
基于ADAS 联网时空数据的路段交通参数估算模型*
2021-04-29 13:31马天奕文家强王丽园吕能超王玉刚
交通信息与安全 2021年1期
马天奕 文家强 王丽园 吕能超▲ 王玉刚
(1.中交第二公路勘察设计研究院有限公司 武汉430056;2.武汉理工大学智能交通系统研究中心 武汉430063;3.武汉理工大学水路公路交通安全控制与装备教育部工程研究中心 武汉430063)
0 引 言
道路交通流参数观测与估计是交通系统规划、管理和控制的重要内容。通常而言,交通流参数包括流量、密度和速度[1],其观测信息是道路路网实施合理交通控制与采取有效管理措施的前提条件,对缓解道路交通拥堵状态、提高路网运行效率和提升路段行车安全水平具有重要作用[2]。因此,国内外许多学者已经对道路交通运行状态估计进行了大量的研究[3],其核心问题在于如何精准、高效地获取特定区域内的时空交通流参数。
交通状态估计(traffic state estimation,TSE)是当前获取交通量信息的主要手段,其目的在于再现区域路段的交通状况[4],本质上是利用现有的观测数据或者交通数据以及先验知识对路段流量、密度和速度等变量进行推理估计的过程[5]。根据用于交通状态估计的数据来源,可以将其分为固定数据和移动数据2 种类型。其中,固定数据是指由固定位置的传感器采集得到的信息,而移动数据则是与数据采集车相关的数据,通常可提供沿着数据采集车移动轨迹的测量信息[6]。固定数据采集利用路侧定点观测的方法来实现[7],其采用的典型设备为固定检测器[8],如环形线圈检测器、微波雷达检测器和交通监控摄像机等[9],通过采集较短区域路段内的车辆通行数量、平均车辆长度和瞬时速度等信息[10],以完成断面或路段流量、密度和速度的估算。然而,这种定点观测方法仅能提供设备安装点附近一定空间范围内的详细信息,限制了交通量信息可观测的区域,且忽略了对道路区域特殊点的考虑。由于信息和通信技术的发展,通过带有数据采集设备的探测车或浮动车在移动过程中实时采集如速度、经纬度等交通信息已经得到广泛实践,因而利用移动车辆采集的信息进行交通状态估计成为1 种通用的研究方法[11]。典型的移动数据采集方法是借助车载数据采集设备实现,如车载GPS 和车载自诊断系统(on-board diagnostics,OBD)等。因此,相比固定检测器,这种移动式的探测车可以从更加宽广的时空区域内采集其自身的基本运动信息[12],为连续时空范围内的交通状态估计提供充足的数据支撑。
基于大规模的探测车数据对道路交通状态进行估计得到了深入研究[13-14],尤其是利用不同渠道采集的移动数据对交通状态模型开展了测试与验证[15-16]。Yuan 等[17]构建了1 种基于拉格朗日观测的有效交通状态估计方法,并通过探测车的车载GPS数据对其进行验证。林晓辉等[18]利用车联网数据对交通参数进行估计,并对路网宏观基本图进行估测融合。李晨朋等[19]基于公交车速度构建了交通状态估计模型,实现了对道路交通运行状态的估计。符旭等[20]针对城市快速路,通过GPS速度检测参数构建观测网络,完成了路段的交通密度和边界流量的估计。上述研究都是借助于可采集的移动数据,通过移动车辆自身的速度和经纬度等信息来完成路段交通状态的估计工作,其无法获取周边交通流信息,且前提是需要拥有大量探测车在同一时空区域内的测量数据[21]。当探测车系统的探测车辆数量不足时,其采集的车速和经纬度信息量并不能满足交通状态估计的需求。因此,需要考虑如何利用数量较少的车辆及其有效测量信息实现对路段交通状态的估计[22-23]。
近年来,先进辅助驾驶系统(advanced driver assistance systems,ADAS)已经逐渐在小型汽车及营运车辆上装配,并在驾驶行为监管与干预中得到大量应用[24-25]。ADAS除了驾驶行为应用之外,还可提供大量有价值的感知信息。其感知的信息不同于车载GPS采集的信息,除了传统的移动车辆自身基本运动信息外,还包括扩展浮动车数据[26],即移动车辆与其前方车辆的实时相对位置和相对速度等信息。相比于普通的GPS探测车辆,ADAS车辆能够以单个车辆获取其周围的多个移动目标的信息,扩大了其在道路交通系统中可感知的信息类别和空间范围,这为区域路段交通状态估计提供了新的思路和数据来源。基于此,本文建立1 种基于ADAS 联网数据的路段交通参数估算模型,利用部分ADAS车辆在道路交通流中感知的信息,完成对该道路路段连续时空范围内流量、密度和速度等参数的估计。
1 车载感知信息与交通参数关系
1.1 车载ADAS感知信息特征分析
车载ADAS 借助于传感设备,可以准确实时获取丰富的行车信息,进一步增强了车辆系统的信息感知能力[27]。其中,获取的车辆自身信息包括车辆位置、车辆速度以及车辆加速度等;获取的前方目标信息包括目标车辆相对位置和相对速度。在车辆行驶过程中,车载ADAS可以检测同车道和左右相邻车道内的移动目标,以真实采集数据对车载ADAS 检测过程进行可视化,见图1。图中:虚线表示本车所在车道的车道边缘线;实体矩形框为本车,处于坐标原点位置;空心矩形表示所感知的不同车道的前向车辆。

图1 车载ADAS所检测的前方目标示意图Fig.1 Front target detected by the on-board ADAS
1.2 感知信息与交通参数关系分析
利用车载ADAS 前向摄像头或雷达感知的信息,可进一步提取交通流相关的参数,得到本车与邻近前方车辆的车头间距(distance headway,DHW)和车头时距(time headway,THW)参数,二者可以通过式(1)~(2)进行计算。其中,车头间距是指同一车道中,2辆连续行驶的汽车车头之间相隔的距离,可通过ADAS传感器直接获取;车头时距是指本车和同车道前方最邻近车辆前端通过同一断面的时间间隔。研究表明:车头间距和车头时距与交通流密切相关,是反映道路通行能力和服务水平的指标参数[28]。


式中:Dislead为同车道最邻近前方车辆的位置,m;Disfollow为跟随车辆的位置,m;Vfollow为跟随车的车速,m/s。
结合车头间距和车头时距的量纲和基本定义进行分析,见表1。从微观个体的车头间距DHW和车头时距THW到宏观的路段密度K和流量Q,发现DHW与K,THW与Q存在一定的相关关系,见式(3)~(4)。
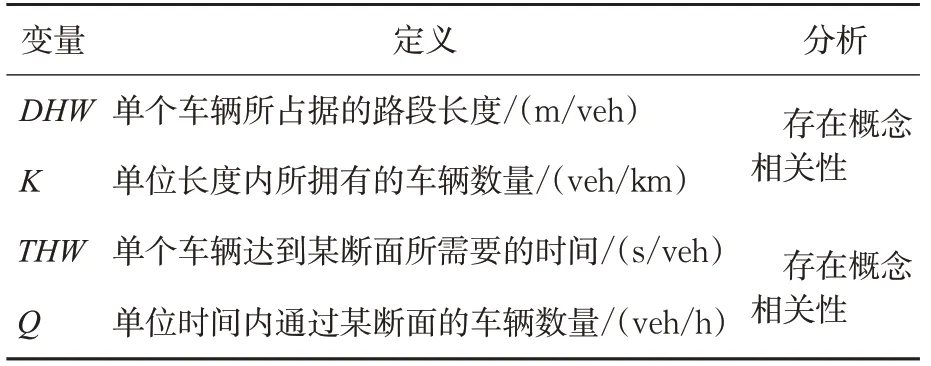
表1 DHW 与K 和THW 与Q 数学概念分析Tab.1 Analysis of mathematical concepts of DHW and K,THW and Q

通过上述分析可知,在获得某路段时空范围内大量的车载ADAS采集的信息后,根据式(1)~(4),可以利用指标DHW与THW对路段交通参数进行探索研究。因此,装备有ADAS 的车辆可以为交通参数估计相关研究提供数据支撑。尤其是,当一定数量的装备有ADAS 的车辆分布在整个交通系统时,其所采集的数据更能反映该路段的时空信息,比装载有GPS的浮动车有更高的感知效率。本文以车载ADAS 采集的信息为基础,通过建立关键指标车载ADAS 感知信息与流量、密度以及速度的关系模型,实现对路段交通参数的估算和验证。
2 基于DHW的时空区域交通参数估算模型
本文以广义交通量定义为基础,结合车载ADAS检测到的关键指标DHW、位置信息和时间戳信息,针对多车道单向交通系统,建立不同时空区域内的路段交通流量、交通密度以及交通速度估算模型。
2.1 广义交通量定义
关于交通量的估算方法,Edie 等[29]提出了广义交通量概念,其核心是通过某时空区域内所有车辆的行驶轨迹来定义时空区域内的交通量(流量、密度和速度),估算方法见式(5)~(7)。

式中:l(A) 为在时空区域A中所有车辆行驶的总距离,veh·km;t(A) 为车辆在时空区域A中行驶所耗费的总时间,veh·h;|SA|为时空区域A的时空面积,km·h。
通过上述广义交通量定义可知,获取时空区域A中每一车辆的行驶轨迹信息对计算该区域的交通量至关重要。在现实交通环境下,由于固定时空区域内所有通行车辆的行驶轨迹信息获取技术较为困难且成本较高,故而使用部分车载ADAS 采集的信息替代所有车辆的行驶轨迹信息进行交通量估算成为1种可接受的思路[8]。但是,已有相关研究显示只有在稳态条件下,即交通条件在空间和时间上没有变化的情况下,该估计才能很好地反映路段上的交通状态,所以需要进一步考虑多车道等复杂交通场景下的交通状态估计的研究。
2.2 交通量估算模型
选取装备有ADAS 的车辆作为数据采集车辆,利用车载ADAS 采集的基本信息为依据,并结合车辆的换道、变速等驾驶特性,以广义交通量定义为基础,建立路段流量、密度及速度估算模型。同时区别于已有的单车道应用场景[4-5,8],本文基于多车道的非稳态交通条件进行建模。
针对存在ADAS车辆与普通车辆混行的多车道交通环境,由于无法获取时空区域内所有车辆的轨迹信息,利用全体ADAS 车辆在移动过程中的实时探测信息,构建其在连续时空区域内的动态轨迹。通过提取ADAS车辆在驶入、驶出时空区域的临界点信息,以及ADAS 车辆与邻近前车的实时相对位置信息,并考虑时空分辨率因素的影响,建立基于划分时空区域的流量、密度和速度估算公式,见式(8)~(10)。
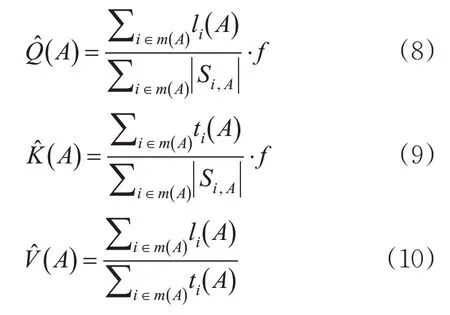
式中:li(A) 为ADAS车辆i在时空区域A中的行驶距离,veh·km;ti(A) 为ADAS 车辆i在时空区域A中行驶所耗费的时间,veh·h;|Si,A|为时空区域A中ADAS 车辆i与同车道最邻近前车的时空面积,km·h;m(A) 为时空区域A中ADAS 车辆的集合。f为修正系数,与时空区域A的时间分辨率、空间分辨率参数设置相关。
通过对式(8)~(10)中的关键变量的定义进行分析,利用ADAS 车辆i在时空区域A中的轨迹起点和轨迹终点信息求解li(A) 和ti(A) ,利用ADAS车辆i在时空区域A中的完整轨迹信息求解|Si,A|。关于li(A) ,ti(A) 这2个关键变量的计算方法见式(11)~(12)。

式中:(xi,1,yi,1) 和(xi,0,yi,0)分别为ADAS车辆i离开和进入时空区域A时的坐标位置;ti,1和ti,0分别为ADAS车辆i离开和进入时空区域A时的时刻。
考虑到多车道的道路交通环境下,车辆存在换道、紧急加减速等驾驶行为,ADAS车辆及其前方最邻近车辆在不断运动变化。相比单车道交通条件,多车道交通条件下时空面积变量具有更复杂的变化特性,以图2为例进行说明。

图2 不同交通条件下的车辆状态变化Fig.2 Changes of the vehicle status in different traffic conditions
在单车道稳态交通下,若不考虑车辆驶出当前道路,随着时序状态更替,ADAS 车辆P0不会发生换道行为,且邻近前车P1也不会改变;在多车道非稳态交通下,随着时序状态更替,ADAS 车辆P0会进行换道,并且邻近前车可能由P2变为P3。因此,对于关键变量|Si,A|的计算需要注意:①当前ADAS车辆i所处的车道;②当前ADAS车辆i的最邻近前车;③ADAS 车辆i和最邻近前车出入时空区域A的关键点信息。见图3,以选定的时间间隔和空间间隔划分时空区域,时空区域A的时间范围和空间范围分别为[ΔT,2ΔT]和[ΔD,2ΔD] ,以时空区域A为例对多车道非稳态交通条件下的时空面积计算进行说明。阴影部分即为时空面积|Si,A|,其几何意义可表示为ADAS 车辆i与最邻近前车的时空面积和时空区域A的交集;TrA为ADAS车辆i在时空区域A中的行驶轨迹;Tr1和Tr2为ADAS车辆i在行驶过程中的前方车辆行驶轨迹;ta,tb和tc均为关键时刻点信息;ΔD和ΔT为时空区域A的空间分辨率和时间分辨率。可知,ADAS 车辆i与最邻近前车的行驶轨迹对时空面积|Si,A|的数值大小具有直接影响。结合上述分析可知,|Si,A|计算方法见式(13)~(14)。
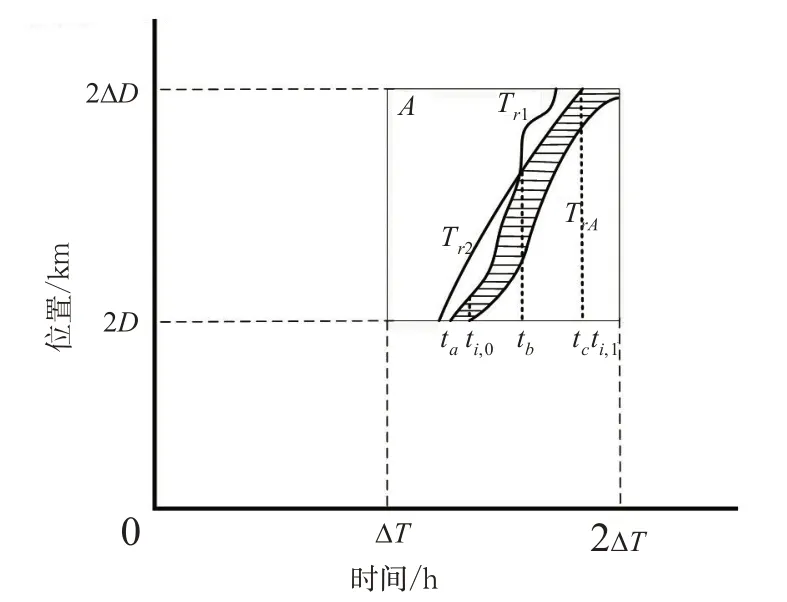
图3 车辆行驶轨迹与时空面积|Si,A |的示意图Fig.3 Vehicle trajectory and time-space area|Si,A|

式中:flead(t)为ADAS 车辆i的最邻近前方车辆在时空区域A的行驶轨迹函数;ffollow(t)为ADAS 车辆i在时空区域A的行驶轨迹函数;fL,1(t)和fL,2(t)为最邻近前方车辆的阶段轨迹函数;fF(t)为ADAS车辆i的阶段轨迹函数。利用极限思想可以得到|Si,A|,计算公式见式(15)。
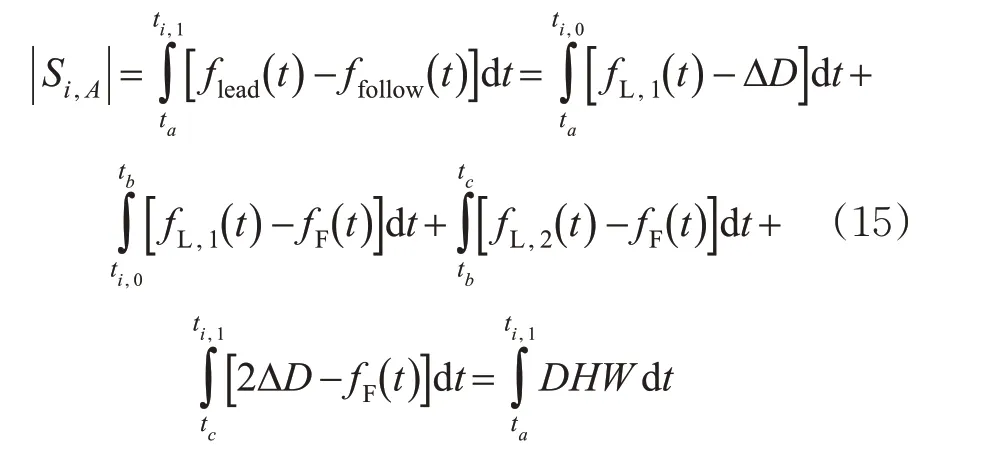
通过以上分析,利用式(11)~(15)代入式(8)~(10),可以估算出多车道道路条件下所设定时空区域内的流量、密度和速度参数。
3 仿真实验和验证数据提取
为了验证所提交通参数估算方法的效果,需要采集道路交通系统一定时空范围内的数据对其进行验证,获取数据需要满足条件:①一定数量的ADAS车辆作为数据采集车随机分布在道路交通系统中;②ADAS车辆可以检测其前方150 m范围内的移动车辆;③ADAS 车辆的驾驶行为与其他普通车辆没有区别。由于现阶段真实道路交通环境中布设大量ADAS 车辆开展实验较为困难,本研究通过Vissim仿真实验获取相应数据。
3.1 实验设计和数据采集
利用Vissim 软件完成道路交通场景建模和交通流建模,本研究所设道路场景为3 车道单向交通路段,道路几何结构均匀,总长度为4 km,见图4。
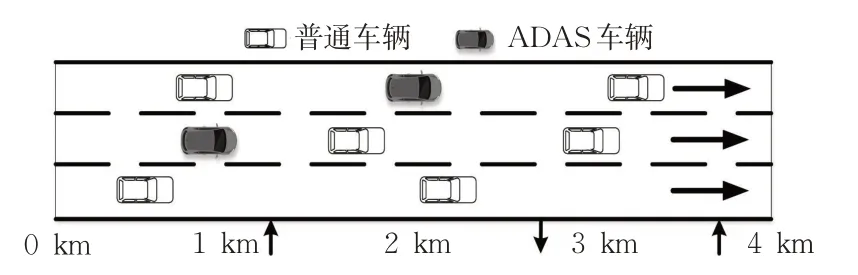
图4 实验场景示意图Fig.4 Experiment scene
为了获得较为丰富变化交通状态下的交通流数据,在1.2 km 和3.7 km 处设有入口匝道(向上箭头表示),在2.7 km处设有出口匝道(向下箭头表示),向上或向下箭头仅表示入口或出口位置,无其他含义。其中,大型车辆和小型车辆布设比例为10%,90%,预期速度分布为60 km/h和80 km/h,场景中不考虑其他道路使用者。仿真时长按60 min 计,按每20 min 设定可变交通流分别为1 200,1 800 和1 500 veh/h。针对0~4 km 路段,根据车道按序每隔500 m 位置添加虚拟交通检测器,用以记录通过断面的交通流信息。
实验中,作为数据采集车辆,ADAS车辆是从所有车辆中随机抽选,其与普通车辆不存在驾驶行为差异,仅以ADAS 车辆及其邻近前方车辆的信息作为ADAS车辆所检测到的信息。
3.2 数据处理
实验采集的数据分为2 类:①仿真时长内车流的全局运动信息,可用于提取ADAS 车辆可检测的信息;②仿真时长内检测器记录的所有信息,可用于统计路段的交通量信息。第①类作为验证交通参数估算模型的数据来源。第②类作为真实观测的数据,其目的是与估算模型的输出结果进行对比。关于仿真实验采集数据的处理和运用流程见图5。其中,ADAS检测的信息分为2个部分,一部分用来对交通参数估算模型中的修正系数f进行标定,另一部分用来对标定后的交通参数估算模型进行验证。

图5 数据处理和运用流程Fig.5 Data processing and application process
时空分辨率的设置直接影响检测器统计的交通量信息和交通参数模型的估算结果。根据图3可知,空间分辨率步长为ΔD,时间分辨率步长为ΔT,通过调整步长的数值大小,可以得到仿真道路交通下连续的时空区域,从而对固定时空区域内的交通量进行统计和估算。针对本仿真实验的要求,道路路段长度为4 km,仿真时长为1 h,则时空分辨率需要满足

结合已有研究[4,23],考虑到道路检测器的布设间距等因素,本文拟通过设置不通的时空分辨率来研究交通参数估算模型的效果,见表2。设置3种时间分辨率和2种空间分辨率,一共对6种时空区域划分规则下的交通参数估算模型进行验证。同时,设定3%,5%,7%,10%和15%这5 组ADAS 车辆渗透率,用于探究不同的ADAS车辆比例对交通参数估算模型的影响。

表2 时空分辨率组别设定Tab.2 Time-space resolution group setting
3.3 修正系数标定方法
由于考虑到多车道道路交通条件下车辆的换道和非均匀变速特性,并且所建的交通流量、密度和速度估算公式与时空分辨率密切相关,在其中引入了修正系数f,见式(8)~(9)。因此,在对交通参数估算模型进行验证前,需要对不同时空分辨率下的修正系数f进行标定。
基于不同的时空分辨率,利用来源于ADAS 检测信息的定参数据集和来源于检测器记录信息的对比数据集对交通参数估算模型的修正系数f进行标定。其标定步骤为:①利用定参数据集提取ADAS车辆在时空区域A中出入点的时间、位置信息以及实时DHW值,完成li(A) ,ti(A) 和|Si,A|等关键量的计算;②根据对比数据集统计相应时空分辨率下的Q(A) ,K(A) 和V(A) 的观测值;③基于交通参数估算式(8)~(9),计算得到连续时空范围内(1 h×4 km)修正系数f的时空矩阵,选择最佳修正系数f。
选取5 min×500 m 的时空分辨率为例,得到修正系数f的时空矩阵(8 行×12 列)。通过统计修正系数f的取值情况,可以得到f不同取值及其相应频次,见图6。基于修正系数f的取值情况,计算得到f不同取值下的正态分布值,拟合得到的f分布曲线接近正态分布,见图7。根据f的取值特点,按照式(17)~(18)求取最佳f取值。式(17)中的Y(f)min为目标函数,保证f取某一值下的估算误差最小,式(18)为约束条件。求取目标函数所对应的f值即可完成参数f的标定。

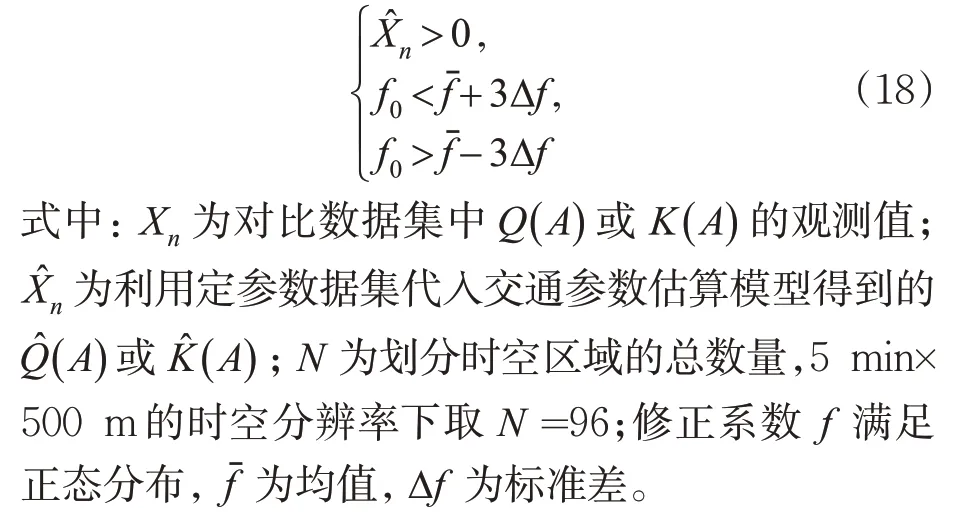

图6 修正系数f 值的统计Fig.6 Statistics of correction coefficient f value

图7 修正系数f 值的正态分布曲线Fig.7 Normal distribution curve of correction coefficient f value
基于上述的修正系数f的标定过程,利用式(17)~(18)对不同时空分辨率下的修正系数f进行计算和标定,其结果见表3。

表3 不同时空分辨率下的修正系数fTab.3 Correction coefficient f under different time-space resolutions
4 结果分析
4.1 交通参数可视化时空分布
为了验证交通参数估算模型的效果,通过计算不同时间分辨率、空间分辨率和ADAS 车辆渗透率下流量、密度和速度的估算性能,并将其与检测器记录信息统计的流量、密度和速度参数进行对比分析。以5 min×500 m 时空分辨率为例,作为数据采集车的ADAS 车辆渗透率为10%,得到交通参数估算值和观测值的可视化时空分布图,见图8。
从图8 可知,通过察看交通参数估算模型得到的流量(见图8(a))、密度(见图8(c))和速度(见图8(e))与交通检测器记录的流量(见图8(b))、密度(见图8(d))和速度(见图8(f))在各个划分时空区域的分布情况,发现速度估算的整体效果要优于流量估算和密度估算的效果,可能是由于速度估算式(10)不受ADAS 车辆与其最邻近前车时空面积|Si,A|的影响,且多车道道路条件、车辆的换道和变速特性对整个时空区域内的区间速度影响几乎可以忽略;但估算的流量、密度和速度相比于检测器观测的流量、密度和速度存在一些明显的异常数据,这可能与出入口匝道扰动了局部区域的交通流相关,且可能受存在ADAS车辆驶出交叉口情况的影响。

图8 估算交通参数和观测交通参数的时空分布图Fig.8 Time-space distribution of estimated traffic parameters and observed traffic parameters
4.2 交通参数估算模型精度分析
4.2.1 交通参数估算精度统计结果
为了量化分析不同时空分辨率和不同渗透率下交通参数估算模型的效果,选取均方根百分比误差(root mean square percentage error,RMSPE)和均等系数(equal coefficient,EC)作为交通参数估算模型的统计指标。其中均方根百分比误差(RMSPE)对数据集中的大误差较为敏感,可以用来评价基于模型估算的交通参数时空矩阵的精度;均等系数(EC)主要从拟合程度方面反映交通参数估算模型的结果与交通检测器观测交通参数之间的接近程度。指标RMSPE和EC的计算公式见式(19)~(20)。


式中:Pm和分别为检测器观测的和模型估算的交通参数(流量、密度或速度之一);M为对应的交通参数时空矩阵所包含的元素的总数量。
利用上述选取的统计指标,分别对5 min×500 m,5 min×1 000 m,10 min×500 m,10 min×1 000 m,15 min×500 m 和15 min×1 000 m 这6 组时空分辨率进行考虑,在此基础上针对每组时空分辨率,分别统计计算3%,5%,7%,10%和15%这5种ADAS车辆渗透率设置下的模型估算交通参数相比检测器观测交通参数的精度,见表4。同时,为了研究时空分辨率和ADAS车辆渗透率与交通参数估算模型精度的关系,得到了流量、密度和速度的RMSPE值和EC值变化趋势图,见图9~11。

表4 不同条件下的交通量估计比较Tab.4 Comparison of traffic-parameter estimation under different conditions

图9 流量估算效果比较Fig.9 Comparison of flow estimation performance

图10 密度估算效果比较Fig.10 Comparison of density estimation performance
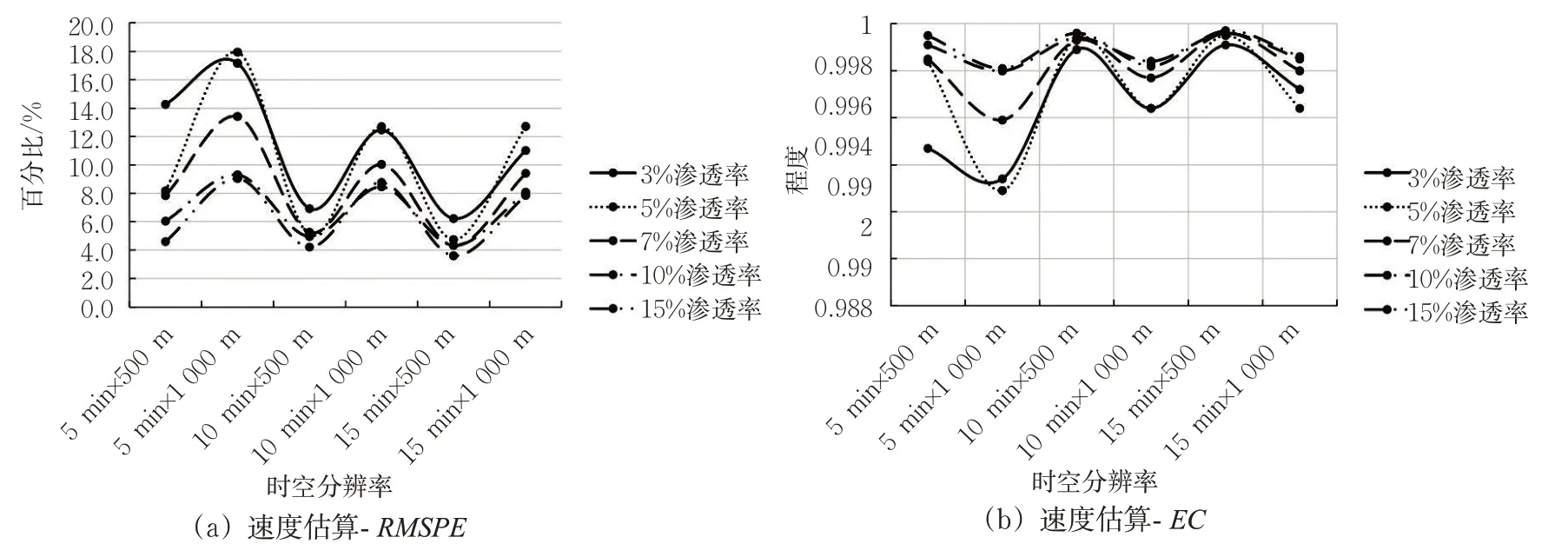
图11 速度估算效果比较Fig.11 Comparison of speed estimation performance
4.2.2 交通参数估算精度影响因素分析
1)时间分辨率和空间分辨率对交通参数估计精度的影响。考虑时间分辨率对交通参数估算模型精度的影响。通过5 min(10 min和15 min)×500 m和5 min(10 min和15 min)×1 000 m这2类数据比较发现:针对固定的ADAS车辆渗透率,随着时间分辨率的降低,其估算流量、估算密度和估算速度的均方根百分比误差明显减小,且估算流量、估算密度和估算速度同检测器相应观测数据的平均拟合程度呈上升趋势,这符合预期认知规律,也与之前研究规律一致[8,30]。基于实验结果数据统计,当时间分辨率降低5 min,估算交通参数均方根百分比误差平均减小3.40%。因此,一定程度上降低时间分辨率对提升交通参数估算模型的精度具有积极作用。
考虑空间分辨率对交通参数估算模型精度的影响。基于5 min×500 m(1 000 m)、10 min×500 m(1 000 m)和15 min×500 m(1 000 m)这3 类数据进行比较,发现在ADAS车辆渗透率不变时,随着空间分辨率的降低,其估算流量和估算密度的均方根百分比误差总体上呈现减小趋势,但是估算流量和估算密度同检测器相应观测数据的平均拟合程度无明显变化;其估算速度的均方根百分比误差明显增大,估算速度同检测器观测速度的平均拟合程度却明显减小。初步考虑,估算速度精度降低可能与流量-密度-速度3 个参数的数学关系相关。基于实验结果数据统计,不考虑异常实验数据的情况下,当空间分辨率降低500 m,估算流量和密度均方根百分比误差平均减小1.68%,估算速度均方根百分比误差平均增大5.19%。因此,空间分辨率的降低可以提高交通参数估算模型中流量估算和密度估算的精度,但是却导致速度估算精度降低。
2)ADAS 车辆渗透率对交通参数估计精度的影响。在不考虑时间分辨率和空间分辨率因素影响的情况下,利用3%,5%,7%,10%和15%这5 种ADAS 车辆渗透率下的精度指标进行比较,发现随着ADAS车辆的渗透率的提升,估算流量、估算密度和估算速度的均方根百分比误差整体上呈减小趋势,且估算流量、估算密度和估算速度同检测器相应观测数据的平均拟合程度呈现上升趋势。同时,发现7%和15%ADAS 车辆渗透率下估算流量和估算密度也存在个别异常值,分析判断可能是由于ADAS车辆驶出主线道路或者匝道车辆驶入主线道路的影响。因此,总体上分析,ADAS车辆渗透率的提升,对提高交通参数估算模型精度及其同检测器观测数据拟合程度具有重要意义。
5 结束语
笔者对道路交通参数估算模型进行研究,通过分析ADAS车辆采集的关键信息DHW与交通量的相关性,利用广义交通量定义并结合多车道道路条件、车辆自由换道和非均匀变速驾驶特性,建立了1种基于DHW的时空区域交通参数估算模型。利用仿真手段,获取实验数据对所建交通参数估算模型进行标定和验证;同时对不同时间分辨率、空间分辨率和ADAS 车辆渗透率下的流量、密度和速度的估算精度进行分析。研究结果表明:①降低时间分辨率对交通参数估算模型的精度具有提升作用;②降低空间分辨率一定程度上可以提高交通参数估算模型中估算流量和估算密度的精度,却可能降低估算速度的精度;③作为数据采集车的ADAS车辆,随着其渗透率的提升,可以减小交通参数估算模型的误差,并提高估算交通参数同检测器观测数据的整体拟合程度。
本研究建立了1种基于ADAS联网数据的时空区域交通参数估算模型,可获取道路特定时空区域内的交通量信息,在较低的渗透率下具有一定的估计精度,但模型如何充分利用多车道目标感知参数,以提高模型的估算精度还需要进一步探索。后续将深入探讨影响模型精度的关键因素,对交通参数估算模型进行改进以降低误差。
猜你喜欢
四川党的建设(2022年8期)2022-04-28
童话世界(2020年32期)2020-12-25
小学生学习指导(低年级)(2020年11期)2020-12-14
数学物理学报(2019年3期)2019-07-23
作文大王·低年级(2018年10期)2018-12-06
家庭影院技术(2018年9期)2018-11-02
小学生导刊(2018年16期)2018-07-02
自动化学报(2017年5期)2017-05-14
成都信息工程大学学报(2017年6期)2017-03-16
小猕猴智力画刊(2016年5期)2016-05-14
