具有预见性巡航功能的卡车巡航控制系统开发
2021-05-05 13:40:58朱青松李军伟宋振斌李兴坤郑旭光
农业装备与车辆工程 2021年4期
朱青松,李军伟,宋振斌,李兴坤,郑旭光
(1.255049 山东省 淄博市 山东理工大学 交通与车辆工程学院;2.266043 山东省 青岛市 中寰卫星导航通信有限公司青岛分公司)
0 引言
随着汽车电子技术的高速发展[1-4],为了缓解卡车驾驶人员在高速公路运输中的驾驶压力,减轻驾驶员的疲劳程度,定速巡航系统以及自适应巡航控制系统等先进的辅助驾驶系统在卡车上的应用已经普及[5-7]。传统的卡车定速巡航系统通过调节发动机的扭矩实现卡车以设定的车速为目标进行匀速行驶[8-13],在一定程度上能够减轻驾驶员的负担,不需要驾驶员进行过多的驾驶操作,并且在平缓道路上通过匀速行驶能够减少卡车行驶的油耗。但由于中国的道路状况错综复杂,一些多山地区的道路较陡,卡车在较陡的坡道上通过定速巡航系统控制行驶时,会加大卡车的燃油消耗,增加运输成本[14-15]。
预见性巡航控制(Predictive Cruise Control,PCC)系统是以定速巡航系统为基础,以提高燃油经济性、安全性和舒适性为目标开发的一种新的高级自动辅助驾驶系统[16-18]。该系统能够根据卡车行驶前方道路的状况,通过相应的控制方法规划出卡车在前方道路行驶时的最佳节油扭矩,以该目标扭矩驱动卡车在前方道路上行驶,以达到省油的控制目标。
为了在减轻驾驶员驾驶负担的同时减少卡车的燃油消耗,降低卡车的运输成本,增加卡车驾驶的安全性和舒适性,针对传统卡车辅助驾驶系统的不足,本文开发出一种具有预见性巡航功能的卡车巡航控制系统,通过模糊PID 实现对卡车巡航车速的控制。通过在巡航系统中集成预见性巡航的扭矩和挡位执行功能,扩展了定速巡航系统的功能,进一步提高了巡航控制系统的燃油经济性。最后通过硬件在环测试,验证了巡航系统的控制效果。
1 卡车巡航系统基本结构
卡车传动系统的结构可以简化为如图1 所示,主要由发动机、离合器、变速器、主减速器和车轮等部分组成。

图1 卡车传动系统简化结构图Fig.1 Simplified structure diagram of truck transmission system
巡航系统主要涉及对卡车传动系统关键部件的控制,实现卡车的定速巡航和预见性巡航。巡航系统控制策略根据多功能杆状态、发动机控制器(ECU)、变速器控制器(TCU)、预见性巡航控制器(PCC)以及整车工作状态等信息,控制定速巡航激活,并跳转进入匀速、加速、减速、从退出状态恢复车速和进入预见性巡航等巡航模式。若出现卡车故障、驾驶员介入巡航等巡航退出条件时,则退出巡航;若故障排除重新恢复巡航时,则需控制定速巡航系统恢复到设定的车速。基于以上分析,将巡航系统划分为:巡航模式识别模块、巡航退出条件判断模块和巡航车速管理模块3 部分。巡航系统的整体架构如图2 所示。
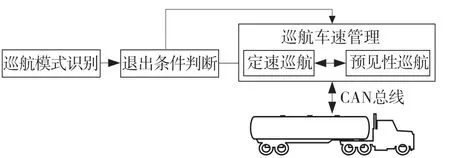
图2 巡航系统整体架构Fig.2 Overall architecture of cruise system
2 巡航模式识别模块
通过分析巡航系统的功能,将巡航系统的工作模式分为:定速巡航速度保持、定速巡航加速、定速巡航减速、定速巡航恢复车速(从较高车速恢复车速、从较低车速恢复车速)和预见性巡航模式。基于定速巡航工作模式之间的跳转,可以实现卡车定速巡航的功能,并能够在满足预见性进入条件的情况下(车辆GPS 定位和前方道路坡度已知),跳转进入预见性巡航模式。各模式之间的迁移逻辑如图3 所示。

图3 巡航模式识别模块状态迁移Fig.3 Cruise mode recognition module state transition
巡航模式识别模块通过识别多功能杆输入和整车状态输入,控制巡航系统进入对应巡航状态,在对应巡航状态下输出不同的期望巡航车速、巡航初始控制扭矩和巡航模式,为车速管理模块提供车速和初始扭矩输入。巡航模式识别模块的功能如图4 所示。

图4 巡航模式识别模块功能示意图Fig.4 Function diagram of cruise mode recognition module
巡航识别模块中,各个巡航状态的切换逻辑为:定速巡航初始状态为关闭状态,多功能杆开关打开后,巡航系统进入定速巡航空闲状态,等待巡航激活;在空闲状态下,驾驶员按SET 键(加速或减速键)激活定速巡航,将当前车速设置为期望巡航车速,巡航系统进入速度保持模式;驾驶员按加速键,巡航系统进入定速巡航加速状态,在加速状态中,按照固定斜率提高期望巡航车速,引导车速管理模块提高输出扭矩,控制车辆加速;驾驶员按减速键,巡航系统进入定速巡航减速状态,在减速状态中,按照固定斜率降低期望巡航车速,引导车速管理模块降低输出扭矩,控制车辆减速;在发生退出条件后,巡航系统切换回空闲状态,此时,驾驶员通过按多功能杆恢复键,控制巡航系统恢复至退出之前的期望巡航车速。
在满足预见性巡航进入条件的情况下,巡航系统进入预见性巡航模式。在预见性巡航模式下,通过执行预见性巡航控制模块的控制扭矩和目标挡位,巡航系统实现对车速和挡位的控制。该模式下的挡位和扭矩由预见性巡航控制器计算得出,本文开发的巡航系统仅涉及在预见性巡航状态下对其输出挡位和扭矩信息的解析和执行。为实现预见性巡航模式,制定了与预见性巡航控制器的通信协议,通过4 个字节的数据包,实现预见性巡航控制关键信息的解析,包括预见性巡航扭矩、目标挡位和激活状态。预见性巡航数据的具体结构如图5 所示。
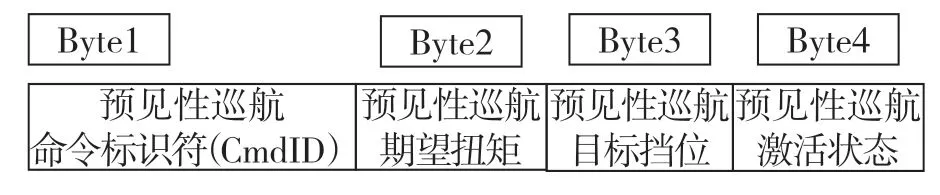
图5 预见性巡航控制器输出数据结构Fig.5 Predictive cruise controller output data structure
3 巡航退出条件判断模块
为确保巡航系统不会影响驾驶员对车辆的操作,保证驾驶员对车辆的优先控制,巡航退出条件判断模块会检查所有与巡航退出相关的条件,导致巡航退出的情况共有3 种,分别为车辆状态异常、驾驶员干预巡航和巡航状态异常。巡航退出策略如图6 所示。
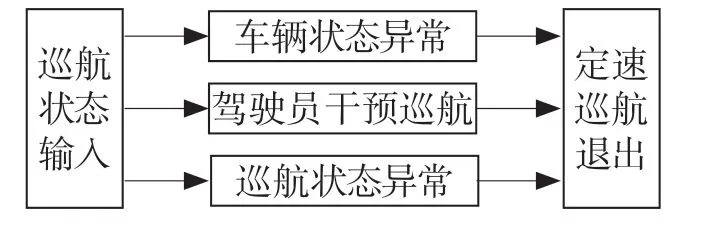
图6 巡航退出模型策略Fig.6 Cruise exit model strategy
根据发生退出原因的严重程度不同,将退出状态分为不可恢复直接退出和可恢复退出2 种。当不可恢复退出原因发生后,巡航直接退出,当可恢复退出原因发生后,巡航暂时退出进入空闲模式,待退出原因消失后巡航恢复至正常状态。
不可恢复的退出原因有:(1)车辆状态异常,包括多功能杆模式错误、刹车失效、加速踏板失效、离合器失效、发动机转速检测失效、车速检测失效、增压装置失效、高压共轨失效、整车加速度过大;(2)驾驶员操作退出巡航,包括驾驶员关闭多功能杆、驾驶员踩刹车。
可恢复的退出原因有:驾驶员踩油门加速超车、驾驶员手动换挡、车速不在巡航允许范围内、变速器不在合适挡位、司机手动操作排气制动等。
在退出条件发生后,将巡航模式切换到巡航关闭模式,以等待驾驶员按恢复键重新进入定速巡航。
4 巡航车速管理模块
巡航车速管理模块的功能为协调定速巡航和预见性巡航的扭矩输出,实现巡航系统对车速和挡位的控制。
首先,巡航车速管理模块基于模糊PID 实现控制扭矩的实时计算输出,车速管理模块的模糊PID 控制原理如图7 所示。图中,当前车速(V)与期望车速(Vd)的差值为车速误差(e),在单位步长中车速误差的变化量为车速误差变化率(ec)。将车速误差和车速误差变化率加到模糊控制器的输入端,将其转化为模糊输入语言变量,由模糊推理器根据模糊推理规则推导出模糊输出量,最后经过解模糊过程输出精确的控制量Kp',Ki',Kd',它们的值被转化为0~1 之间的值,为了减少浮点运算,对其值乘以固定比例系数进行了放大。在实际PID 控制器的应用中需要乘以适当的比例因子Gp,Gi,Gd以得到真正的PID 参数Kp,Ki,Kd。

图7 模糊PID 车速管理器控制原理图Fig.7 Schematic diagram of fuzzy PID speed manager control
车速管理模块的PID 控制算法原理如式(1)所示。

式中:Trq——控制扭矩;k——采样序号;T——采样时间;Kp——比例系数;Ki——积分系数;Kd——微分系数。
其次,车速管理模块基于预见性巡航控制器的数据输入,结合整车运行状态和定速巡航状态,适时输出预见性巡航的控制扭矩和挡位,实现预见性巡航状态下对卡车车速的控制。
5 实车测试
通过Kvaser 调试工具,将Simulink 下的定速巡航控制模型与实车连接成一个完整的闭环控制系统。Simulink 模型通过Kvaser 连接到整车OBD 接口,接入到整车CAN 总线网络。所搭建硬件在环平台如图8 所示。图9 为测试所用车辆。

图8 硬件在环测试平台Fig.8 HIL test platform

图9 JH6 实车测试Fig.9 JH6 real vehicle test
所用实验卡车的关键参数如表1 所示。

表1 实验重型卡车的参数Tab.1 Experimental heavy truck parameters
使用搭建的硬件在环测试平台,在空挡、空车原地进行测试。车速由发动机转速,结合12挡传动比和主减速器传动比以及轮胎半径等计算得出。即模拟在卡车巡航过程中最常见的最高挡的巡航状态。测试数据由CCP 标定监测系统在实验中记录获得,CCP 数据记录间隔为100 ms。实验结果分析图的时间轴(横轴)由实际采样点表示,每个采样点间隔时间为100 ms,即每隔100 ms 记录一次实验数据。
5.1 定速巡航加速-保持车速测试
图10 为定速巡航速度微调加速车速测试结果。从图10 可以看出,在实时车速为93.8 km/h巡航过程中,驾驶员短按加速键2 次,每次期望巡航车速提高1 km/h,期望巡航车速由93.8 km/h提高至95.8 km/h。通过定速巡航的较低车速恢复车速模式,将卡车巡航车速提高至95.8 km/h,并随后将实时车速保持在95.8 km/h。测试结果表明巡航执行正常,车速调整符合预期。

图10 定速巡航速度微调加速车速图Fig.10 Accelerating speed chart of fine-tuning cruise speed at fixed speed
5.2 定速巡航减速测试
定速巡航持续减速测试结果如图11 所示。

图11 定速巡航持续减速测试车速图Fig.11 Speed chart of constant-speed cruise deceleration test
由图11 可以看出,在车速为84 km/h 巡航过程中,驾驶员长按减速键,期望巡航车速以固定斜率下降,车速管理模块降低输出扭矩,使实时车速减小,随后驾驶员松开减速键,期望车速更新为74 km/h,定速巡航保持实时车速在74 km/h处,进入速度保持模式。巡航模式跳转正常,车辆减速符合预期,激活状态符合预期。
5.3 定速巡航恢复车速测试
定速巡航恢复车速测试结果如图12 所示。该测试模拟定速巡航退出后,驾驶员按恢复键恢复定速巡航。由图12 可以看出,按恢复键后,实时车速为60 km/h,小于退出前期望巡航车速62 km/h,巡航应进入从较低车速恢复车速模式,在第0.3 s 车速正常恢复至期望巡航车速。
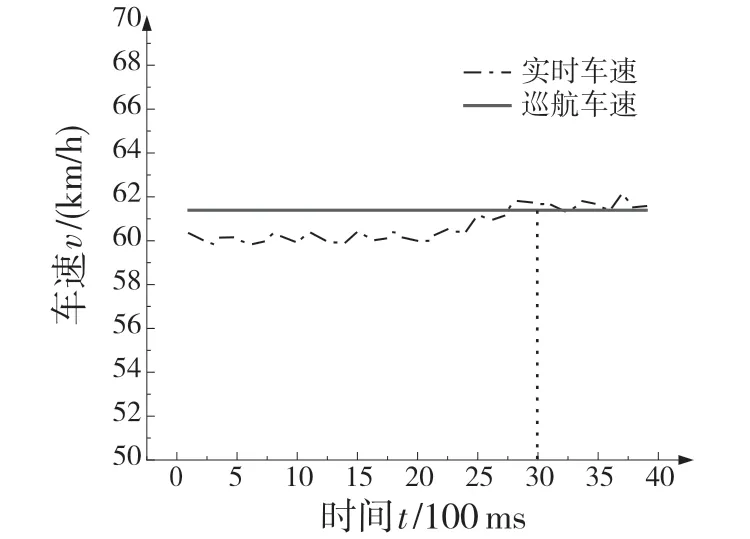
图12 巡航恢复车速图Fig.12 Cruise recovery speed chart
5.4 定速巡航跳转至预见性巡航模式执行测试
定速巡航跳转至预见性巡航模式测试结果如图13 所示。由图13 可以看出,在第1.2 s PCC激活后,定速巡航切换到预见性巡航模式。在1.3 s定速激活后,此时的扭矩输出应等于预见性巡航计算出的扭矩,由实验结果可以看出巡航系统可以正常输出预见性巡航控制器扭矩。

图13 定速巡航跳转至预见性巡航模式图Fig.13 Jumping from constant speed cruise to predictive cruise mode map
PCC 退出测试结果如图14 所示。在第0.4 s,PCC 退出,此时定速巡航需接管车辆控制车辆继续行驶,可以看出在第0.6 s 巡航模式变为恢复车速模式,巡航切换至车速恢复模式。实验结果表明,在PCC 退出后,巡航系统能够切换到定速巡航状态控制车辆行驶,模式跳转正常。

图14 预见性巡航退出测试模式图Fig.14 Diagram of predictive cruise exit test mode
PCC 换挡测试结果如图15 所示。可以看出,在第1.1 s 左右,PCC 挡位变为11 挡,定速巡航需要准确执行预见性巡航所发送挡位,在接收到预见性巡航挡位信息后,在第2 s 将变速器选中挡位设置为目标挡位,引导变速器切换至PCC挡位。随后在第8 s 可以看出,变速器当前挡位变为11 挡,变速器完成换挡,挡位切换至PCC挡位。实车测试结果表明,换挡执行准确,能够实现预见性巡航下车辆的换挡。
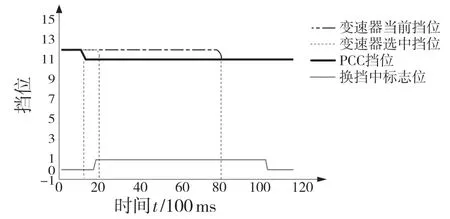
图15 预见性巡航换挡测试图Fig.15 Predictive cruise shift test chart
6 结论
本文以一汽解放JH6 为实车平台,设计了应用预见性巡航的卡车定速巡航控制系统,由巡航控制模式识别模块、退出条件判断模块和车速管理模块3 部分组成。运用模糊PID 控制策略对巡航车速进行控制,通过在巡航系统中集成预见性巡航的扭矩和挡位执行策略,扩展了定速巡航系统的功能。并对巡航控制策略进行了硬件在环实车验证,根据实验结果可得到如下结论:
(1)所设计的卡车巡航控制策略,能够实现各巡航状态之间的模式跳转,响应速度快,能够实现卡车的定速巡航和预见性巡航。
(2)对卡车巡航控制策略进行硬件在环实车试验,进行了加速-保持车速测试、减速测试、巡航恢复车速测试和预见性巡航执行测试,测试结果表明:巡航模式间能够快速切换,巡航激活时车速稳定,能够达到期望巡航车速并实现车辆的换挡。
(3)所提出的卡车巡航控制策略能够运用于实车,在巡航激活状态下,有效提高驾驶员的舒适性,降低驾驶员的负荷,并且在巡航时有助于降低燃油的消耗。
猜你喜欢
石家庄职业技术学院学报(2018年6期)2019-01-18 12:45:26
环球市场(2018年19期)2018-09-10 03:36:04
汽车维修技师(2017年8期)2018-01-08 01:06:50
汽车维修技师(2017年6期)2017-11-18 06:01:49
湖州师范学院学报(2016年2期)2016-08-21 13:51:06
汽车维修与保养(2015年7期)2015-04-17 02:12:38
中国当代医药(2015年23期)2015-03-01 02:05:57
中国当代医药(2015年1期)2015-03-01 02:00:36
汽车维护与修理(2015年5期)2015-02-28 12:16:30
实用临床医学(2014年6期)2014-02-28 09:18:35