标注Petri 网中的最小初始标识估计
2021-04-29 03:21:50徐淑琳周广瑞
计算机工程 2021年4期
徐淑琳,周广瑞,岳 昊,2
(1.青岛大学自动化学院,山东青岛 266071;2.青岛大学复杂性科学研究所,山东青岛 266071)
0 概述
Petri 网是一种用于离散事件系统建模、分析和控制的工具,具有图形和数学的双重表现形式且可有效描述系统行为。近年来,Petri 网被应用于交通系统[1]和柔性装配制造系统[2]等多种实际系统中,且在系统安全及可靠性分析[3-4]、业务流程分析[5-6]、交互控制[7]以及Web 服务分析和替代[8]中也有广泛应用。随着实际系统规模的增大,标识估计对离散事件系统的诊断[9]和控制器设计[10-11]等具有重要的作用。
关于Petri 网中标识估计问题的研究已经取得显著成果[12-13]。文献[12]基于对标注序列的观察,讨论了初始标识已知的Petri 网中的标识估计问题,并指出标识集可用一组具有固定结构的线性不等式来描述。文献[13]也研究了标识估计问题,并证明所有可能的标识数目是关于k的函数。最小初始标识的估计成为当今研究的热点之一,例如文献[14]讨论了含有可观测变迁的标注Petri 网中的最小初始标识估计问题,并提出一种最小初始标识估计算法。文献[15]将文献[14]中的结果扩展到含有不可观测变迁的标注Petri 网中。文献[16]提出一种用于估计由标注Petri 网中的最小代价计划序列的算法。文献[17]通过使用基可达图寻找标注Petri 网中最小代价变迁序列。
针对不可观测变迁的存在给求解标注Petri 网建模制造系统中的最小资源带来困难的问题,本文放宽对不可观测变迁发生个数的限制,且允许可观测在变迁前至多有2 个不可观测变迁发生。为了更好地实现估计最小初始标识的目标,本文以标注Petri 网为工具,进一步讨论了文献[14-15]提出的最小初始标识估计问题,并提出一种基于动态规划的新算法,以估计最小的初始标识。
1 基本概念
本节给出下文将会用到的Petri 网和标注Petri网的相关定义,更多详细介绍可参阅文献[14]。
定义1[18-19]将一个Petri 网定义为一个四元组N=(P,T,F,W),其中:1)P={p1,p2,…,pn}是一个有限的库所集,库所使用空心圆圈表示;2)T={t1,t2,…,tm}是一个有限的变迁集,变迁使用实心竖条表示;3)P∪T≠∅,P∩T=∅;4)F⊆(P×T)∪(T×P)为流关系集合;5)W:F→ℕ={0,1,2,…}称为权函数。
如果pi和tj之间没有弧,则W(pi,tj)=W(tj,pi)=0。如果N没有直接的循环存在,则称N是无环的。
定义2[17]在一个Petri 网N=(P,T,F,W)中,若P={p1,p2,…,pn},T={t1,t2,…,tm},则N的结构可用关联矩阵A表示,其中:1)A=A+−A−;2)A−为N的输入关联矩阵,A−=[]是一个n行m列的整数矩阵,=W(pi,t)j(1≤i≤n,1≤j≤m);3)A+为N的输出关联矩阵,A+=[]是一个n行m列的整数矩阵,=W(tj,pi);4)若pi和tj之间没有弧,则==0;5)A(:,t)(或者A−(:,t),A+(:,t))是A(或者A−,A+)中对应于变迁t的列,且A(:,t),A−(:,t),A+(:,t)均为列向量。
定义3(N,Μ0)是一个初始化的网系统,Μ0是系统的初始标识。映射Μ:P→ℕ 称为Petri 网N的一个标识,标识Μ的每个分量都对应相应库所中托肯的数目,托肯用实心圆点表示。对于p∈P,库所p中的托肯数记为Μ(p),标识Μ的所有库所中的托肯总数记为。
定义4[14]Petri 网N=(P,T,F,W)具有以下变迁发生规则:
1)对于变迁t∈T,如果t的每个输入库所pinput都有至少A−(pinput,t)个托肯,则变迁t在标识Μ下具有发生权,并定义为Μ[t〉。
2)如果变迁t发生,则t的每个输入库所pinput都被移除A−(pinput,t)个托肯,并且t的每个输出库所poutput都增加A+(poutput,t)个托肯,变迁t在标识Μ下发生会使得系统到达一个新标识Μ΄=Μ+A(:,t),并记为Μ[t〉Μ΄。
定义5[20]Petri 网N=(P,T,F,W)的可达性可定义为:若存在t∈T使得Μ[t〉Μ΄,则称标识Μ΄从Μ直接可达;若存在一个变迁序列σ=t1t2…tk,其中ti∈T,使得Μ[t1〉Μ1[t2〉…Μk−1[tk〉Μk=Μ΄,则称标识Μ΄从Μ可达。按此规定,从Μ可达的一切标识集合记为R(Μ)。
定义6给定一个变迁序列σ∈T*,其中T*表示一系列有限长度的变迁序列集合。令π:T*→ℕn为一个映射,y=π(σ)是一个m维非负向量,称为σ的发生数向量。y(i)表示变迁序列σ中变迁t出现的次数。对于零长度的空串ɛ∈T*,其发生数向量为零向量,即π(ɛ)=0m。
定义7[17]将一个标注Petri 网定义为一个四元组(N,Μ0,L∪{ɛ},l),其中:1)N=(P,T,A,W)是一个Petri 网,Μ0是Petri 网N的初始标识;2)L是非空标注的集合,标注用一个字母表示;3)l:T→L∪{ɛ}是标注函数,其中每个变迁都对应一个字母或者一个空字符串∫。
由于本文考虑的是含有不可观测变迁的标注Petri网,因此可以将变迁集合T划分为所有不可观测变迁的集合Tu和所有可观测变迁的集合To这2 个集合,且满足Tu∪To=T和Tu∩To=∅。对于一个标注l∈L,用Tl={t∈T|l(t)=l}表示与非空标注l对应的所有可观测变迁的集合,Tu={t∈T|l(t)=ɛ}表示与空标注ɛ对应的所有不可观测变迁的集合,用|Tl|(或者|Tu|)表示对应于非空标注l(或者空标注ɛ)的变迁数目,且满足1≤|Tl|≤m,1≤|Tu|≤m。对于一个变迁序列σ=t1t2…tk,其对应的标注序列可定义为w=(σ)≡l(t1)l(t2)…l(tk)。
2 最小初始标识的求取
2.1 问题描述
文献[14]考虑的是仅含有可观测变迁的标注Petri 网,而本文的研究对象是含有不可观测变迁的标注Petri 网,在观察到一个标注后,所有可能的变迁发生序列的数目会呈指数级增长。因此,为了降低计算复杂度,本文进行以下假设:
假设1不可观测变迁组成的子网是无环的。
根据假设1,在标注Petri 网N中,不可观测变迁组成的子网没有直接的循环存在。
假设2对于每个标注的观察,可观测变迁之前至多允许2 个不可观测变迁发生。
根据假设2,在观察到标注lj后,所有可能的变迁发生序列形如σu t,其中t∈To,l(t)=lj,σu∈T*u,σu可能为一个空串ɛ。
考虑一个含有不可观测变迁且初始标识未知的标注Petri 网N=(N,Μ0,L∪{ɛ},l)以及一个标注序列w=l1l2…lk,其中lj∈L,j∈{1,2,…,k},本文的目标为寻找最小初始标识估计,即具有最小托肯总数的标识估计。
定义8[15]考虑一个标注Petri 网N=(N,Μ0,L∪{ɛ},l),给定一个标注序列w,将初始标识估计集合、极小初始标识估计集合、最小初始标识估计集合分别定义为:

假设Μ和Μ΄是2 个分量个数相同的标识向量,其中Μ=[Μ(p1),Μ(p2),…,Μ(pn)]T,Μ΄=[Μ ΄(p1),Μ ΄(p2),…,Μ ΄(pn)]T,如果对任意的i∈{1,2,…,n}满足Μ(pi)≤Μ ΄(pi),则有Μ≤Μ΄成立。假设一个标识集合Z={Μ1,Μ2,…,Μn},若对任意的i,j∈{1,2,3,…}且i≠j,都不存在Μj使得Μj≤Μi成立,则Μi为标识集合Z中的极小标识。由于小于等于关系是一种偏序关系,因此极小标识并不是唯一的。
在文献[15]中,式(4)给出了极小初始标识的计算方法:
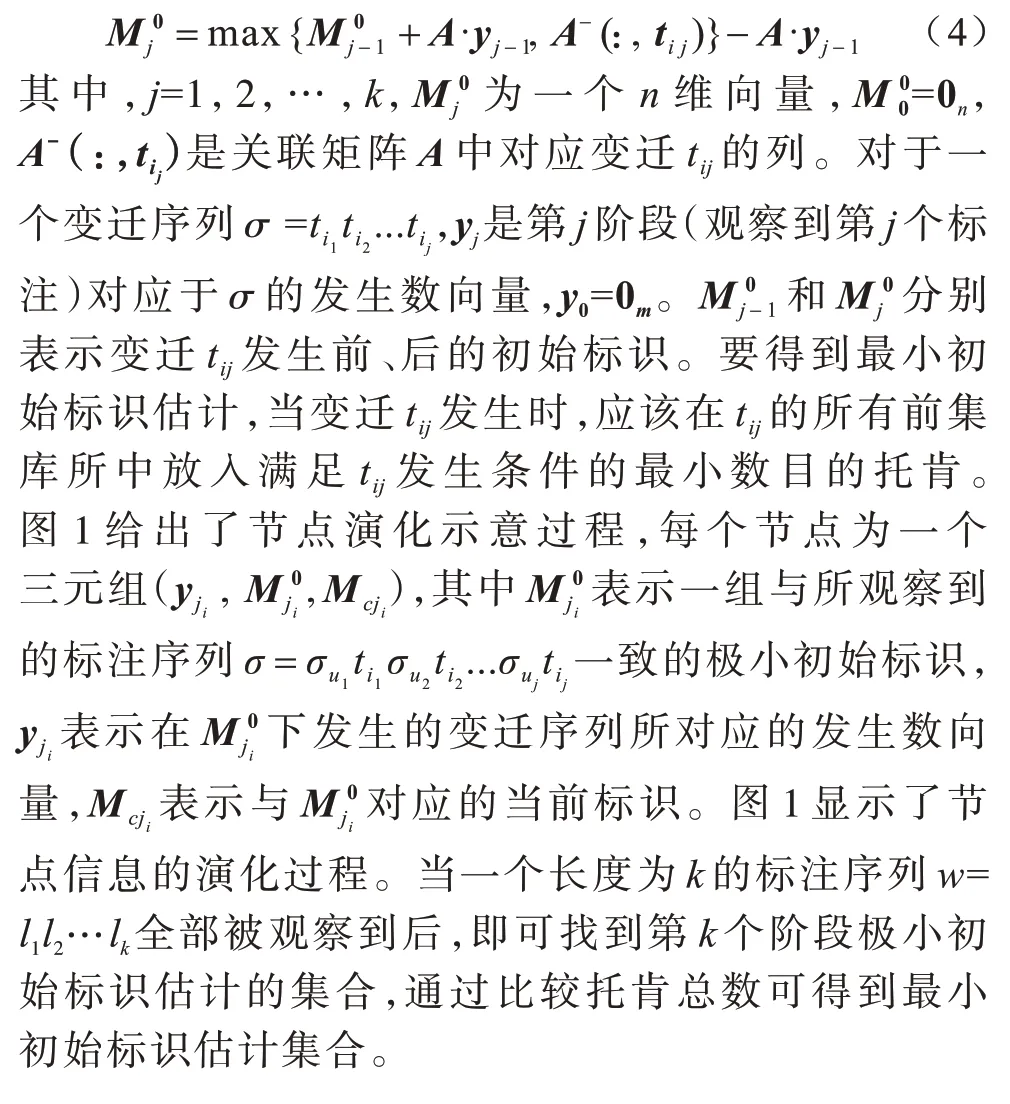

图1 节点演化示意图Fig.1 Schematic diagram of nodes evolution
图2所示为一个标注Petri网(N,Μ0,L∪{ɛ},l),P={p1,p2,p3},T={t1,t2,t3,t4},其中To={t1,t4},Tu={t2,t3},(lt1)=a,(lt4)=b,(lt2)=(lt3)=ɛ。给定一个标注序列w=ab,对w进行观察后,利用式(4)计算极小初始标识估计,得到节点演化示意图如图3 所示,节点信息如表1 所示。观察到标注序列ab后,当变迁序列t1t2t3t4发生时,得到极小初始标识估计集合为(w)={[0000]T},最小初始标识估计集合为I(w)={[0000]T},I(w)对应的变迁序列集合为{t1t2t3t4},I(w)对应的发生数向量集合为{[1111]T}。

图2 标注Petri 网示意图Fig.2 Schematic diagram of labeled Petri nets

图3 Petri 网的节点演化示意图Fig.3 Schematic diagram of node evolution of Petri nets

表1 图3 中每个节点对应的信息Table 1 Corresponding information of each node in Fig.3
2.2 最小初始标识算法估计

算法1最小初始标识估计算法

2.3 复杂性分析
由文献[14]可知,第j阶段的发生数向量的数目为nj=O(jb),b是一个依赖于Petri 网结构的参数。给定一个含有n个库所、m个变迁的标注Petri 网,其中可观测变迁和不可观测变迁的个数分别为mo和mu,且有m=mo+mu成立。在观察到一个标注后,所有可能不同的不可观测发生数向量的数目为:

综合考虑可观测变迁和不可观测变迁,基于假设2,可知第j阶段发生数向量的数目为nj=(r∙j)b。在第j−1 阶段,一个发生数向量至多能产生r∙m0个不同的发生数向量,因此第j阶段新产生的发生数向量的总数为r∙m0∙nj−1=O[r∙m0∙(r∙j)b]。在Petri 网中仅含有可观测变迁的情况下,第j阶段极小初始标识的数目为qj=O(jn),根据假设2,发生序列长度的最大值为3j,因此qj=O((3j)n)=O(jn)。针对每个发生数向量,需要进行nj次比较以确定其是否已经出现在节点Rj中,若已出现过,则需要qj次比较来确定极小的初始标识估计。基于以上分析,算法1 的计算复杂度为:

式(6)可简化为:

因此,算法1 的计算复杂度是关于k的多项式。
3 应用实例
本节通过一个实例来验证算法1 的有效性,并将运行结果与现有算法得到的结果进行对比分析。图4给出了一个2台并行机器的标注Petri网模型N=(N,Μ0,L∪{ɛ},l),库所集P={p1,p2,p3,p4},变迁集T={t1,t2,t3,t4,t5,t6},其中To={t1,t2,t5,t6},Tu={t3,t4},l(t1)=a,l(t2)=b,l(t5)=c,l(t6)=d,l(t3)=l(t4)=ɛ。p1为存放工件的资源库所,变迁t1和t2表示由机器人分别将工件装载至1 号机器和2 号机器上,p2表示工件被1 号机器加工,t3表示机器人将一部分工件从1 号机器上卸载并装载至2 号机器上,p3表示工件被2 号机器加工,t5表示机器人将剩余的工件从1 号机器上卸载,t4表示机器人将工件从2 号机器上卸载,p4表示将来自1 号机器和2 号机器的工件进行再加工,t6表示将工件卸载。给定一个标注序列w=ad,运行算法1 后得到节点演化示意过程如图5 所示,节点信息和弧上的标记信息分别如表2和表3所示。如图5 所示,当观察到标注a时,所有可能的变迁序列集合为{t1,t3t1,t4t1,t3t4t1,t4t3t1,t3t3t1,t4t4t1},应该存在7个节点,但变迁序列t3t4t1和t4t3t1对应的发生数向量均为[101100]T,两者对应的极小初始标识估计分别为[1100]T和[1110]T,显然[1100]T≤[1110]T,根据算法1,当出现相同的发生数向量时,仅保留极小初始标识估计,因此删掉变迁序列t4t3t1对应的初始标识估计及当前标识。当标注序列w=ad全部被观察到后,得到极小初始标识估计集合为(w)={[1000]T},最小初始标识估计集合为Ι(w)={[1000]T},与Ι(w)对应的变迁序列集合为{t1t3t4t6},与Ι(w)对应的发生数向量集合为{[101101]T}。
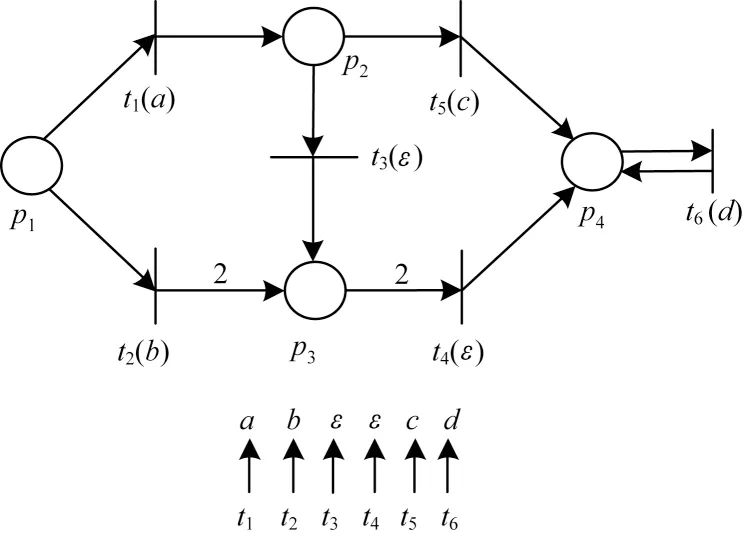
图4 标注Petri 网系统示意图Fig.4 Schematic diagram of labeled Petri net system
文献[15]中限定可观测变迁发生之前至多允许一个不可观测变迁发生,则最小初始标识估计集合为Ι΄(w)={[1001]T},发生数向量集合为{[100001]T,[101001]T},变迁序列为{t1t6,t1t3t6}。假设Μ∈Ι(w),Μ΄∈Ι΄(w),则||Μ||=1,||Μ΄||=2,由此可知||Μ||<||Μ΄||,因此,应用本文方法得到的最小初始标识具有更小的托肯总数,即系统完成指定的任务序列所需的初始资源更少。

图5 运行算法1 后的节点演化示意图Fig.5 Schematic diagram of node evolution after running algorithm 1
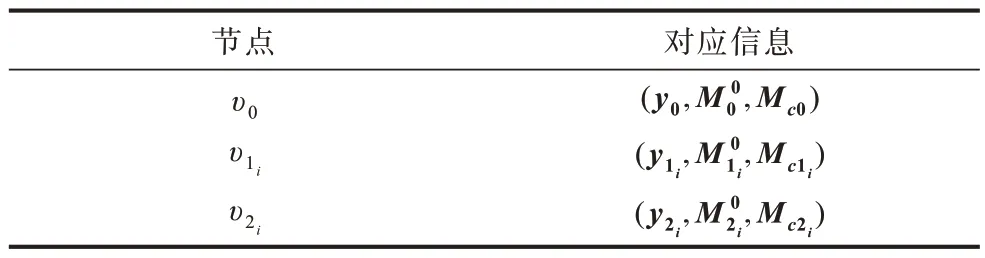
表2 图5 中每个节点对应的信息Table 2 Corresponding information of each node in Fig.5
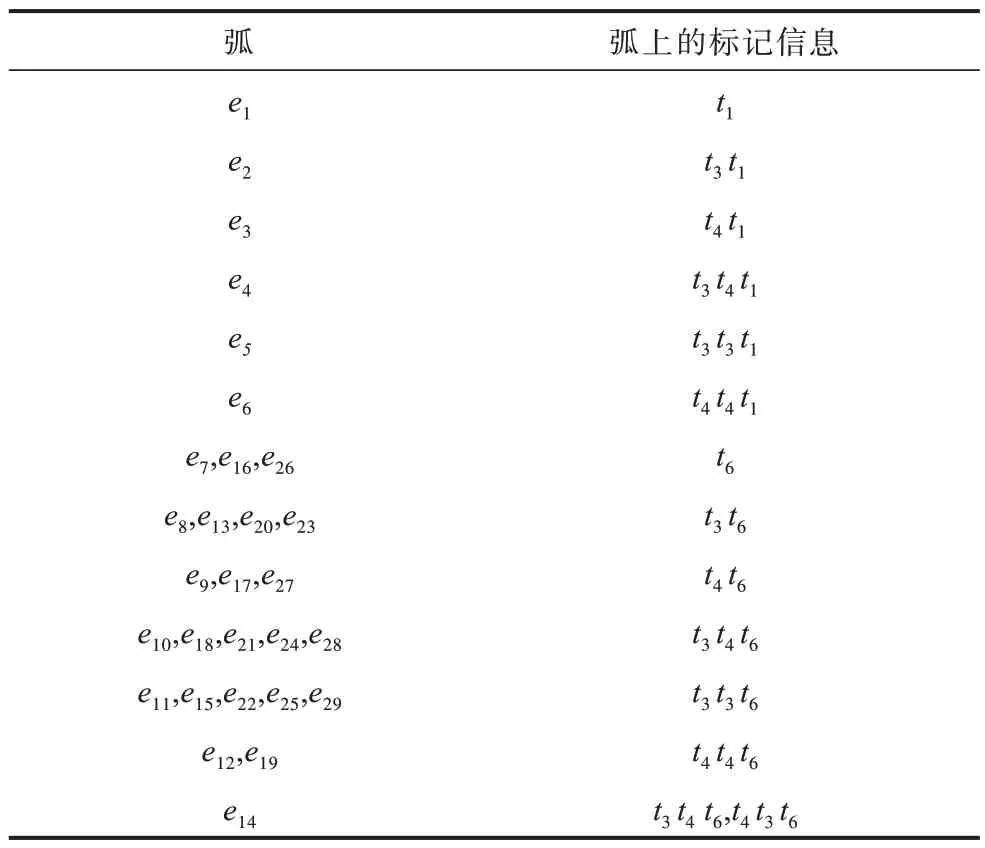
表3 图5 中每条弧上的标记信息Table 3 Marking information of each arc in Fig.5
4 结束语
针对制造系统中的最小资源问题,本文建立标注Petri 网模型,并提出一种用于估计最小初始标识的算法。该算法放宽了不可观测变迁发生个数的限制,并规定可观测变迁之前至多允许2 个不可观测变迁发生,以有效避免最小初始标识估计的穷举计算。实验结果表明,在含有不可观测变迁的标注Petri 网中,应用本文算法估计的最小初始标识较现有算法得到的结果更优。下一步将利用时延Petri 网结构对本文算法进行优化,使得初始标识估计的托肯总数更小。
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28 07:02:46
电子器件(2021年1期)2021-03-23 09:24:02
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19 08:28:36
中国粮食经济(2018年12期)2018-12-30 08:25:42
中国粮食经济(2018年10期)2018-12-30 06:32:16
中国粮食经济(2018年11期)2018-12-27 08:58:42
人大建设(2017年6期)2017-09-26 11:50:43
高中生学习·高三版(2016年9期)2016-05-14 09:12:05
新高考·高二数学(2015年11期)2015-12-23 18:17:44
华侨大学学报(自然科学版)(2014年4期)2014-10-11 06:23:42