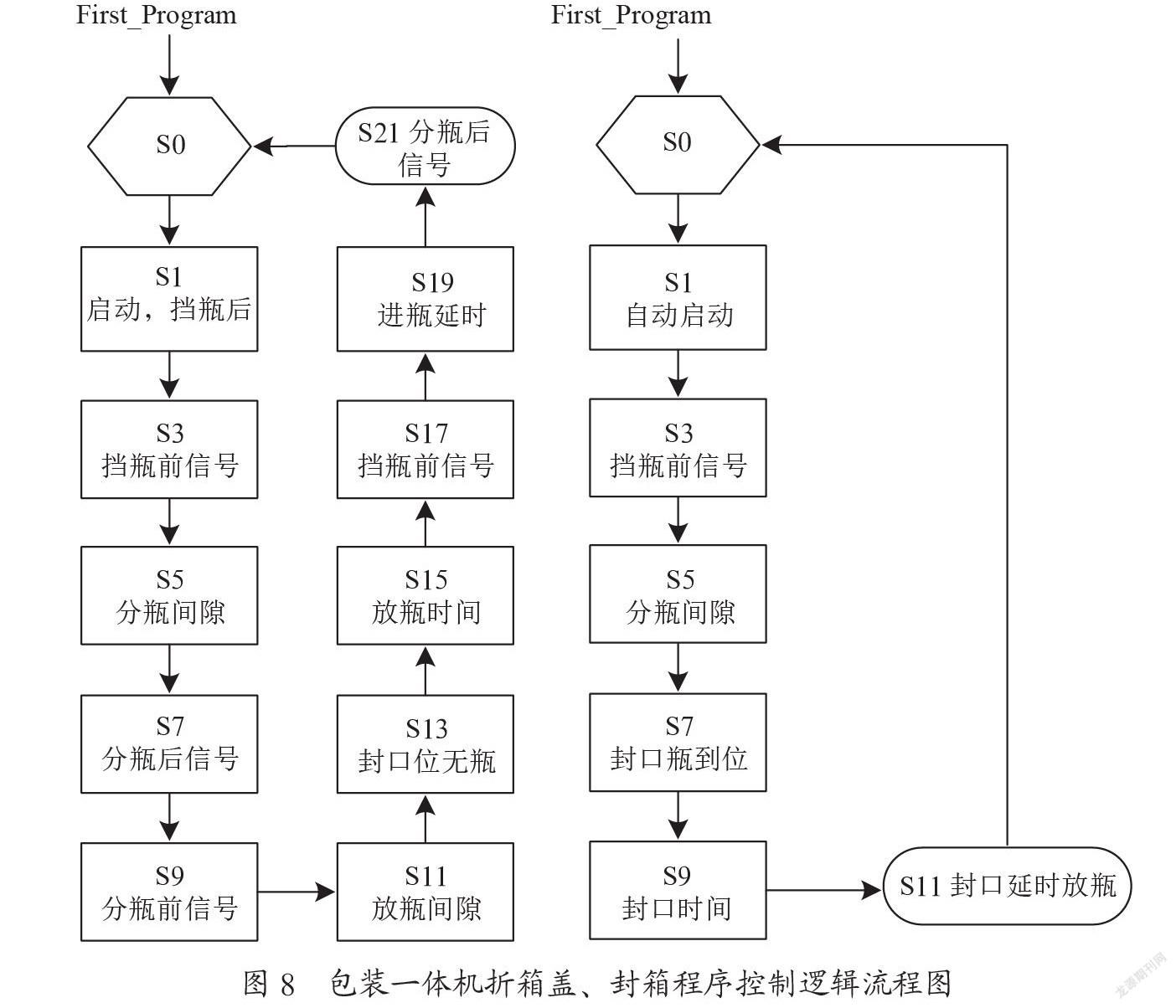
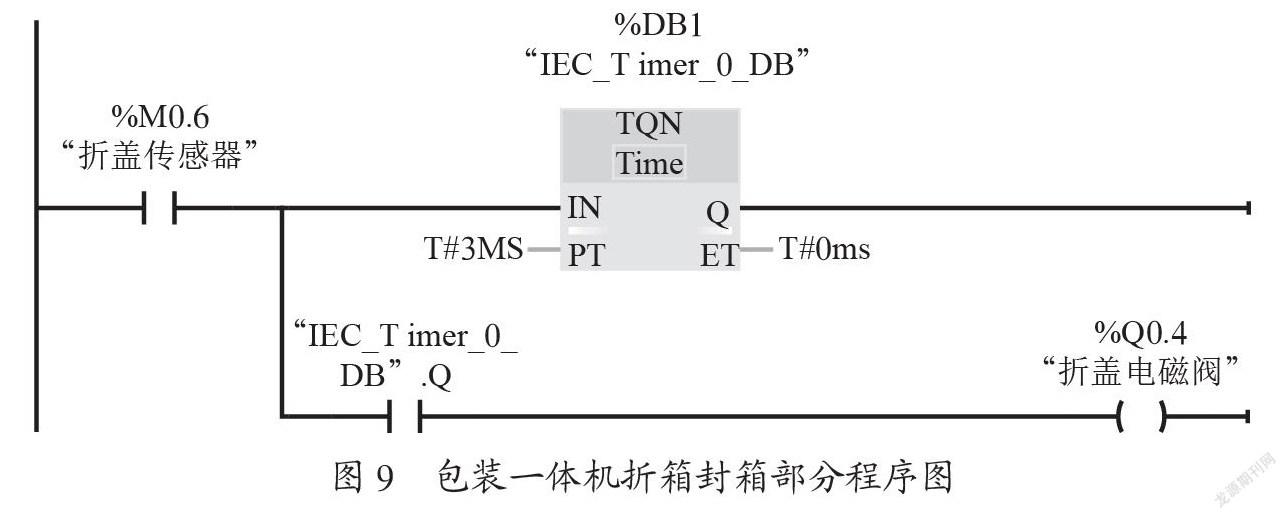
包装一体机折箱盖、封箱程序控制逻辑流程图如图8所示,当箱子装满瓶子后传送带运行,当折箱盖的光电传感器感应到箱子到达后电池阀开始运行进行后撤箱盖,前侧和两翼采用全自动折盖装置,之后运行到自动封箱装置开始进行箱顶的封箱。部分程序如图9所示。
2.4 包装一体机操作系统设计
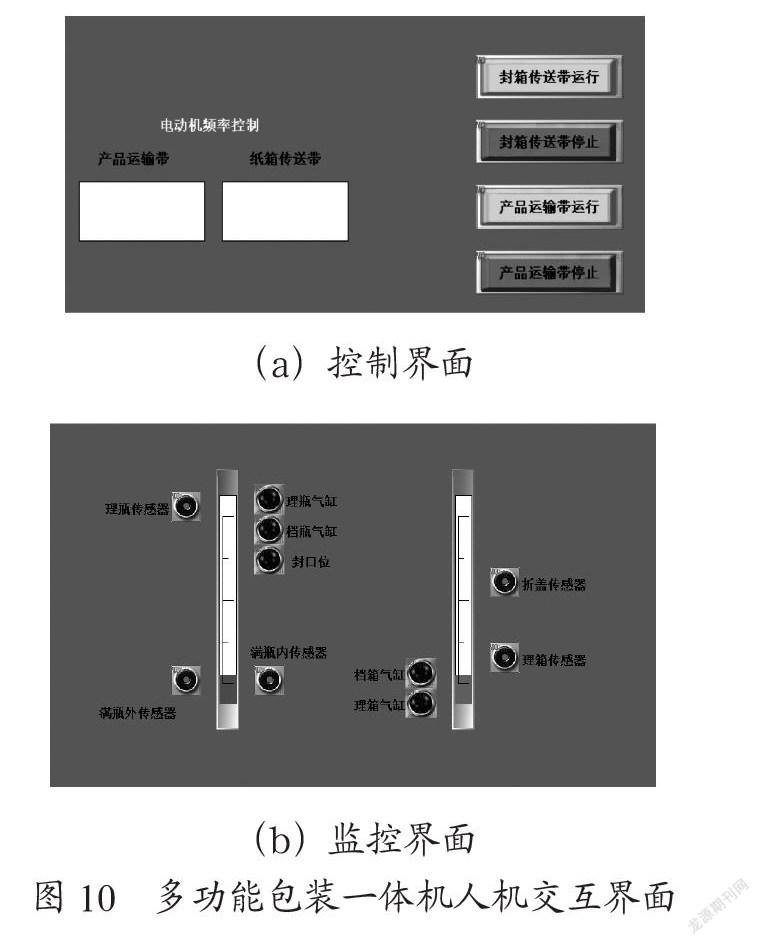
对包装一体机的软件功能需求研究分析后,明确了其控制功能需求和操作功能需求,利用Wincc Flexible人机界面开发平台开发出多功能包装一体机人机交互界面如图10所示,包含“封口—开箱—装箱—折箱—封箱”等功能及拓展贴标功能。
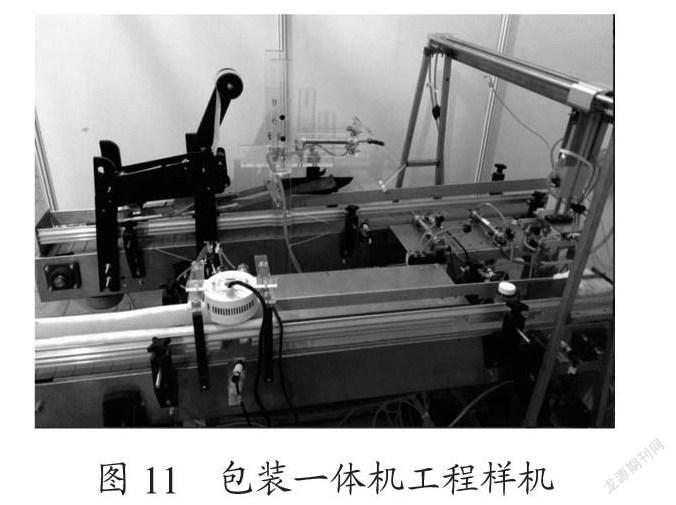
3 运行测试
所研发的多功能包装一体机设备样机如图11所示。经测试,包装一体机前端待密封瓶子经过封口机构时能准确完成瓶口铝膜密封,密封好的瓶子在分瓶机构作用下达到整箱数量后由装箱机构完成装箱,装满瓶子的箱体经过分箱机构后由传送带送达到折箱盖机构,快速完成折箱盖后再由封箱机构实现封箱,整个功能周期为30秒,运行稳定。
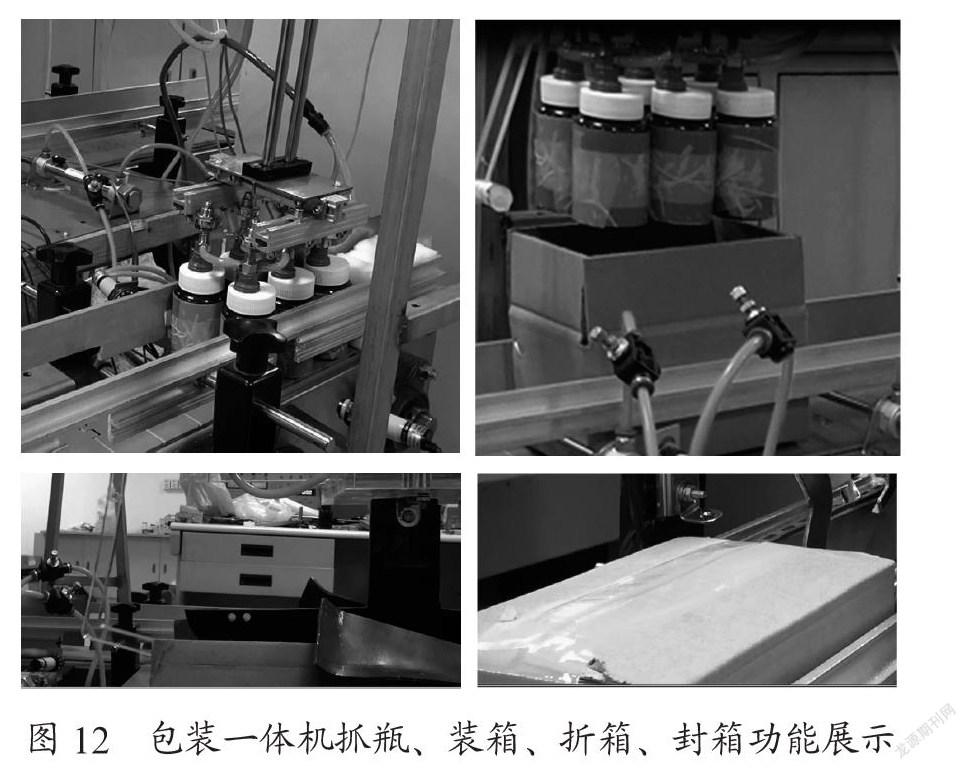
经实验测试,多功能包装一体机在各包装工序运行准确,整个包装过程约120秒,满足设计开发要求,抓瓶、装箱、折箱、封箱等运行效果如图12所示。
4 结 论
多功能包装一体机由封口机构、装箱机构、折箱盖机构和封箱机构组成。封口机构由热封装置用铝膜对瓶口进行密封。装箱机构由无杆气缸、双杆气缸和真空吸盘组成,通过气缸运动实现对瓶子的移动,将瓶子准确无误的放进纸箱内。折箱盖机构为四杆衍生机构,由简单的几块亚克力板、两块铁板和气缸组成,结构简单,简单的机构却能在箱体通过时,快速将箱子上部4个封边盖折好。封箱机构采用五杆机构可将胶带干脆利落的紧贴箱体,完成对纸箱的包装。本产品的控制部分主要采用PLC控制,在整个系统中主要靠光电传感器利用开关量信号接收以及磁性开关的信号接收,PLC的I/O口根据这些检测得到的信号进行计算从而控制电机驱动板来控制电机停止及加减速功能。利用WinccFlexible平台开发设计的多功能包装一体机操作界面,操作方便,能够顺利实现自动与手动模式切换。
参考文献:
[1] 马娟娟.全自动包装机器人系统的研制 [D].南京:南京航空航天大学,2011.
[2] 王勇,庞增拴.基于PLC的全自动软包袋袋码垛控制系统设计 [J].科技创新导报,2015(29):17-18.
[3] 张志伟,罗钦,邹博胜,等.多膜智能包装机的设计与实现 [J].电子制作,2021(19):71-72+97.
[4] 高康,黄倩.智能包装应用现状研究 [J].绿色包装,2019(3):52-55.
[5] 彭宽栋,张学良等.自适应履带机器人的研究与测试 [J].机电工程2017,34(12):1485-1490.
作者简介:张学良(1977.03—),男,汉族,山东潍坊人,副教授,硕士研究生,主要研究方向:机电一体化设备研究。
猜你喜欢
科技创新导报(2016年33期)2017-04-22 20:11:30
江苏农业科学(2017年5期)2017-04-15 10:57:47
科学与财富(2017年1期)2017-03-17 21:56:03
科技创新与应用(2016年31期)2016-12-03 05:53:04
电子技术与软件工程(2016年18期)2016-11-14 01:06:01
科技传播(2016年10期)2016-07-15 23:27:34
软件导刊(2015年7期)2015-08-06 13:24:09
数字技术与应用(2015年5期)2015-07-06 07:15:26
中国高新技术企业(2015年18期)2015-05-20 23:12:38
科技与创新(2015年6期)2015-05-04 23:53:57