周扫式激光通信光端机锁紧刚度优化
2021-04-29 13:23:38张友建李小明张家齐张立中李响
长春理工大学学报(自然科学版) 2021年2期
张友建,李小明,2,张家齐,2,张立中,2,李响,2
(1.长春理工大学 机电工程学院,长春 130022;2.长春理工大学 空间光电技术国家地方联合工程研究中心,长春 130022)
空间激光通信技术具有通信速率高、抗干扰能力强、抗截获能力强、系统功耗小等优势,使其非常适合深空、星际、星地、空空、空地等链路通信,已成为打破微波通信速率提高困难的瓶颈,实现卫星海量数据高速传输极具发展前景的潜在通信手段[1-2]。在星载激光通信系统中,由于通信光束发散角小,必须采用光端机对光束进行瞄准、捕获与跟踪[3]。周扫式光端机具有转动范围大、运动负载小、转动惯量小等优点,非常适合中小型低轨道卫星激光通信系统,实现大范围的光轴对准。而光端机在火箭发射过程中,振动、冲击等力学环境恶劣,易发射低频共振,因此必须用锁紧机构对运动部件进行锁紧以提高系统的谐振频率。
目前航天应用较成熟的锁紧机构一般采用爆炸螺栓等火工品对光端机转动部分进行锁定,但火工品有质量大、解锁振动大、易产生污染等缺点。为替代火工品出现了采用电磁铁作为驱动源的锁紧机构,其特点是使用电磁铁或记忆合金丝输出的一端拉(压)驱动机械机构完成拔销或分瓣螺母分解等实现解锁[4-6],其存在机械结构复杂、重量大、解锁后无法重复锁紧等问题。
形状记忆合金作为一种新型的、具有形状记忆效应(Shape Memory Effect,SME)的金属材料,在20世纪30年代开始被人们不断的研究,美国NASA针对传统的火工品解锁机构存在的问题,发展了形状记忆合金(Shape memory alloy,SMA)柱驱动分瓣螺母解锁机构[7-8],该解锁机构具有承载大、体积小、低冲击、无污染等优点,但由于其依靠SMA柱驱动,而SMA柱的作动时间比较长,同步性基本得不到保障,使得其在很多场合根本无法使用。北京航空航天大学提出一种基于SMA的分瓣螺母空间解锁机构,其优点在于安装体积小、解锁速度快,但无法在轨重复使用[9]。本文针对星载周扫式激光通信光端机伺服转动部分的锁紧及解锁需求,设计了一种基于形状记忆合金丝的锁紧机构[10],并重点对其锁紧刚度进行优化,以降低锁紧机构解锁所需功耗。
1 周扫式激光通信光端机
周扫式光端机结构形式示意图如图1所示。周扫式激光通信光端机后续光学系统安装在卫星星体上保持不动,光端机可绕Z1轴做方位转动,绕Y1轴做俯仰转动,通过两面分别跟随方位轴与俯仰轴转动的反射镜调整光轴方向,实现光轴跟踪与对准。
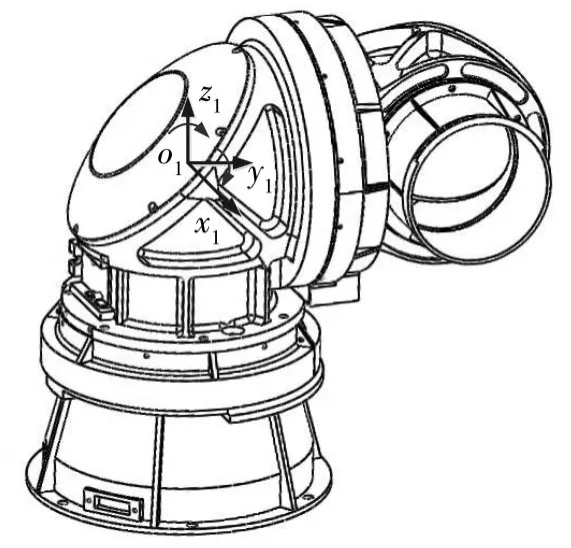
图1 周扫式光端机结构示意图
周扫式光端机外形和内部结构如图2所示,光端机主要由方位轴系、俯仰轴系、反射镜组件、导电滑环、遮光罩和锁紧机构构成,方位轴系通过法兰安装在卫星平台上,带动光端机做方位转动,俯仰轴系带动反射镜组件1及遮光罩做俯仰运动,通过两面反射镜完成光轴的调整。光端机通光口径为70 mm。由于运载火箭发射过程当中光端机电机不上电,系统的方位和俯仰轴处于自由状态,为保证发射状态下光端机谐振频率满足要求,必须对光端机进行锁紧。传统锁紧用的爆炸螺栓重量为500 g,造成系统重量超出设计要求。因此系统设计记忆合金驱动的新型锁紧机构,锁紧机构通过支架与光端机方位轴系轴座固连,通过锁紧钩对遮光罩进行锁定,实现光端机的锁紧。

图2 周扫式光端机结构剖视图
2 锁紧机构原理
锁紧机构结构如图3所示,周扫式光端机位于锁紧位置时,方位轴与俯仰轴转动带动遮光罩向A方向运动,因此只要考虑限制遮光罩沿A方向的运动,即采用一个锁紧机构限制遮光罩的运动即可实现对两个轴系的锁定。

图3 锁紧机构结构图
锁紧机构采用锁紧钩结构,定位楔块与锁紧机构基座同光端机基座相连,两者位置固定。锁紧钩可绕旋转轴O1转动,锁紧钩一端连接弹簧,通过弹簧弹力将锁紧钩顶起实现锁紧。记忆合金丝一端与锁紧基座固定另一端连接锁紧钩,锁紧机构中使用的记忆合金丝具热缩性,因此记忆合金丝在锁紧机构基座中绕绝缘柱排布,在有限的空间里最大化的增加记忆合金丝的总体长度,进而增加其热收缩变形量。锁紧时光端机转动到指定位置后遮光罩一端与定位楔块的斜面贴合另一端被顶起的锁紧钩顶住,遮光罩被锁紧结构限制无法运动,光端机两回转轴被锁住无法转动。解锁时,通过给记忆合金丝通电加热而收缩,克服弹簧弹力带动锁紧钩落下,光端机方位轴转动带动遮光轴平移出锁定位置完成解锁。
3 锁紧机构参数分析
锁紧钩子结构如图4所示,锁紧钩与遮光轴接触锥面角度设计为θ,保证锁紧钩锁紧可靠。Fj为记忆合金丝拉力,lj为Fj作用在回转轴O1上的力臂,Ft为弹簧弹力,lt为弹力作用在旋转轴O1上的力臂,根据机构设计θ=3°,解锁时锁紧钩移动距离为10 mm。
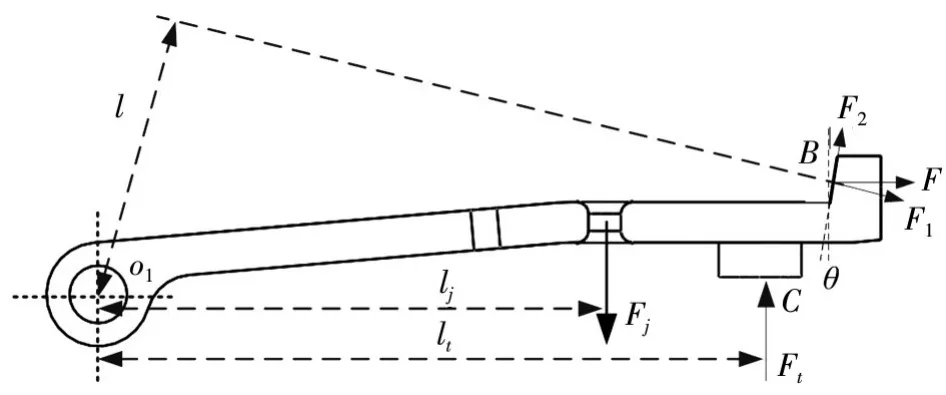
图4 锁紧钩受力分析图
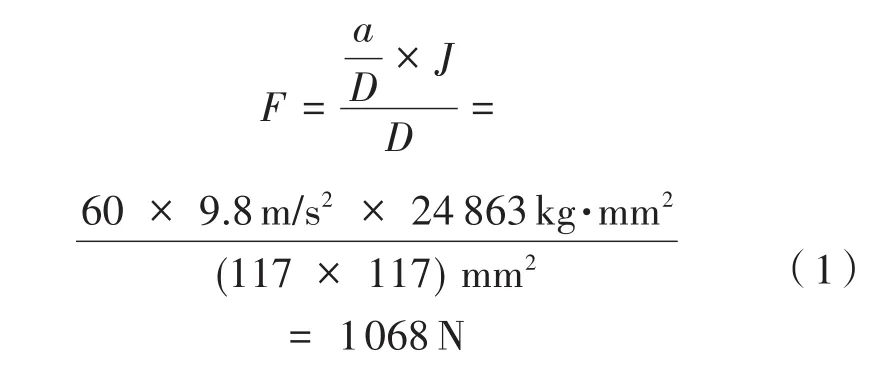
根据周扫转台结构三维模型分析转台转动部件绕方位轴的转动惯量J为24 863 kg·mm²,方位轴距锁紧点的距离D为117 mm,发射时系统所受的最大加速度载荷a为60 g。发射时锁紧机构所受的最大推力F为:
由图4可见,推力F作用在锥面上后其产生的分力F1产生的力矩有推动锁紧钩顺时针转动的趋势,弹簧的弹力Ft必须抵消该力矩,否则会造成锁紧失效。为保证弹簧有足够的弹力,则:

根据设计l=3.28 mm,lt=55 mm,lj=44 mm,由上式得:

因此锁紧时要求弹簧弹力要大于64 N。
根据图4可知,C点沿Ft方向上的位移∆C与B点沿F方向上位移∆B的关系为:
所以当锁紧弹簧刚度为k时,其在B点处产生的锁紧刚度kB为:

4 锁紧刚度分析
锁紧机构是采用弹簧通过锁紧钩对机构提供锁紧力,实现机构锁紧,所以锁紧时结构相当于在遮光罩锁紧处采用了一个弹性系统,系统的刚度直接影响系统谐振频率。因此,将锁紧结构等效为一个弹簧单元,一端与遮光罩连接,另一端与锁紧盘连接,弹簧方向沿图中A方向,采用RBE2单元限制遮光罩其余两个方向的运动。用有限元方法分析在不同弹簧刚度作用下系统的谐振频率变化情况,整机有限元模型如图5所示。
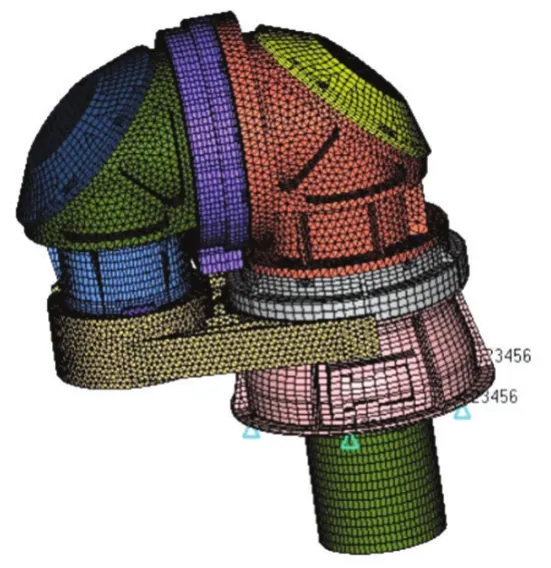
图5 周扫式光端机有限元模型
由图6系统一阶模态与锁紧刚度的关系图可见,随着锁紧刚度kB的增大,周扫转台的一阶模态不断提高,当刚度达到5 700 N/mm后一阶模态大于70 Hz,当刚度大于8 500 N/mm后,由于遮光轴刚度的限制,转台一阶模态不再明显增大。锁紧刚度大,有利于提高转台的一阶模态,但同时会造成所需解锁力增大,一方面增加记忆合金的拉力对合金强度提出更高要求,同时也增加了解锁功耗,为此在满足转台一阶模态设计要求的前提下应该尽量减小锁紧刚度。
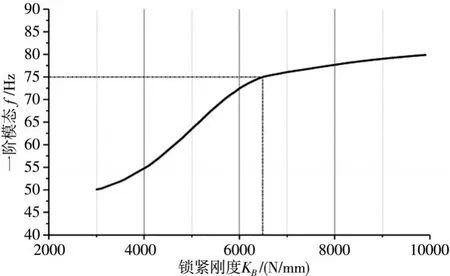
图6 系统一阶模态与锁紧刚度关系图
由于转台设计要求锁紧时一阶模态大于70 Hz,留取设计余量后锁紧刚度kB选取为6 500 N,锁紧弹簧刚度为,弹簧在锁紧时压缩量大于3.5 mm,解锁时弹簧继续压缩10 mm,解锁力为Fj=kΔl=200 N。
5 实验与测试
如图7所示,选取一段弹簧刚度k=20 N/mm的弹簧,首先在弹簧与锁紧机构基座连接的地方垫一个垫片,通过修整垫片的高度来调节弹簧的压缩量在3.5 mm,并将装配好的锁紧机构固定在锁紧盘上。

图7 锁紧机构实物图
如图8所示,设计工装模拟遮光罩,在工装的中间安装一个压力传感器(读数单位kg),将锁紧机构通电加热,使锁紧钩回缩,将工装固定在锁紧盘上,并将锁紧机构断电,使锁紧机构对模拟遮光罩的工装进行锁紧,通过压力传感器可以测得目前状态下工装所承受的锁紧力为1 072 N。
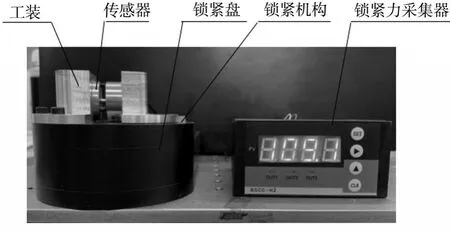
图8 锁紧力测试系统
在室温条件下对锁紧机构进行重复性试验,给记忆合金丝通12 V/3 A电源,通过单片机控制通断电,对锁紧机构重复解锁/锁紧试验200次,锁紧机构依然可以正常工作。
将此记忆合金锁紧机构安装到周扫式激光通信光端机上,在锁紧状态时进行了扫频测试,振动台参数如表1所示。
表1 扫频振动试验条件
对周扫式跟瞄系统整机结构进行x、y、z三个方向的三次扫频实验,实验现场及测试曲线如图9所示。

图9 y向扫频测试现场
在图10(a)、图10(b)、图10(c)中所示的扫频曲线为对数扫频,其纵坐标表示幅值比,横坐标表示频率,单位为Hz。扫频在Y向得到的频率最低为76.48 Hz,测试曲线如图10所示。试验结果表明转台锁紧时的一阶谐振频率为76.48 Hz与设计值75 Hz仅存在0.68%的误差,满足锁紧时一阶固有频率≥70 Hz的指标要求。
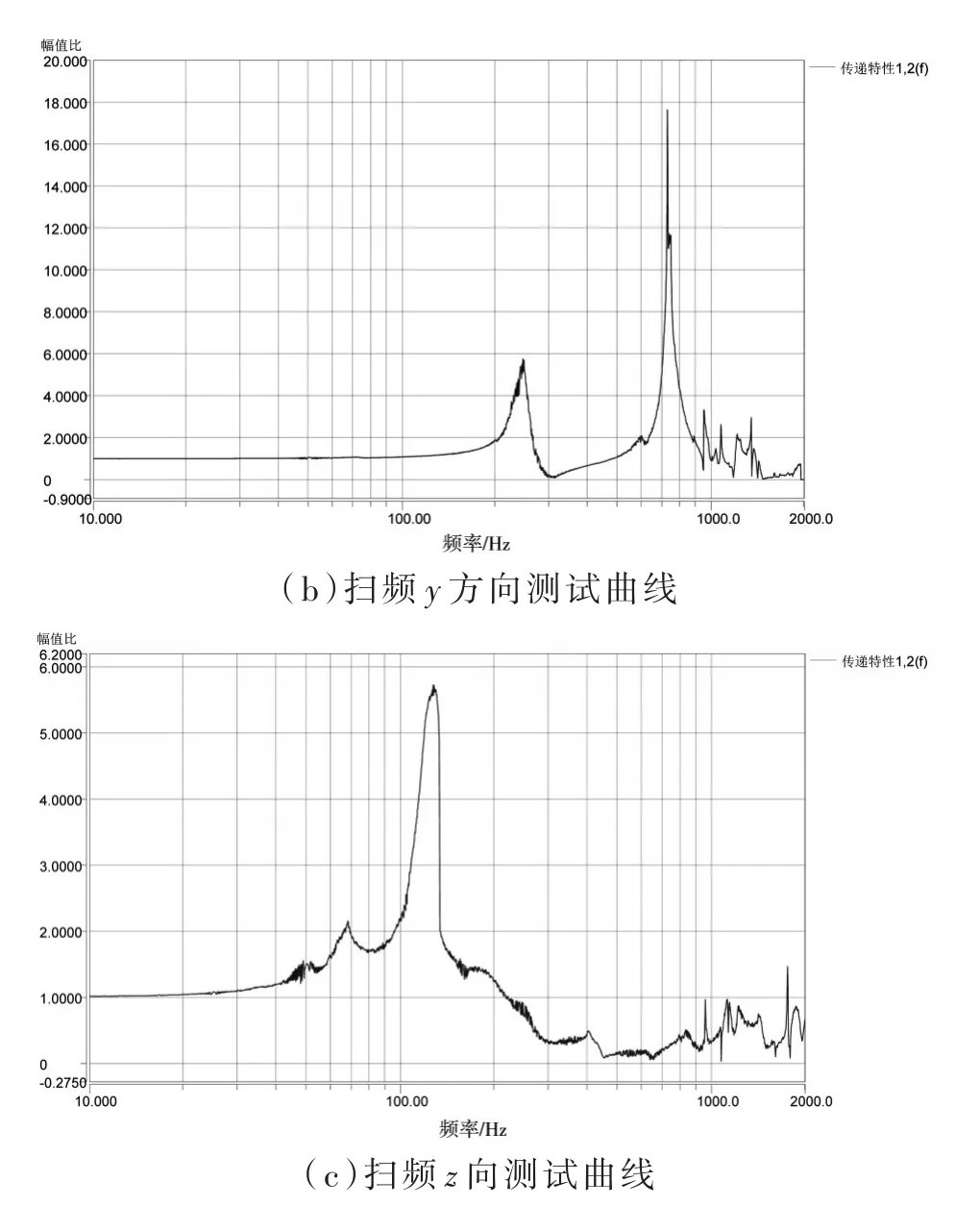
图10 测试曲线
在完成加速度载荷a=60 g,时间3 ms的后向矩齿波冲击测试后,周扫式光端机能够正常工作,锁紧机构优化设计合理,满足使用要求。

6 结论
本文以应用于周扫式转台的采用记忆合金解锁的锁紧机构为对象,分析了锁紧机构锁紧弹簧刚度与转台一阶模态的关系,在保证转台一阶模态满足设计要求的前提下优化选取了锁紧机构参数,使锁紧结构具有较小的解锁力,减小对记忆合金丝的要求和解锁功耗。锁紧状态下周扫转台扫频试验表明转台锁紧时的一阶谐振频率为76.48 Hz,优化后的锁紧结构参数与设计结果基本一致,满足设计要求。
猜你喜欢
航天器环境工程(2020年3期)2020-11-04 06:46:24
科学技术创新(2020年21期)2020-01-06 20:58:51
中学生数理化·八年级物理人教版(2019年12期)2019-05-21 07:26:42
新生代(2018年20期)2018-11-13 21:01:21
电子测试(2017年12期)2017-12-18 06:35:24
电子制作(2017年8期)2017-06-05 09:36:15
通信技术(2016年12期)2016-12-28 10:34:54
中国新技术新产品(2015年17期)2015-12-23 06:53:06
中国工程咨询(2015年8期)2015-02-16 06:38:52
中国交通信息化(2014年8期)2014-06-05 03:24:15