
基于多激光传感器的高精度三维在线测量技术
2021-05-05 01:59:02胥莉莉
制造业自动化 2021年4期
胥莉莉
(中铁第一勘察设计院集团有限公司,西安 710043)
0 引言
近代工业发展迅速,传感器在流水线中的使用频率逐渐加大,因此对三维测量的需求也越来越高。早期的激光传感器摄像机参数标定是技术人员通过自己的经验来预估的,需要大量的数据支撑,使得标定时间过长,并且不能准确实现参数的自动标定。目前,较为常用的参数标定方法是线性建模法。该方法通过建立传感器摄像机参数之间的线性方程进行评估,但是很难获得高精准度的标定结果。
为了改善传统测量方法存在的问题,现阶段常用的方法有相位测量轮廓术(PMP),傅里叶变换轮廓术(FTP)调制度测量轮廓术(MMP),上述方法有一个共同点即通过调制结构光场实现物体测量,但是实际上在线三维测量过程中,由于物体是运动的,导致所采集图像的像素坐标和物点坐标不相符。
为解决传统方法存在的问题,提升激光传感器的测量精准度,提出了一种基于多激光传感器的高精度三维在线测量技术,将三维在线测量技术与激光传感器进行拟合。同时利用空间高斯滤波方法处理激光线图像来提升激光线质量,处理后灰度值峰值点位置比处理前更接近于正常点。
1 基于多激光传感器的高精度三维在线测量技术
1.1 三维在线测量原理
三维在线测量是利用计算机编程翻译产生正弦光栅:

将式(1)做变换可得:

式中,Gn0(fx,fy),Gn1(fx,fy),G-n0(fx,fy),分别是第n帧变形条纹的零级和正负极谱[1]。运用空间滤波对一级谱做逆傅里叶变换,得到:
根据式(3)将调制度分布定义为PN(xn,yn)的模型,即:

一般情况下,利用调制度可以实现物体的三维在线测量。但是,当被测物体表面相对复杂时,易受到外界严重光强的影响。
通过以上分析可知,如果参考面是一个平面,那么其调制度一般较大,同时,不存在明显的特征,会在一定程度上影响计算的速度[2]。因此对物体调制度分布进行分析,减少阴影调制度对测量结果的影响。具体实现方法如下:
建立两个调制度T1,T2阈值,为了提高T1,T2之间的匹配速度和匹配精度,对此本文作出了大量实验研究,提出了一种选择方法,设T1,T2的取值为:

式中,ε1、ε2均为层析厚度,为了避免参数取值对匹配精度的影响,因此它们的取值在不影响其他数据的前提下越小越好,提取调制度层析信息Sn(xn,yn)为:

将第一帧变形条的调制度层析图S1(x1,y2)的有效区域标记为模板C,模板C与经同样处理的第n帧物体变形条纹的调制度层析图进行运算,这样相关度最大位置的坐标就能反映物体的移动,从而实现物体的位移测量[3]。为提高解相精度,需对相位进行展开:
式中,a、b和c均表示常数。
2.2 多激光传感器参数标定方法
为进一步提高测量精准度,以三维在线测量原理为基础,建立多激光传感器参数标定的数学模型进行三维在线测量与多激光传感器的拟合。通过坐标系构建摄像机坐标系与激光传感器坐标之间的联系,设定一个目标点P(xn,yn,zn),把传感器当作导向,构建(xa,ya,za)为空间坐标系,图像像素二维坐标(u,v)的物理坐标为(x,y),获得摄影器材的成像框架如图1所示。
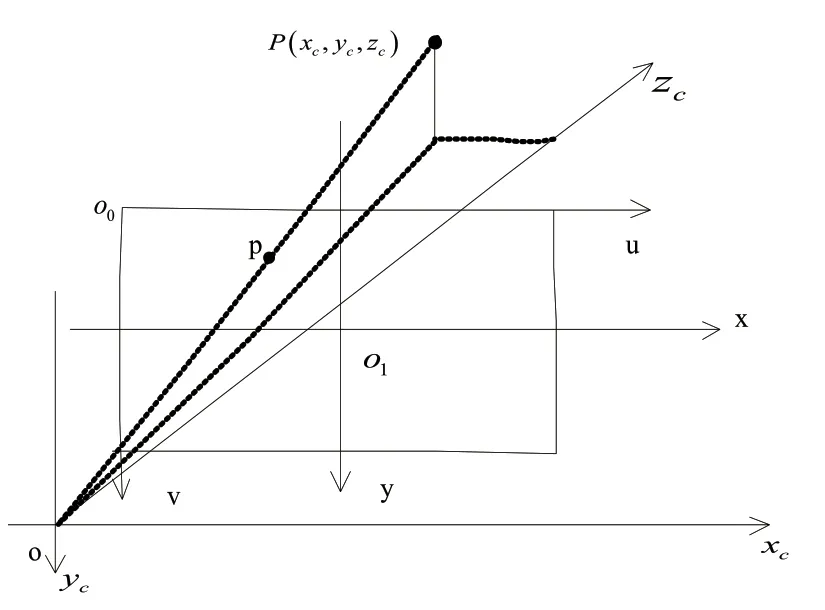
图1 摄像机成像框架
传感器与坐标(u,v)之间构成的关系为:

式中,M为传感器中的投影矩阵。同理,从图像中检测出点P与P1,P2,通过线性标定法标定后,所获得的投影矩形方阵分别为M1,M2,那么通过式(9)就可以得到:
根据上式可得P的空间坐标位置如图2所示。

图2 测量机中的空间点
由于光照、正交误差等各种因素的影响,导致成像过程中会形成一种非线性关系,为解决这个问题,本文运用最小二乘向量机对传感器的参数进行模型建立与标定[4]。最小二乘支持向量机是一种能够通过向量机变形将不等式束约变成等式束约的方法,这样标定之后传感器的性能不但不会减弱,解法速度也会变快。


式中,w和b是权向量和偏执量,根据对式(12)进行转换得到目标函数,并对其进行求解,得到式(12)中w和b的值。



利用最小二乘支持向量机将由式(14)得到的非线性系统变换成线性系统,得到:

至此建立回归模型为:
通过选择不同的分析方法来减小LSSVM回归结果的影响。实验结果如表1和表2所示。

表1 向量参数对最小二乘支持向量机回归性能的影响

表2 σ对最小二乘支持向量机回归性能的影响
对表1和表2进行分析可得,最小二乘支持向量预测的准确性差异很大,要使激光传感器的标定结果具有高精度,参数选择的问题是必须要解决的[5]。针对参数组合优化结果,需要通过提取激光线来解决以上问题。
2.3 激光线高斯滤波及激光线提取
激光线提取的精度直接关系到物体几何尺寸测量的稳定性。因此为了改善激光线测量质量,以多激光传感器参数标定为基础,使用空间高斯过滤法来过滤测量激光成像图像。空间高斯滤波器系数是由高斯函数确定的:

式中,(i,j)为点坐标;(i+m,j+m)为领域坐标;a为高斯权系数,所选取的滑动窗口内各个系数之和为1。从当前图像像素点开始,通过计算窗口中每个像素点的位置来获取过滤后的图像。经过高斯滤波的光线处理后,和过滤前图像作对比,所选图像激光线的连续性得到了大幅度的提升,空间高斯曲线更加趋近平滑,灰度值峰值点位置也比过滤之前更接近于正常点。
在上述步骤的基础上,采用灰度质心法提取激光线中心点像素,设图像列j峰值点的半径为R,那么就可以得到计算重心坐标的公式为:
用灰度值质点和峰值点来提取激光线中心点主要分为以下几个步骤:
1)对待处理的一列图像像素的灰度值进行提取,从而获得该激光图像列的灰度曲线,并且找出灰度值峰值的位置。
2)从峰值位置开始,将周围适当范围内的领域灰度值进行提取,从而计算出质心的准确位置。
3)从灰度值质心位置开始,逐点跟踪激光线的中心点与其左右两侧。
4)逐列寻找激光线的中心点,并且一直确认到激光线的两端为止,完成高精度三维在线测量。
3 实验与分析
为验证本文所提基于多激光传感器的高精度三维在线测量技术的可行性,选取堆场进行实地验证。利用不同堆场取料机分别对矩形堆场、圆形堆场和三角形堆场进行了连续3次的激光测量,得到的具体计算参数如表3所示。
其中,长方形堆场每隔15cm截取一个断面,圆形堆场每隔0.6°截取一个断面,根据表1中的参数得到三个堆场的测量结果如表4所示。

表3 堆场实际测量参数

表4 三个堆场的测量结果
分析表4可知,运用本文技术对三个堆场进行测量所得的误差值均低于0.1%,该误差值较小,能够满足实际测量需求。这是由于本文方法采用最小二乘向量机对传感器的参数进行模型建立与标定处理,该操作能够降低正交误差和光照等因素的影响,从而提高了测量结果的精确度。
为了进一步明确本文技术的实际应用价值与优势性,将其与传统PMP、FTP和MMP方法进行对比,测试上述方法在测量用时方面的不同。图3为不同方法的测量时间对比结果。

图3 不同方法的测量时间对比
分析图3可知,本文技术所用的测量时间基本上保持在20s以下,而传统PMP、FTP和MMP方法所消耗的测量时间较长,明显高于本文方法,其中,MMP方法的测量时间更是达到了65s以上,已经不能满足实际需求。综上实验证明采用本文中提出的测量技术,可以实现高精度三维在线测量,解决了传统测量中人为影响大,周期长、精度低的问题。
4 结语
为了提升测量精准度与效率,本文以三维在线测量为基础使用激光传感器摄像机参数标定方法,将三维在线测量与激光传感器进行拟合,采用空间高斯滤波方法对激光线图像进行相关处理,经过处理后,激光线图像的连续性得到提升,使成像更为清晰。分析实验结果可知,该测量方法有效的提升了在线测量的有效性和准确性,接下来会以进一步简化该技术为目标,进行深入探讨。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
智能建筑电气技术(2022年2期)2022-02-06 02:30:50
高技术通讯(2021年3期)2021-06-09 06:57:48
汽车维修与保养(2020年11期)2020-06-09 05:42:16
运筹与管理(2019年1期)2019-02-15 09:26:42
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年3期)2016-11-07 09:03:34
光学精密工程(2016年1期)2016-11-07 09:01:59
集装箱化(2014年12期)2015-01-06 18:31:36
