无人机航测技术在基础地图测绘中的应用
2021-04-29 01:02:26黎广易志朝
江西测绘 2021年1期
黎广 易志朝
(江西省水利规划设计研究院 江西南昌330029)
1 引言
无人机摄影测量、遥感等新型技术在地理信息、灾害监测、勘察测绘等相关行业的应用越来越广泛[1-4]。在工程测量中,开展地图测绘工作时,利用无人机航测技术能克服传统测绘中地形、天气、人为等因素的影响[5]。降低测量误差,提高测绘准确率和工作效率,如在矿山、铁路、山区等复杂地形中的应用[6-8]。目前航空摄影技术在地图测绘中的应用逐渐深入,所以在实际项目开展过程中,需要测量人员具备专业的测量技术,对信息和数据进行计算和处理,保障所获取的数据能够将测区信息全部展现,降低环境因素对数据获取过程产生的影响,确保技术应用的合理性和科学性。本文以大岗山水库工程项目为例,介绍了无人机航测的实现过程,对处理结果进行了展示,并对测量精度进行了评价。
2 项目简介与航线设计
2.1 项目测区概况
大岗山水库是一座以饮水为主的水利工程,位于袁河支流松山河中上游,地处分宜县钤山镇砻里村。根据项目要求划定测区范围,测区面积约8km2,测区地势较为平坦,主要地物有:居民地、公路、池塘、耕地和植被等,项目要求生产测区内全要素的1:2000 地形图,平面坐标系为CGCS2000,高程系统为1985 国家高程基准,测区范围如图1 所示。
2.2 航线设计

图1 测区范围示意图
本项目载飞平台为大黄蜂四旋翼无人机,是一款高档无人机系统设备,能自动初始化,自动飞航线,轻小便捷,飞机雷达一体设计,单架次续航时间长。采用华测导航的AS900HL 低空激光扫描测图系统,是一款基于轻型无人机的记载LiDAR 系统,将激光扫描系统、相机系统、定向定位系统以及控制单元有效集成,整体发射频率高达55 万点/秒,330°的超高视场角,测距精度为10mm,广泛应用于基础测绘、应急保障、灾害监测等领域。为了使单张航拍图覆盖的范围更宽,成像效果更好,提高航测工作效率,搭载索尼SonyA7R 相机,像幅为7360×4912 像素,像素点为4.88μm,CCD 大小为35.9×24 mm,焦距为35.77607mm。根据项目成图要求及测区地形状况,当获取影像数据时,将测区分成2 个航摄分区;当获取点云数据时,将测区按照不同比例尺大小划分为15 个小测区,每个测区一个架次,每个架次飞行时间约为1h。在各个测区内,高差尽量控制在50m 内,以保证测区内的最高点和最低点都有点云数据。具体各个测区航摄因子见下表1。

表1 航设因子主要设计参数
3 点位布设与量测
本项目像控点与检查点均布设为平高点,共测量137 个点。像控点是航测控制加密和测图的基础,像控点选取的好坏和点位精度直接影响成果的精度,检查像控点测量高程精度和平面精度均在0.1m以内。每个区域像控点分布均匀,并保证像控点布设在航向及旁向六片或五片重叠范围内。像控点在测区内的分布如下图2 所示。

图2 测区内像控点分布示意图
检查点用于检查点云和影像数据处理的平面精度和高程精度,检查点布设原则上要均匀分布覆盖测区,可选取地面易于区分的地面点,如路口、房角等,由于每个测区飞行的质量导致数据处理的精度不同,不同的测区根据实际情况选点。根据规范像控点和检查点均可通过千寻信号采用GPS RTK 来进行量测[9-10],千寻位置服务能提供高达动态厘米级和静态毫米级的定位精度,坐标基准为CGCS2000。在实际量测中,采用南方银河1 智能RTK 测量系统,静态标称精度为±(2.5mm+1mm/km×D),D 为量测点距离。动态RTK 精度为±(8mm+1mm/km×D),D 为量测点距离。每个点平滑采集3 次后取均值将量测的大地高程通过JXCORS 中心解算换算成1985 高程。
4 航摄数据采集与处理
选择合适的天气,在指定测区根据航线设计完成无人机航摄作业。航摄飞行结束后,对获取的惯导数据、激光数据和影像数据等航摄数据进行整理并对数据进行检查:
(1)检查点云和影像数据覆盖完整性,无数据漏洞、航带遗失等情况;
(2)检查点云密度、影像质量等数据情况;
(3)导航数据检查检验指标:导航数据完整、正确,精度满足规范要求。
4.1 POS 解算与检查
导航数据利用PPK 技术进行差分解算,获取高精度的影响POS 数据,利用基准站与流动站GPS 接收机在航飞时对卫星进行同步观测,得到虚拟的载波相位观测值,确定流动站的相对位置,再由基准站已知坐标,获取影像的POS 数据。POS 数据检查主要有无人机姿态曲线与POS 数据质量,如下图3、图4所示,其中评估值(Q 值)为1。

图3 航飞无人机姿态曲线图

图4 部分数据的差分解算Q 值
4.2 空中三角测量
空中三角测量是数字摄影测量生产作业的关键工序,是内业处理的核心,本项目采用INPHO 软件进行空三加密工作。根据航摄实际情况划分2 个区域,利用软件全自动提取航带内和航带间连接点,完成影像相对定向与模型连接,用自动提取的连接点,进行像方自由网平差,当影像标准点位缺少连接点的影像以及模型连接较差的区域,采用手工添加连接点方式进行连接。再用外业实测像控点进行空三绝对定向工作,在测区内添加控制点后,点击软件的平差工具进行区域网平差,经过多次平差计算、剔除或改正粗差点的点位等工作后,空三精度满足项目要求。模型连接示意图如下图5 所示。

图5 模型连接示意图
4.3 点云数据处理
本项目中激光雷达点云解算使用Copre 软件,选择好解算轨迹,设置好解算距离,对点云进行解算。进行点云分类前,准备好实测检查点信息与坐标转换参数,用Terrasolid 软件将点云数据由WGS84坐标系转至CGCS2000 坐标系。在Terrasolid 中设置好噪声点滤波参数和点云自动分类,将所有分类出的地面点建立TIN,对高程突变的区域,调整参数重新进行小面积的自动分类。对自动分类不理想的区域,可结合正射影像采用人工手动拉取断面的方法,进行手动编辑分类。人工分类前后对比效果见图6所示。
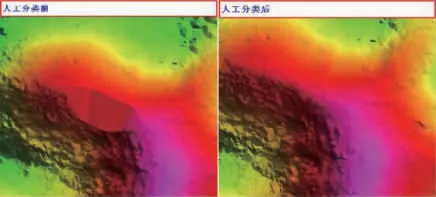
图6 人工分类前后对比效果
4.4 数字正射影响DOM
利用空三加密后成果、畸变后影像和点云生成的DEM 数据,对数字航空影像进行单片正射纠正;依次完成测区范围内所有航片的正射纠正,生产每张航片的正射影像数据。再对单片影像进行镶嵌与匀色,拼接时避免了拼接线出现在房屋、立交桥、陡坎等地形有高差的区域,保证了地物完整性,镶嵌后的影像无明显拼接痕迹,过渡自然,纹理清晰。拼接同时对整个测区影像进行整体匀色,保证了区域整体影像色彩的平衡,亮度和对比度适中。最终DOM成果见图7 所示。

图7 DOM 成果示意图
5 成果精度检测
点云高程精度是利用外业实测检查点进行检查,利用检查点周边一定范围内的机载LiDAR 地面点云构建不规则三角网,计算检查点所在平面位置的点云高程值,然后以该内插高程值与外业实测检查点高程值进行比较,计算出点云高程中误差。空三精度加密点平面位置中误差,点云高程中误差按如下公式(1)进行计算。

其中mj 为检查点的中误差,Δj为检查点野外实测与量测值的差值,n 为检查点总数。本项目共检查137 个高程点,最大较差为0.296m,最小较差为0.05m,均误差为0.039m,由公式得点云高程中误差为0.092m,表2 表示部分检查点的高程较差数据。空三加密点共校验30 个点,由公式可计算得平面中误差为0.017m,最小平面误差为0.0517m,均方误差为0.2167m,基本定向点残差X 为0.052m,Y 为0.035m。表2 和表3 表示部分检查点误差统计表,其中数据的获取、处理、计算结果以及精度评定符合规范以及设计要求[11]。

表2 检查点高程较差统计表 单位(m)

表3 检查点误差统计表 单位(m)
6 结束语
本文通过新余大岗山水库1:2000 地形图航测的工程实践,介绍了无人机航测技术的作业流程以及内外业处理结果展示,结果表明,无人机航测技术不仅可以满足相关规范和实际工程项目设计需求,能有效提高大比例尺测图效率,大量节省人力成本,在水利工程行业具有广阔的应用前景,为测绘从业者提供相关建议和参考,提高生产效率。虽然无人机航测技术的优势明显,能为工程项目的各个基础建设工作提供高效的技术支持,但在实际应用也存在诸多问题,无人机影像畸变大,姿态稳定性差,高程精度较低,对植被丰富的区域,像控点工作量大等问题仍需进一步深入研究和解决。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
计算机系统应用(2022年4期)2022-05-10 08:41:10
天津医科大学学报(2021年4期)2021-08-21 02:14:52
河北地质(2021年4期)2021-03-08 01:59:14
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
中国铁道科学(2019年5期)2019-10-19 07:55:14
国际呼吸杂志(2019年4期)2019-03-12 01:08:18
测绘通报(2018年10期)2018-11-02 10:07:28