基于无人机的森林火险监测预警系统设计
2021-05-07 18:05:50郑少雄王卫星周宇飞吴泽鹏刘泽乾
现代信息科技 2021年21期
郑少雄 王卫星 周宇飞 吴泽鹏 刘泽乾

摘 要:针对传统的森林火险监测存在盲点、实时性差、运营成本高、资源消耗大等问题,提出一种基于无人机的森林火险监测系统。利用图像处理方法设计森林火险监测算法,对无人机采集的图像数据进行处理,及时判断是否有森林火险并发出预警。试验结果表明,文章算法的相对判定准确率为81.97%,相对于其他4种方法,相对判定准确率较高,该文算法性能优于其他算法,可最终实现森林火险的监测和预警功能。
关键词:无人机;森林;火险
中图分类号:TP391 文献标识码:A文章编号:2096-4706(2021)21-0016-05
Abstract: Aiming at the problems of blind spot, poor real-time performance, high operation cost and large resource consumption in traditional forest fire risk monitoring, a forest fire risk monitoring system based on UAV is proposed. Using the image processing method to design the forest fire risk monitoring algorithm, process the image data collected by UAV, judge whether there is forest fire risk in time and send out early warning. The experimental results show that the relative judgment accuracy of the algorithm used in this paper is 81.97%, compared with the other four methods, the relative judgment accuracy is higher. The performance of this algorithm is better than other algorithms, and can finally realize the function of forest fire risk monitoring and early warning.
Keywords: UAV; forest; fire risk
0 引 言
隨着社会的快速发展,在全球气候变化与人类活动的影响下,人们对生态环境的保护提出了新要求。森林火险是八大自然灾害之一,特别是处于荒野中的森林火险,具有蔓延快、控制难、破坏性强等特点[1]。森林火灾会严重破坏生态环境、威胁人们财产和生命安全。如何及时准确地识别火灾,已成为森林火险监测的新要求和新挑战。
当前,森林火险常用的监测方法包括人工巡逻、塔台视频监控和卫星遥感等。其中,人工巡逻监测方法可以灵活选择巡逻路线并深入林区,机动性强,但受地形地貌影响大、效率低,难以监测盲区;塔台视频监控方法借助摄像机等设备,可以观测到大片森林,但在树木密集的区域存在视觉盲区,且缺乏机动性;卫星遥感监测方法能大范围监测,定位准确,全天候观测,但成本较高,只有在形成较大火区时才能识别森林火险[2]。近年来,无人机技术快速发展,其具有飞行速度快、控制方便、实时性强等特点,能应用于森林火险监测、火灾预防和火险救援等作业活动[3]。目前,无人机已在森林火险预防中广泛应用,并发挥了重要作用。
本文提出基于无人机的森林火险监测预警系统,能实现森林火险监测和预警功能。首先,无人机配备高清摄像头并由GPS实时定位,按预设的巡航路线执行飞行任务,确保无人机飞行路线覆盖整个林场区域,将盲点降至最低;然后,无人机采集的图像数据实时传送到地面远程监控终端;最后,根据对图像数据进行分析处理,判断森林火险发生情况,及时将报警信息发送给工作人员以采取救火措施。
1 系统总体设计
1.1 系统硬件设计
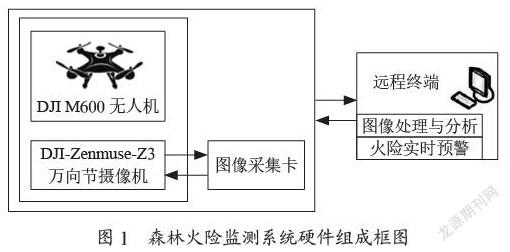
基于无人机的森林火险监测系统由搭载高清摄像头的无人机平台、图像采集系统和远程终端监控系统所组成,系统组成框图如图1所示。
1.1.1 无人机平台
本系统采用DJI M600无人机,配备了高效的电源系统,集成了防尘、自动冷却等功能;能够额外负载6 kg以内的设备;在无额外负载设备的情况下可飞行30 min,最大飞行速度为18 m/s(忽略风况)。为减少无人机飞行过程对图像拍摄的干扰影响,无人机配备了DJI-Zenmuse-Z3万向节摄像机。该摄像机支持3.5倍光学变焦和2倍数码变焦,同时支持30帧/秒的4K超高清视频录制。
无人机硬件部分主要由图像采集与传输模块、飞控模块、通信模块、GPS[4]模块组成,如图2所示,可实现森林火险监测数据的采集与传输、自主定高和飞行控制等功能。
1.1.2 远程终端监控系统
远程终端监控系统的硬件设备包括PC端和通信模块[5],无人机的位置信息和采集的图像信息等传输到远程终端监控系统,经过数据处理后,工作人员可实时查看采集的森林图像。远程终端监控系统具有森林火险监测和报警功能,当发生森林火险时,会触发报警并提供实时预警信息。
1.1.3 图像采集系统
安装在无人机上的云台相机拍摄森林图像和视频数据。采用PTZ摄像机和天创恒达TC-4000 SD图像采集卡,将采集到的视频图像传输到地面站的PC监控系统。数据采集流程如图3所示。
在图像數据采集过程中可能发生丢失帧的情况。当处理帧所需的时间超过两个相邻帧之间的时间间隔时,数据容易丢失[6],缩短帧间处理时间是实现数据实时采集的关键。本系统中,无人机在确定航线后每30 s采集一次视频信号,采集的视频源信号传输至图像采集卡后,经A/D转换再由数字解码器进行解码;将数据转换成视频信号后传输给终端。该过程中,帧捕捉器在输入视频中采集图像数据,并在获取下一帧图像前将数据传输给远程终端机,将帧率缩短至5帧每秒,实现图像采集卡的视频采集和压缩操作并行处理。
1.2 系统软件设计
基于无人机的森林火险监测系统的软件由无人机控制系统、数据处理与通信系统、远程上位机管理系统等组成,框图如图4所示。
1.2.1 无人机控制系统
无人机控制系统除了控制无人机的飞行外,还接收来自无人机各模块的飞行信息,包括路线规划、GPS和飞行控制等模块的信息[7]。
1.2.2 数据处理与通信系统
在该系统中除了对采集的森林图像进行数据处理外,还对系统故障、火险预警、无人机飞行状态和用户登录等信息进行管理。图像采集和传输处理流程图如图5所示。
在森林火险监测系统中,由通信系统保证不同模块间的数据传输,实现无人机和远程终端监控系统间的数据交互,确保数据能实时传回远程终端监控系统[8]。该通信系统中各模块之间的数据交互过程如图6所示。
通信功能通过串行端口编程实现,具体流程为:初始化串行端口InitPort,设置串行端口的波特率,确认串行端口已打开,setup PacketConfig初始化数据传输格式、帧头、帧尾、帧长和存储字节位置;当侦听线程打开,data ready设置为TRUE后才能读取数据;读取数据后,data ready设置为FALSE,否则线程将不再工作;若串行端口不再工作,需要使用ClosePort关闭该端口,否则无法打开另一个串行端口[9]。
1.2.3 远程上位机管理系统
远程上位机管理系统具有图像处理与分析、火险实时预警等功能,如图7所示。此外,远程上位机管理系统还包括林场基础信息、图像处理、数据处理、日志管理等界面。
林场基础信息界面根据各地市林业局的划分,可快速找到相关林场信息,包括林场的经纬度地理信息、植被信息等,帮助工作人员合理部署无人机航线。图像处理与预警界面将采集的图像进行分析识别,一旦发现森林火险,显示火险发生地理位置并及时提醒工作人员。
人工数据处理界面提供了手动处理功能,对采集的火险图像进行灰度和亮度调整,增强预警图像中潜藏的烟火信息,适用于需要人工处理的情况。此外,该界面还提供了图片管理页面,用于存储森林火险图片,并根据用户需要显示历史图片库,如图8所示。另外,日志管理界面可存储后台数据处理的历史记录,备份历史管理操作。
2 算法设计
森林火险的监测采用数字图像进行处理,并进行图像分割、特征提取,最后进行BP神经网络进行识别,实现在线实时监测和预警。火险识别算法流程如图9所示。
具体流程为:(1)通过搭载在无人机上的高清摄像头采集森林图像数据,并将图像数据及时传送到远程终端;(2)使用中值滤波对图像数据进行预处理并去除噪声干扰,以减少森林火险识别过程中数据的丢失;(3)采用R通道分段和FDI指数细分2种方法对森林火险疑似图像进行分割[10];(4)提取有疑似火焰颜色的区域的图像圆度、面积变化率、重心高度比特征;(5)将特征向量输入训练过的分类器进行分析判断,以判断是否发生火险;(6)当发生火险时,触发报警器,及时通知工作人员做好火险扑救工作,否则继续进行监测。
3 试验与结果分析
无人机控制系统采用STM32开发板进行开发,程序和数据存储在嵌入式存储器和RAM中,并使用SDK进行二次开发,对控件进行自定义和功能扩展。远程终端配置了6核Intel-core(TM)i7-8700K CPU@3.7 GHz、16 GB RAM和Windows 10操作系统。
3.1 数据处理速度
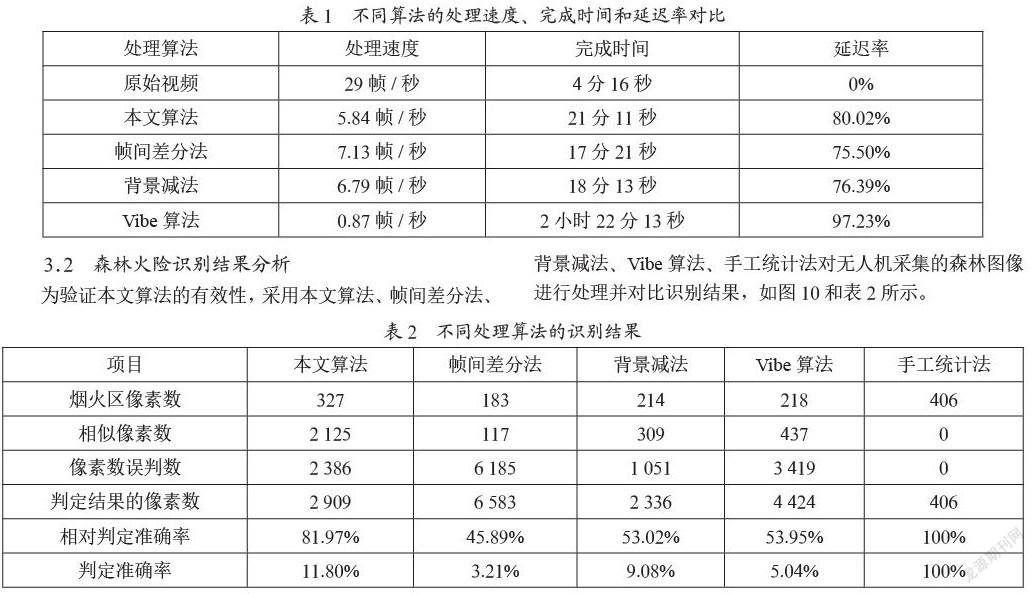
采用本文算法、帧间差分法、背景减法、Vibe算法对长度为4 分16秒的视频进行处理速度、完成时间和延迟率对比,试验结果如表1所示。其中图像序列29 帧/秒,每帧图像的大小为960×540,共7 424个图像。
由表1数据可知:Vibe算法延迟率高达97.31%,对数据进行处理易积累大量的冗余时间。而帧间差分法、背景减法和本文使用的BP神经网络处理速度在每秒6帧左右。由于无人机在航线预先设定的情况下工作,飞行速度一定,场景变化程度低,视频中记录的每一秒信息差异较小,因此可以对视频记录做减帧处理,获得每秒5帧的图像序列。因此帧间差分法、背景减法和本文算法均能满足实时场景下的要求。
3.2 森林火险识别结果分析
为验证本文算法的有效性,采用本文算法、帧间差分法、背景减法、Vibe算法、手工统计法对无人机采集的森林图像进行处理并对比识别结果,如图10和表2所示。
如图10和表2可知:本文算法相对于其他4种方法,相对判定准确率为81.97%,本文算法性能优于其他算法,适用于森林火险监测。
4 结 论
本文主要对无人机、图像采集等进行软硬件设计,开发了基于无人机的森林火险监测上位机软件,通过了对系统中软硬件的详细测试,保证系统各模块的正常运作,以及各模块之间的正常通信。在森林火险识别上,对图像进行了预处理、区域分割、特征提取后,分别使用不同的分类器识别火险图像,对比了一般算法与BP神经网络后,实验结果表明本文的算法能够以更优的准确率识别森林火险,并满足了场景识别下数据实时处理的需求,适用于森林火险的监测。
参考文献:
[1] 曹毅超,吴泽鹏,周宇飞,等.基于循环神经网络的森林火灾识别研究 [J].林业与环境科学,2020,36(5):34-40.
[2] CHEN M,ANG Y T,ZOU X,et al. 3D global mapping of large-scale unstructured orchard integrating eye-in-hand stereo vision and SLAM [J]. Computers and Electronics in Agriculture,2021,187:106237.https://doi.org/10.1016/j.compag.2021.106237.
[3] ZHENG S X,WANG W X,LIU Z Q,et al.Forest Farm Fire Drone Monitoring System Based on Deep Learning and Unmanned Aerial Vehicle Imagery [J]. Mathematical Problems in Engineering,vol.2021,Article ID3224164,13pages,2021.https://doi.org/10.1155/2021/3224164.
[4] 陈再励,李丽丽,钟震宇.面向丘陵山地果树植株的植保无人机轨迹跟踪控制器设计 [J].自动化与信息工程,2018,39(3):1-6.
[5] TRAN B N,TANASE M A,BENNETT L,et al. Evaluation of spectral indices for assessing fire severity in Australian temperate forests [J]. Remote Sensing,2018(10):1680. DOI:10.3390/rs10111680.
[6] AL-SAD M F,AL-ALI A,MOHAMED A,et al. RF-based drone detection and identification using deep learning approaches:An initiative towards a large open source drone database [J].Future Generation Computer Systems,2019,100:86–97. https://doi.org/10.1016/j.future.2019.05.007.
[7] FERNANDEZ-CARRILLO A,MCCAW L,TANASE M A. Estimating prescribed fire impacts and post-fire tree survival in eucalyptus forests of Western Australia with L-band SAR data [J]. Remote Sensing of Environment,2019,224:133-144.
[8] 李旺枝,陸健强,王卫星,等.基于卷积神经网络的热红外图像检测模型 [J].自动化与信息工程,2020,41(6):1-5. https://doi.org/10.1016/j.rse.2019.02.005.
[9] TANG Y ,CHEN M,WANG C,et al. Recognition and Localization Methods for Vision-Based Fruit Picking Robots:A Review [J].Frontiers in Plant Science,2020,11:510. DOI:10.3389/fpls.2020.00510.
[10] 姜冰,陆健强,王卫星,等.适用于多场景的ResNet单幅图像去雾算法 [J].自动化与信息工程,2019,40(2):14-19.
作者简介:郑少雄(1990—),男,汉族,广东饶平人,讲师,博士研究生,研究方向:电子信息技术;通讯作者:王卫星(1963—),男,汉族,河北宣化人,教授,博士研究生导师,博士研究生,研究方向:电子信息技术在农业中的应用。
猜你喜欢
农业灾害研究(2022年2期)2022-05-31 23:30:07
作文大王·笑话大王(2017年1期)2017-02-21 16:08:53
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
作文大王·笑话大王(2016年10期)2016-10-18 14:58:58
科技视界(2016年22期)2016-10-18 14:30:27
作文大王·笑话大王(2016年7期)2016-08-08 11:28:43
作文大王·笑话大王(2016年2期)2016-02-24 11:27:15
当代工人(2015年13期)2015-08-25 22:53:26
河北遥感(2015年3期)2015-07-18 11:12:29